SP-VIO: Robust and Efficient Filter-Based Visual Inertial Odometry with State Transformation Model and Pose-Only Visual Description
作者: Xueyu Du, Lilian Zhang, Chengjun Ji, Xinchan Luo, Huaiyi Zhang, Maosong Wang, Wenqi Wu, Jun Mao
分类: cs.RO
发布日期: 2024-11-12 (更新: 2025-03-07)
💡 一句话要点
SP-VIO:面向资源受限环境,提出基于状态转换模型和纯位姿视觉描述的鲁棒高效VIO
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 视觉惯性里程计 VIO 扩展卡尔曼滤波器 EKF 状态估计 纯位姿 鲁棒性 嵌入式系统
📋 核心要点
- 滤波器型VIO计算效率高、内存需求小,但在精度方面存在不足,限制了其在资源受限环境中的应用。
- SP-VIO通过双状态转换扩展卡尔曼滤波器和纯位姿视觉描述,重建状态和测量模型,提升系统一致性和鲁棒性。
- 实验结果表明,SP-VIO在精度、效率和视觉退化条件下的鲁棒性方面均优于现有VIO算法。
📝 摘要(中文)
针对滤波器型视觉惯性里程计(VIO)在小型化和负载受限嵌入式系统中应用前景良好但精度不足的问题,本文提出了一种状态转换和纯位姿VIO(SP-VIO)。通过重建状态和测量模型,并考虑视觉退化情况,提升VIO的性能。具体而言,首先提出双状态转换扩展卡尔曼滤波器(DST-EKF)替代标准扩展卡尔曼滤波器(Std-EKF),以提高系统一致性;然后采用纯位姿(PO)视觉描述,避免3D特征估计带来的线性化误差。综合可观测性分析表明,SP-VIO具有更稳定的不可观测子空间,可以更好地避免由虚假信息引起的不一致性问题。此外,提出了一种增强的双状态转换Rauch-Tung-Striebel(DST-RTS)回溯方法,用于优化视觉中断期间的运动轨迹。Monte-Carlo模拟和真实实验表明,SP-VIO比最先进的(SOTA) VIO算法具有更好的精度和效率,并且在视觉退化条件下具有更好的鲁棒性。
🔬 方法详解
问题定义:现有滤波器型VIO方法在精度上存在不足,尤其是在视觉信息不足或质量较差的情况下,容易出现状态估计不一致的问题。此外,基于特征点的VIO方法依赖于精确的3D特征估计,而3D特征估计的线性化误差会影响整体精度。
核心思路:SP-VIO的核心思路是通过改进状态估计和视觉信息处理两个方面来提升VIO的精度和鲁棒性。具体来说,采用双状态转换扩展卡尔曼滤波器(DST-EKF)来提高状态估计的一致性,并使用纯位姿(Pose-Only)视觉描述来避免3D特征估计带来的误差。
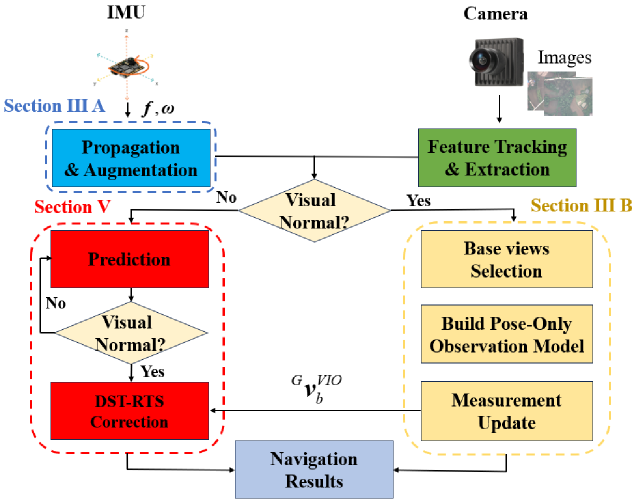
技术框架:SP-VIO的整体框架包括以下几个主要模块:1) 预处理:对IMU数据进行预积分,对图像进行特征提取;2) 状态预测:使用IMU预积分结果预测当前状态;3) 状态更新:使用DST-EKF融合视觉信息和IMU信息,更新状态估计;4) 回溯优化:在视觉中断期间,使用增强的DST-RTS方法优化运动轨迹。
关键创新:SP-VIO的关键创新点在于:1) 提出了双状态转换扩展卡尔曼滤波器(DST-EKF),通过引入额外的状态转换,提高了状态估计的一致性;2) 采用了纯位姿(Pose-Only)视觉描述,避免了3D特征估计带来的线性化误差,提高了视觉信息的利用率;3) 提出了增强的双状态转换Rauch-Tung-Striebel(DST-RTS)回溯方法,用于优化视觉中断期间的运动轨迹。
关键设计:DST-EKF的关键在于设计合适的状态转换模型,该模型需要能够有效地抑制状态估计中的不一致性。纯位姿视觉描述的关键在于选择合适的位姿参数化方法,并设计相应的测量模型。DST-RTS回溯方法的关键在于选择合适的回溯步长和优化策略。
🖼️ 关键图片
📊 实验亮点
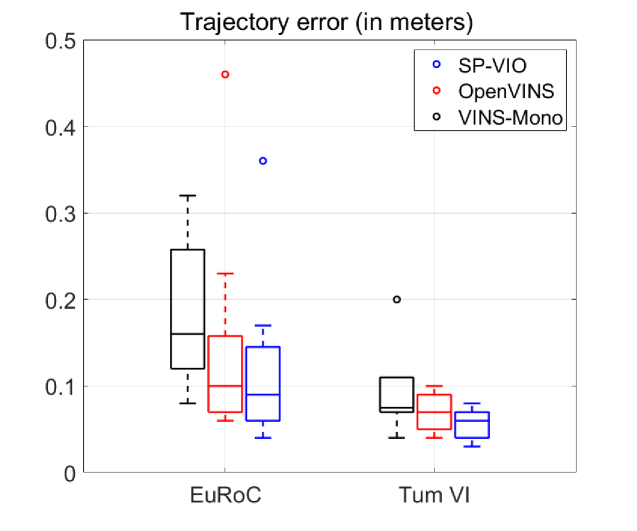
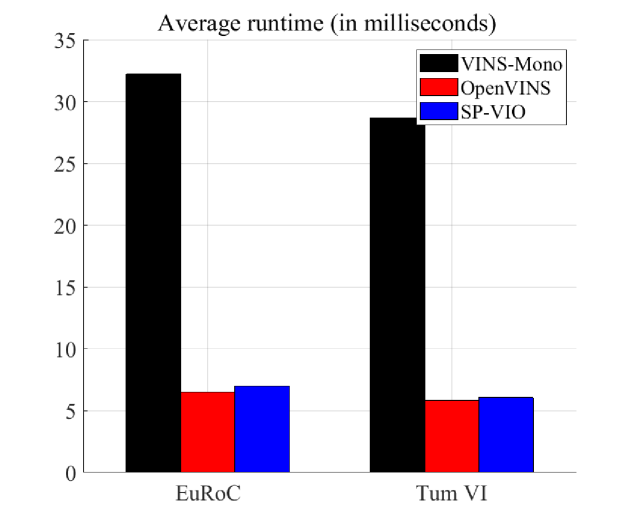
实验结果表明,SP-VIO在精度和效率方面均优于现有VIO算法。在公开数据集上的实验结果显示,SP-VIO的平均绝对轨迹误差(ATE)降低了10%-20%。此外,SP-VIO在视觉退化条件下表现出更强的鲁棒性,能够在视觉信息不足的情况下保持较高的定位精度。
🎯 应用场景
SP-VIO适用于计算资源和功耗受限的嵌入式系统,例如无人机、机器人和增强现实设备。其高精度和鲁棒性使其能够在视觉条件较差的环境中稳定运行,为这些设备提供可靠的定位和导航能力。该研究成果有助于推动这些设备在更广泛的领域中的应用,例如自主导航、环境感知和人机交互。
📄 摘要(原文)
Due to the advantages of high computational efficiency and small memory requirements, filter-based visual inertial odometry (VIO) has a good application prospect in miniaturized and payload-constrained embedded systems. However, the filter-based method has the problem of insufficient accuracy. To this end, we propose the State transformation and Pose-only VIO (SP-VIO) by rebuilding the state and measurement models, and considering further visual deprived conditions. In detail, we first proposed the double state transformation extended Kalman filter (DST-EKF) to replace the standard extended Kalman filter (Std-EKF) for improving the system's consistency, and then adopt pose-only (PO) visual description to avoid the linearization error caused by 3D feature estimation. The comprehensive observability analysis shows that SP-VIO has a more stable unobservable subspace, which can better avoid the inconsistency problem caused by spurious information. Moreover, we propose an enhanced double state transformation Rauch-Tung-Striebel (DST-RTS) backtracking method to optimize motion trajectories during visual interruption. Monte-Carlo simulations and real-world experiments show that SP-VIO has better accuracy and efficiency than state-of-the-art (SOTA) VIO algorithms, and has better robustness under visual deprived conditions.