Adaptive Body Schema Learning System Considering Additional Muscles for Musculoskeletal Humanoids
作者: Kento Kawaharazuka, Akihiro Miki, Yasunori Toshimitsu, Kei Okada, Masayuki Inaba
分类: cs.RO
发布日期: 2024-11-10
备注: Accepted at IEEE Robotics and Automation Letters
💡 一句话要点
针对肌肉骨骼人形机器人,提出考虑额外肌肉的自适应身体图式学习系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 肌肉骨骼人形机器人 身体图式学习 自适应学习 模块化设计 肌肉张力 运动控制
📋 核心要点
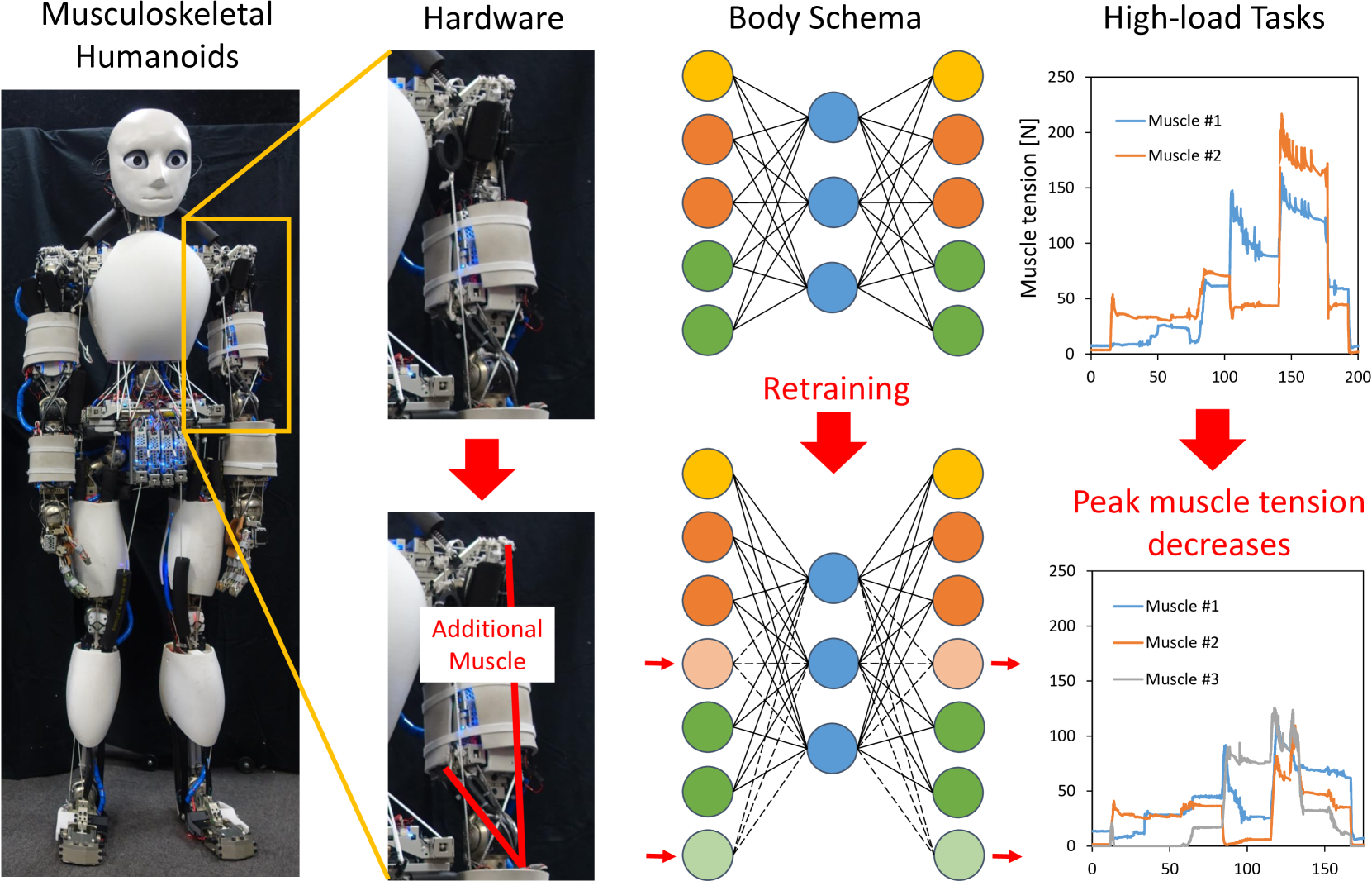
- 肌肉骨骼人形机器人可灵活调整肌肉排布,但如何有效利用新增肌肉并适应由此带来的身体图式变化是一大挑战。
- 该研究提出一种自适应身体图式学习系统,通过少量运动数据学习额外肌肉带来的身体图式变化。
- 实验表明,该方法能有效应用于1自由度腱驱动机器人和人形机器人手臂,并降低高负荷任务中的肌肉张力。
📝 摘要(中文)
本研究针对肌肉骨骼人形机器人,提出了一种肌肉增加的整体系统,以及考虑额外肌肉的自适应身体图式学习方法。肌肉骨骼人形机器人的一个重要优势是,可以根据情况轻松改变肌肉排列并增加肌肉数量。在硬件方面,我们描述了一种可以安装额外肌肉的模块化身体设计。在软件方面,我们描述了一种可以从小量运动数据中学习与额外肌肉相关的身体图式变化的方法。我们将该方法应用于一个简单的1自由度腱驱动机器人仿真以及肌肉骨骼人形机器人Musashi的手臂,并展示了通过增加肌肉来放松高负荷任务中的肌肉张力的有效性。
🔬 方法详解
问题定义:肌肉骨骼人形机器人可以通过增加肌肉来提高性能,但如何有效地学习和适应由于增加肌肉而引起的身体图式变化是一个关键问题。现有的方法可能需要大量的训练数据或者难以处理肌肉配置的改变。
核心思路:该研究的核心思路是通过少量运动数据来学习由于增加肌肉而引起的身体图式变化。通过建立一个自适应的身体图式学习系统,机器人可以快速适应新的肌肉配置,并有效地利用新增肌肉来完成任务。
技术框架:该系统包含硬件和软件两部分。硬件方面,采用模块化身体设计,方便安装额外肌肉。软件方面,设计了一种自适应身体图式学习方法,该方法能够从小量运动数据中学习身体图式的变化。整体流程包括:1) 机器人进行少量运动,产生运动数据;2) 自适应身体图式学习模块利用这些数据学习身体图式的变化;3) 机器人利用学习到的身体图式来控制运动。
关键创新:该研究的关键创新在于提出了一种能够从小量运动数据中学习身体图式变化的自适应学习方法。与需要大量数据的传统方法相比,该方法能够更快地适应新的肌肉配置。此外,模块化的硬件设计也使得增加肌肉变得更加容易。
关键设计:具体的学习方法细节未知,摘要中没有明确说明损失函数、网络结构等信息。但是,可以推断,该方法可能利用了某种形式的优化算法,通过最小化预测运动与实际运动之间的差异来学习身体图式参数。具体的参数设置未知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法能够有效地应用于1自由度腱驱动机器人仿真以及肌肉骨骼人形机器人Musashi的手臂。通过增加肌肉,可以有效地降低高负荷任务中的肌肉张力,从而提高机器人的性能和效率。具体的性能提升数据未知,摘要中没有给出量化结果。
🎯 应用场景
该研究成果可应用于各种肌肉骨骼人形机器人,尤其是在需要根据任务动态调整肌肉配置的场景中。例如,在康复机器人领域,可以根据患者的康复进度调整肌肉配置,并利用该系统快速学习新的身体图式。此外,该技术还可以应用于工业机器人,使其能够适应不同的工作环境和任务需求。
📄 摘要(原文)
One of the important advantages of musculoskeletal humanoids is that the muscle arrangement can be easily changed and the number of muscles can be increased according to the situation. In this study, we describe an overall system of muscle addition for musculoskeletal humanoids and the adaptive body schema learning while taking into account the additional muscles. For hardware, we describe a modular body design that can be fitted with additional muscles, and for software, we describe a method that can learn the changes in body schema associated with additional muscles from a small amount of motion data. We apply our method to a simple 1-DOF tendon-driven robot simulation and the arm of the musculoskeletal humanoid Musashi, and show the effectiveness of muscle tension relaxation by adding muscles for a high-load task.