A Retrospective on the Robot Air Hockey Challenge: Benchmarking Robust, Reliable, and Safe Learning Techniques for Real-world Robotics
作者: Puze Liu, Jonas Günster, Niklas Funk, Simon Gröger, Dong Chen, Haitham Bou-Ammar, Julius Jankowski, Ante Marić, Sylvain Calinon, Andrej Orsula, Miguel Olivares-Mendez, Hongyi Zhou, Rudolf Lioutikov, Gerhard Neumann, Amarildo Likmeta Amirhossein Zhalehmehrabi, Thomas Bonenfant, Marcello Restelli, Davide Tateo, Ziyuan Liu, Jan Peters
分类: cs.RO, cs.AI, cs.LG
发布日期: 2024-11-08
备注: Accept at NeurIPS 2024 Dataset and Benchmark Track
💡 一句话要点
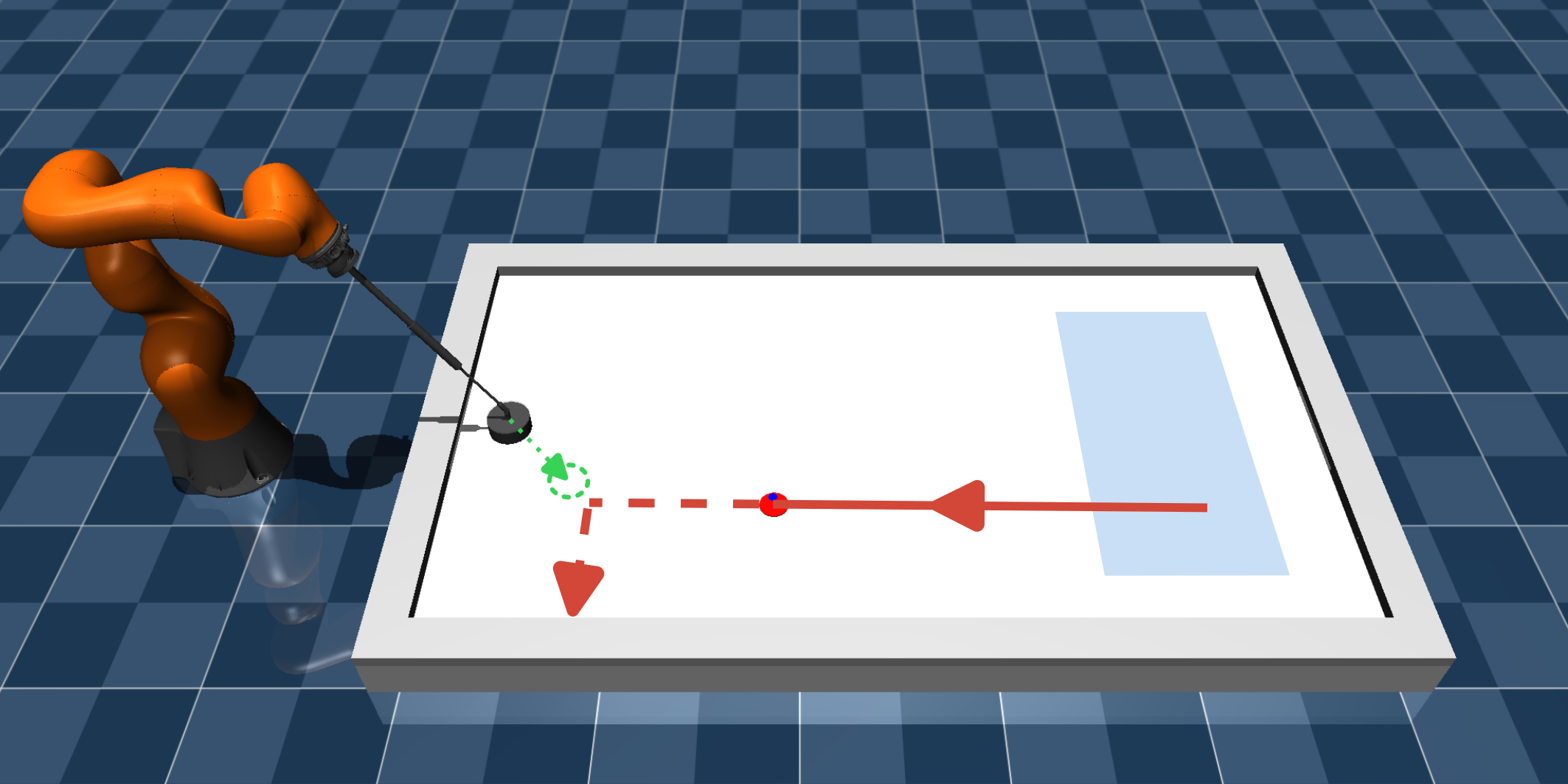
机器人气悬球挑战赛:评估真实机器人鲁棒、可靠和安全学习技术
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人学习 强化学习 sim-to-real 气悬球 真实机器人 鲁棒性 安全性
📋 核心要点
- 现有机器人学习方法在真实机器人部署中面临sim-to-real差距、安全问题和实时性等挑战。
- 论文通过组织机器人气悬球挑战赛,鼓励研究者探索结合先验知识与学习的鲁棒解决方案。
- 挑战赛结果表明,结合先验知识的学习方法优于纯数据驱动方法,并揭示了易被忽视的真实世界因素。
📝 摘要(中文)
机器学习方法在许多应用领域都产生了突破性的影响,但它们在真实机器人平台上的应用仍然有限。尽管将机器学习技术与机器人技术相结合面临诸多挑战,但机器人学习仍然是增强机器人能力最有希望的方向之一。在真实机器人上部署基于学习的方法时,需要付出额外的努力来应对各种真实世界因素带来的挑战。为了研究影响真实世界部署的关键因素,并鼓励不同研究人员提出原创解决方案,我们在 NeurIPS 2023 会议上组织了机器人气悬球挑战赛。我们选择气悬球任务作为基准,涵盖了低级机器人问题和高级战术。与其他以机器学习为中心的基准不同,参与者需要应对机器人技术中的实际挑战,例如 sim-to-real 差距、低级控制问题、安全问题、实时要求以及真实世界数据的有限可用性。此外,我们专注于动态环境,消除了其他真实世界基准中常见的准静态运动假设。比赛结果表明,当真实世界部署具有挑战性时,将基于学习的方法与先验知识相结合的解决方案优于仅依赖数据的解决方案。我们的消融研究揭示了在构建基于学习的解决方案时可能被忽视的真实世界因素。表现最佳的智能体成功部署真实世界气悬球为未来的比赛和后续研究方向奠定了基础。
🔬 方法详解
问题定义:论文旨在解决机器学习方法在真实机器人平台上部署时面临的挑战,例如sim-to-real差距、低级控制问题、安全问题、实时要求以及真实世界数据的有限可用性。现有方法通常难以在动态、复杂的真实环境中保证鲁棒性和可靠性。
核心思路:论文的核心思路是通过组织机器人气悬球挑战赛,鼓励研究者探索将基于学习的方法与先验知识相结合的解决方案。这种结合可以弥补纯数据驱动方法在数据有限和环境复杂情况下的不足,并提高系统的泛化能力和安全性。
技术框架:挑战赛的技术框架主要包括以下几个方面:1)气悬球机器人平台的设计与搭建;2)比赛规则的制定,包括任务目标、约束条件和评估指标;3)参赛队伍提交的解决方案,涵盖感知、规划、控制和学习等模块;4)比赛结果的评估与分析,以及消融研究,用于揭示不同因素对系统性能的影响。
关键创新:论文的关键创新在于:1)将气悬球任务作为一个综合性的机器人学习基准,涵盖了低级控制和高级策略;2)强调了真实世界部署的挑战,例如sim-to-real差距和实时性要求;3)通过挑战赛的形式,促进了不同研究团队之间的交流与合作,并推动了相关技术的发展。
关键设计:挑战赛的关键设计包括:1)气悬球平台的硬件设计,需要保证运动的精度和速度;2)比赛规则的设计,需要平衡任务的难度和可玩性;3)评估指标的设计,需要综合考虑系统的性能、鲁棒性和安全性;4)消融研究的设计,需要选择合适的因素进行分析,例如先验知识的引入方式、学习算法的选择等。
🖼️ 关键图片


📊 实验亮点
挑战赛结果表明,结合学习方法与先验知识的解决方案优于仅依赖数据的解决方案。消融研究揭示了在构建基于学习的解决方案时可能被忽视的真实世界因素,例如精确的动力学模型和鲁棒的感知算法。表现最佳的智能体成功部署真实世界气悬球,为未来的比赛和后续研究方向奠定了基础。
🎯 应用场景
该研究成果可应用于其他真实机器人任务,例如工业自动化、服务机器人和自主导航。通过结合先验知识和学习方法,可以提高机器人在复杂环境中的适应性和鲁棒性,从而实现更安全、更可靠的机器人应用。未来的研究可以进一步探索如何有效地融合不同类型的先验知识,并开发更高效、更安全的机器人学习算法。
📄 摘要(原文)
Machine learning methods have a groundbreaking impact in many application domains, but their application on real robotic platforms is still limited. Despite the many challenges associated with combining machine learning technology with robotics, robot learning remains one of the most promising directions for enhancing the capabilities of robots. When deploying learning-based approaches on real robots, extra effort is required to address the challenges posed by various real-world factors. To investigate the key factors influencing real-world deployment and to encourage original solutions from different researchers, we organized the Robot Air Hockey Challenge at the NeurIPS 2023 conference. We selected the air hockey task as a benchmark, encompassing low-level robotics problems and high-level tactics. Different from other machine learning-centric benchmarks, participants need to tackle practical challenges in robotics, such as the sim-to-real gap, low-level control issues, safety problems, real-time requirements, and the limited availability of real-world data. Furthermore, we focus on a dynamic environment, removing the typical assumption of quasi-static motions of other real-world benchmarks. The competition's results show that solutions combining learning-based approaches with prior knowledge outperform those relying solely on data when real-world deployment is challenging. Our ablation study reveals which real-world factors may be overlooked when building a learning-based solution. The successful real-world air hockey deployment of best-performing agents sets the foundation for future competitions and follow-up research directions.