Soft Gripping System for Space Exploration Legged Robots
作者: Arthur Candalot, Malik-Manel Hashim, Brigid Hickey, Mickael Laine, Mitch Hunter-Scullion, Kazuya Yoshida
分类: cs.RO
发布日期: 2024-11-08
备注: The 27th issue of the International Conference Series on Climbing and Walking Robots and the Support Technologies for Mobile Machines (CLAWAR)
💡 一句话要点
针对空间探索腿式机器人,提出一种基于软抓取和微刺的可靠抓取系统
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软抓取 腿式机器人 空间探索 微刺 腱驱动 行星探索 抓取系统
📋 核心要点
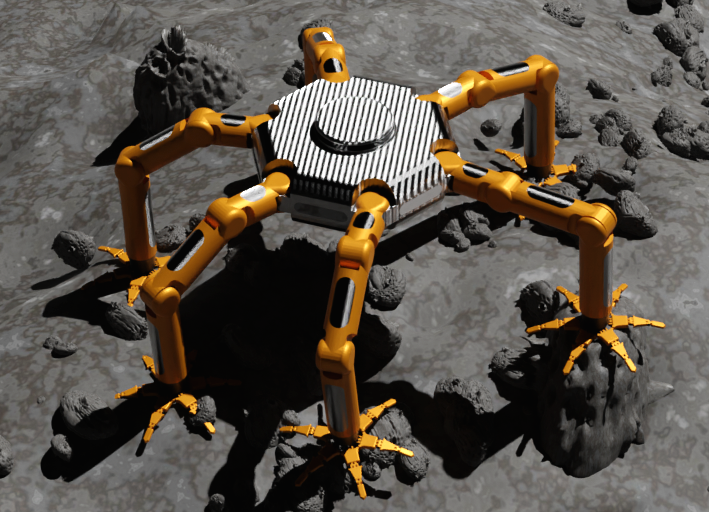
- 轮式机器人在行星探索中占据主导地位,但其几何结构限制了其在陡坡、岩石地形和微重力环境中的能力。
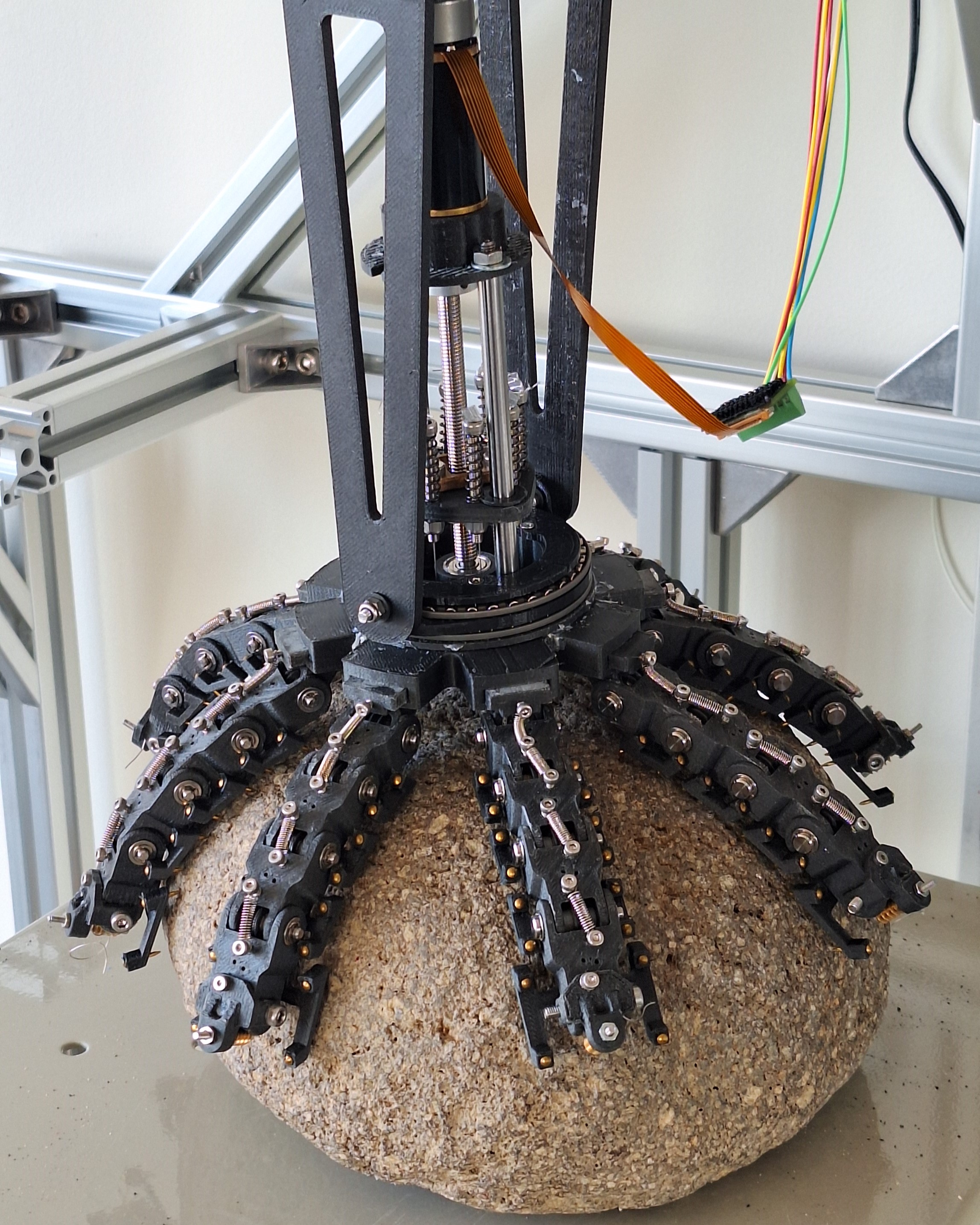
- 该论文提出一种软抓取系统,结合分段式腱驱动手指和微刺结构,以适应目标形状并在岩石表面产生强大的附着力。
- 实验结果表明,该抓取器在攀爬、月球洞穴和小行星表面探索等高级空间探索任务中具有应用潜力。
📝 摘要(中文)
本文提出了一种抓取系统,旨在为腿式空间探索机器人提供在不平坦岩石地形上可靠的锚定能力。该抓取器利用分段式腱驱动手指实现软抓取技术,使其能够适应目标形状。同时,借助微刺结构,在岩石表面形成强大的附着力。论文展示了抓取性能,并通过多项实验验证了拉动角度、目标形状、微刺配置和驱动功率对性能的影响。实验结果表明,所提出的抓取器是高级空间探索(包括攀爬、月球洞穴或小行星表面探索)的合适解决方案。
🔬 方法详解
问题定义:现有轮式机器人在复杂地形和微重力环境下存在局限性,而传统的刚性抓取器难以适应不规则的岩石表面,导致抓取不稳定。因此,需要一种能够适应复杂表面并提供可靠抓取的系统,以支持腿式机器人在空间探索中的应用。
核心思路:该论文的核心思路是结合软抓取和微刺技术。软抓取通过分段式手指适应目标形状,实现包络式抓取;微刺则在接触表面产生摩擦力,增强抓取力。这种结合既保证了适应性,又提供了足够的抓取强度。
技术框架:该抓取系统主要由以下几个部分组成:1) 分段式腱驱动手指:用于实现软抓取,适应目标形状;2) 微刺结构:用于增强在岩石表面的附着力;3) 驱动机构:用于控制手指的弯曲和抓取力;4) 控制系统:用于协调各个部分的运动,实现稳定的抓取。整个系统通过控制腱的张力来控制手指的运动,从而实现对目标的抓取。
关键创新:该论文的关键创新在于将软抓取和微刺技术结合,并将其应用于空间探索腿式机器人。这种结合克服了传统刚性抓取器在复杂地形下的局限性,提高了抓取的可靠性和适应性。此外,分段式腱驱动手指的设计也提高了抓取的灵活性。
关键设计:分段式手指的设计允许手指弯曲并适应各种形状。微刺的尺寸和密度是关键参数,需要根据目标表面的粗糙度进行优化。腱驱动系统的控制策略也至关重要,需要精确控制腱的张力,以实现稳定的抓取。此外,材料的选择也需要考虑空间环境的特殊要求,如耐辐射、耐高温等。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该抓取器能够适应不同形状的岩石表面,并提供足够的抓取力。通过调整拉动角度、微刺配置和驱动功率,可以优化抓取性能。具体数据(原文未提供,此处未知),但整体表现出该抓取器在复杂地形下具有良好的适应性和可靠性。
🎯 应用场景
该研究成果可应用于多种空间探索场景,例如月球和火星表面的攀爬和移动,小行星表面的锚定和采样,以及月球洞穴等复杂环境的探索。该抓取系统能够提高腿式机器人在这些环境中的运动能力和任务执行效率,为未来的空间探索任务提供有力支持。
📄 摘要(原文)
Although wheeled robots have been predominant for planetary exploration, their geometry limits their capabilities when traveling over steep slopes, through rocky terrains, and in microgravity. Legged robots equipped with grippers are a viable alternative to overcome these obstacles. This paper proposes a gripping system that can provide legged space-explorer robots a reliable anchor on uneven rocky terrain. This gripper provides the benefits of soft gripping technology by using segmented tendon-driven fingers to adapt to the target shape, and creates a strong adhesion to rocky surfaces with the help of microspines. The gripping performances are showcased, and multiple experiments demonstrate the impact of the pulling angle, target shape, spine configuration, and actuation power on the performances. The results show that the proposed gripper can be a suitable solution for advanced space exploration, including climbing, lunar caves, or exploration of the surface of asteroids.