Efficient Iterative Proximal Variational Inference Motion Planning
作者: Zinuo Chang, Hongzhe Yu, Patricio Vela, Yongxin Chen
分类: cs.RO
发布日期: 2024-11-05 (更新: 2025-09-27)
备注: 13 pages
期刊: Robotics and Autonomous Systems 174 (2025) 105267
DOI: 10.1016/j.robot.2025.105267
🔗 代码/项目: GITHUB
💡 一句话要点
提出并行高斯变分推理运动规划(P-GVIMP)算法,高效解决不确定性下的机器人运动规划问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 变分推理 随机最优控制 高斯过程 并行计算 机器人 不确定性 统计线性回归
📋 核心要点
- 现有运动规划方法在处理不确定性时,计算复杂度高,难以满足实时性要求,尤其是在高维空间和非线性系统下。
- 论文提出基于变分推理的运动规划框架,通过优化高斯分布来近似最优后验分布,并利用并行计算加速梯度评估。
- 实验结果表明,该方法在多种机器人系统上实现了显著的加速,并成功解决了不确定性下的非线性系统规划问题。
📝 摘要(中文)
本文将不确定性下的运动规划建模为随机最优控制问题,其中最优后验分布具有显式形式。为了逼近这个后验分布,本文通过在路径分布空间中求解变分推理(VI),将问题转化为高斯分布空间中的优化问题。针对线性高斯随机动力学系统,提出了一种近端算法来迭代求解最优高斯提议分布。计算瓶颈在于评估关于密集轨迹提议分布的梯度。为了解决这个问题,本文利用稀疏规划因子图和高斯置信传播(GBP),从而可以在图形处理器(GPU)上并行计算这些梯度。这种新范式被称为并行高斯变分推理运动规划(P-GVIMP)。在高效的线性高斯系统算法的基础上,本文进一步提出了一种基于统计线性回归(SLR)技术的迭代范式,用于解决非线性随机系统的规划问题,其中P-GVIMP作为每次迭代中线性化时变系统的子程序。所提出的框架在各种机器人系统上进行了验证,证明了通过利用并行计算实现的显著速度提升,以及针对不确定性下的非线性系统的成功规划解决方案。开源实现可在https://github.com/hzyu17/VIMP 获取。
🔬 方法详解
问题定义:论文旨在解决不确定性环境下的机器人运动规划问题。传统的运动规划方法在处理不确定性时,计算量大,难以满足实时性要求,尤其是在非线性系统和高维状态空间中。现有的基于采样的方法效率较低,而确定性优化方法难以处理复杂的不确定性模型。
核心思路:论文的核心思路是将运动规划问题转化为变分推理问题,通过优化一个高斯分布来近似最优的后验分布。这种方法利用了最优后验分布的显式形式,避免了直接求解复杂的随机最优控制问题。通过迭代优化高斯提议分布,逐步逼近最优解。
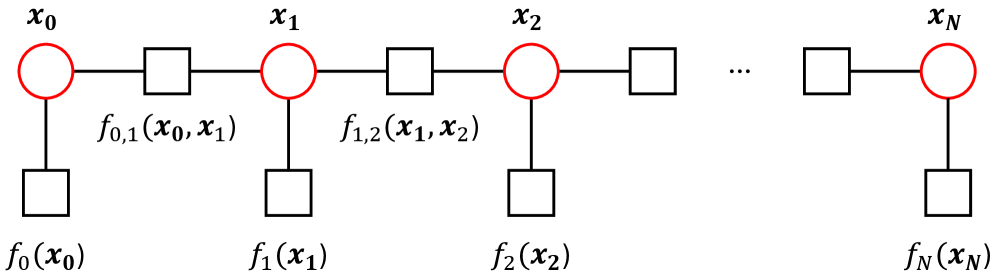
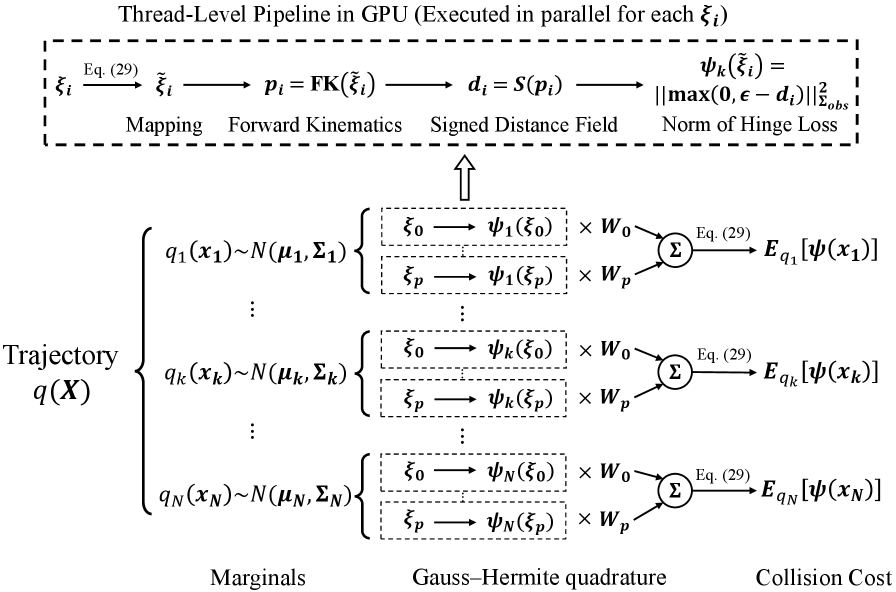
技术框架:整体框架包含以下几个主要步骤:1) 将运动规划问题建模为随机最优控制问题;2) 利用变分推理将问题转化为高斯分布空间中的优化问题;3) 针对线性高斯系统,提出基于近端算法的迭代优化方法;4) 利用稀疏规划因子图和高斯置信传播(GBP)在GPU上并行计算梯度,加速优化过程;5) 针对非线性系统,采用统计线性回归(SLR)技术进行迭代线性化,并在每次迭代中使用P-GVIMP作为子程序。
关键创新:论文的关键创新在于:1) 将变分推理应用于运动规划问题,提供了一种新的解决思路;2) 利用稀疏规划因子图和高斯置信传播(GBP)实现了梯度计算的并行化,显著提高了计算效率;3) 提出了基于统计线性回归(SLR)的迭代线性化方法,将P-GVIMP扩展到非线性系统。与现有方法相比,该方法在计算效率和处理非线性能力方面具有优势。
关键设计:在线性高斯系统中,使用近端算法迭代更新高斯提议分布的均值和方差。利用因子图表示运动规划问题,每个因子对应于动力学约束或成本函数。高斯置信传播(GBP)用于在因子图上高效地计算梯度。在非线性系统中,使用统计线性回归(SLR)对非线性动力学进行线性化,并在每次迭代中使用P-GVIMP求解线性化后的系统。损失函数通常包含控制成本、状态成本和终端成本。
🖼️ 关键图片
📊 实验亮点
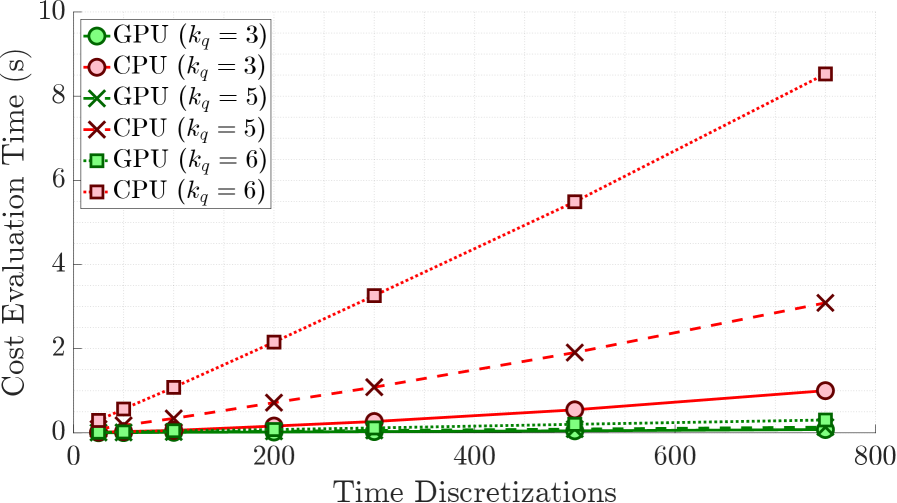
实验结果表明,所提出的P-GVIMP算法在各种机器人系统上实现了显著的加速。例如,在某个实验中,P-GVIMP算法比传统的基于采样的算法快几个数量级。此外,该算法还成功解决了不确定性下的非线性系统的规划问题,验证了其在复杂环境下的适用性。开源代码的发布也为其他研究者提供了便利。
🎯 应用场景
该研究成果可应用于各种需要在不确定性环境下进行运动规划的机器人系统,例如自动驾驶、无人机、移动机器人等。尤其是在需要快速响应和处理复杂环境的场景下,该方法具有重要的应用价值。未来的研究可以进一步探索该方法在更复杂的环境和任务中的应用,例如多机器人协同、动态环境下的规划等。
📄 摘要(原文)
We cast motion planning under uncertainty as a stochastic optimal control problem, where the optimal posterior distribution has an explicit form. To approximate this posterior, this work frames an optimization problem in the space of Gaussian distributions by solving a Variational Inference (VI) in the path distribution space. For linear-Gaussian stochastic dynamics, a proximal algorithm is proposed to solve for an optimal Gaussian proposal iteratively. The computational bottleneck is evaluating the gradients with respect to the proposal over a dense trajectory. To tackle this issue, the sparse planning factor graph and Gaussian Belief Propagation (GBP) are exploited, allowing for parallel computation of these gradients on Graphics Processing Units (GPUs). We term the novel paradigm the \textit{Parallel Gaussian Variational Inference Motion Planning (P-GVIMP)}. Building on the efficient algorithm for linear Gaussian systems, we then propose an iterative paradigm based on Statistical Linear Regression (SLR) techniques to solve planning problems for nonlinear stochastic systems, where the P-GVIMP serves as a sub-routine for the linearized time-varying system at each iteration. The proposed framework is validated on various robotic systems, demonstrating significant speed acceleration achieved by leveraging parallel computation and successful planning solutions for nonlinear systems under uncertainty. An open-sourced implementation is presented at \href{https://github.com/hzyu17/VIMP}{https://github.com/hzyu17/VIMP}.