Energy Consumption in Robotics: A Simplified Modeling Approach
作者: Valentyn Petrichenko, Lisa Lokstein, Gregor Thiele, Kevin Haninger
分类: cs.RO
发布日期: 2024-11-05
备注: 5 pages
💡 一句话要点
提出一种简化的机器人能耗建模方法,用于轨迹优化
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人能耗 轨迹优化 逆动力学 ROS 能源效率 协作机器人 模型简化
📋 核心要点
- 现有机器人轨迹优化方法模型复杂,难以与工业规划工具集成,限制了其在实际应用中的效果。
- 该论文提出一种简化的机器人能耗建模方法,利用可微惯性和运动学模型,并集成到ROS规划流程中。
- 实验表明,简化的惯性与电气模型在协作机器人上具有竞争力,且更易于部署。
📝 摘要(中文)
机器人的能量消耗与轨迹密切相关,因此可以通过优化轨迹来降低能耗。现有的机器人轨迹优化方法在固定起点和终点的情况下,最多可降低15%的能量消耗,但由于模型复杂且缺乏与规划工具的集成(例如避障),它们在工业机器人规划中的应用仍然受到限制。我们提出了一种方法,该方法利用标准开源工具中的可微惯性和运动学模型,并与标准的ROS规划方法集成。基于逆动力学的能量模型可以选择性地扩展为单参数电气模型,从而简化模型识别过程。我们在一款协作机器人上比较了惯性模型和电气模型,结果表明,简化的模型提供了具有竞争力的精度,并且在实践中更容易部署。
🔬 方法详解
问题定义:论文旨在解决机器人轨迹优化中能耗建模复杂、难以集成到现有工业规划流程的问题。现有方法通常依赖复杂的机器人动力学模型,模型参数辨识困难,且与避障等其他规划目标难以协同优化。这限制了轨迹优化在降低机器人能耗方面的潜力。
核心思路:论文的核心思路是简化机器人能耗模型,使其易于辨识和集成到现有的机器人规划框架中。通过使用标准开源工具中的可微惯性和运动学模型,并可选地添加一个单参数电气模型,降低了模型的复杂性,同时保持了足够的精度。
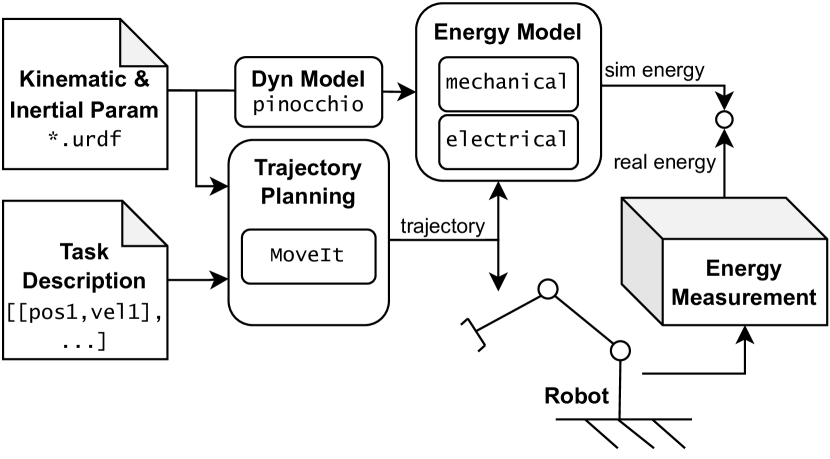
技术框架:该方法的技术框架主要包含以下几个步骤:1) 利用标准开源工具(如ROS)获取机器人的惯性和运动学模型。2) 基于逆动力学计算机器人关节的力矩。3) 使用力矩计算机器人的能量消耗。4) 可选地,添加一个单参数电气模型来进一步提高精度。5) 将该能耗模型集成到现有的机器人规划框架中,例如ROS的MoveIt!,用于轨迹优化。
关键创新:该论文的关键创新在于提出了一个简化的机器人能耗模型,该模型易于辨识和集成到现有的机器人规划框架中。与现有方法相比,该方法降低了模型的复杂性,同时保持了足够的精度。此外,该方法还利用了标准开源工具,使得其易于部署和使用。
关键设计:论文的关键设计包括:1) 使用可微的惯性和运动学模型,以便于进行轨迹优化。2) 使用逆动力学计算机器人关节的力矩。3) 可选地,添加一个单参数电气模型,该模型将电机的效率考虑在内。4) 将能耗模型集成到ROS的MoveIt!中,使用现有的轨迹优化算法进行优化。论文中没有明确提及具体的损失函数或网络结构,但强调了模型参数的简化,例如电气模型仅使用单个参数。
🖼️ 关键图片

📊 实验亮点
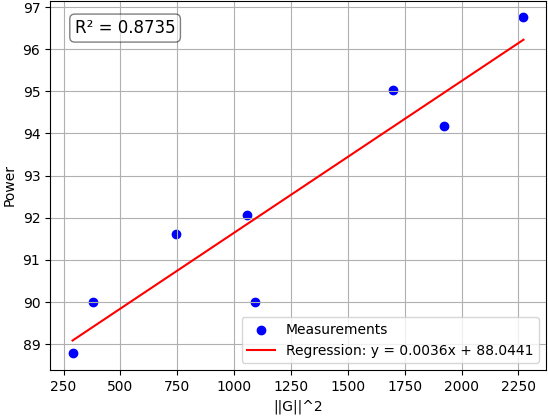
论文在一款协作机器人上进行了实验,比较了简化的惯性模型和电气模型的性能。实验结果表明,简化的模型提供了具有竞争力的精度,并且在实践中更容易部署。虽然论文摘要中没有给出具体的性能数据和提升幅度,但强调了简化模型在易用性方面的优势。
🎯 应用场景
该研究成果可应用于工业机器人、协作机器人等领域,通过优化机器人轨迹,降低能量消耗,提高生产效率,并减少碳排放。该方法易于集成到现有的机器人规划框架中,具有广泛的应用前景。未来可进一步研究更精确的能耗模型,并将其应用于更复杂的机器人任务中。
📄 摘要(原文)
The energy use of a robot is trajectory-dependent, and thus can be reduced by optimization of the trajectory. Current methods for robot trajectory optimization can reduce energy up to 15\% for fixed start and end points, however their use in industrial robot planning is still restricted due to model complexity and lack of integration with planning tools which address other concerns (e.g. collision avoidance). We propose an approach that uses differentiable inertial and kinematic models from standard open-source tools, integrating with standard ROS planning methods. An inverse dynamics-based energy model is optionally extended with a single-parameter electrical model, simplifying the model identification process. We compare the inertial and electrical models on a collaborative robot, showing that simplified models provide competitive accuracy and are easier to deploy in practice.