Digitizing Touch with an Artificial Multimodal Fingertip
作者: Mike Lambeta, Tingfan Wu, Ali Sengul, Victoria Rose Most, Nolan Black, Kevin Sawyer, Romeo Mercado, Haozhi Qi, Alexander Sohn, Byron Taylor, Norb Tydingco, Gregg Kammerer, Dave Stroud, Jake Khatha, Kurt Jenkins, Kyle Most, Neal Stein, Ricardo Chavira, Thomas Craven-Bartle, Eric Sanchez, Yitian Ding, Jitendra Malik, Roberto Calandra
分类: cs.RO, cs.AI, cs.LG
发布日期: 2024-11-04
备注: 28 pages
💡 一句话要点
提出一种高分辨率多模态人工指尖,用于数字化触觉感知。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 触觉感知 人工指尖 多模态传感 高分辨率 片上AI
📋 核心要点
- 现有触觉感知系统缺乏高分辨率、多模态的感知能力,限制了机器人与环境交互的丰富性和准确性。
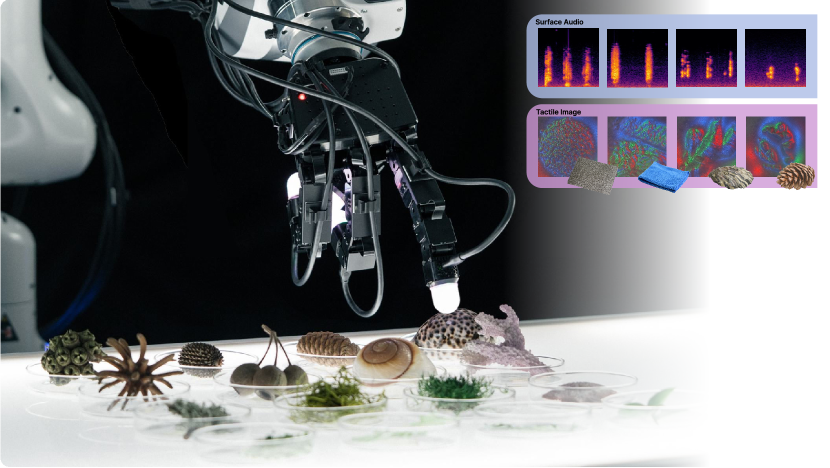
- 设计了一种人工指尖,集成了高分辨率触觉传感器、多模态信号采集和片上AI处理,模拟人类触觉感知。
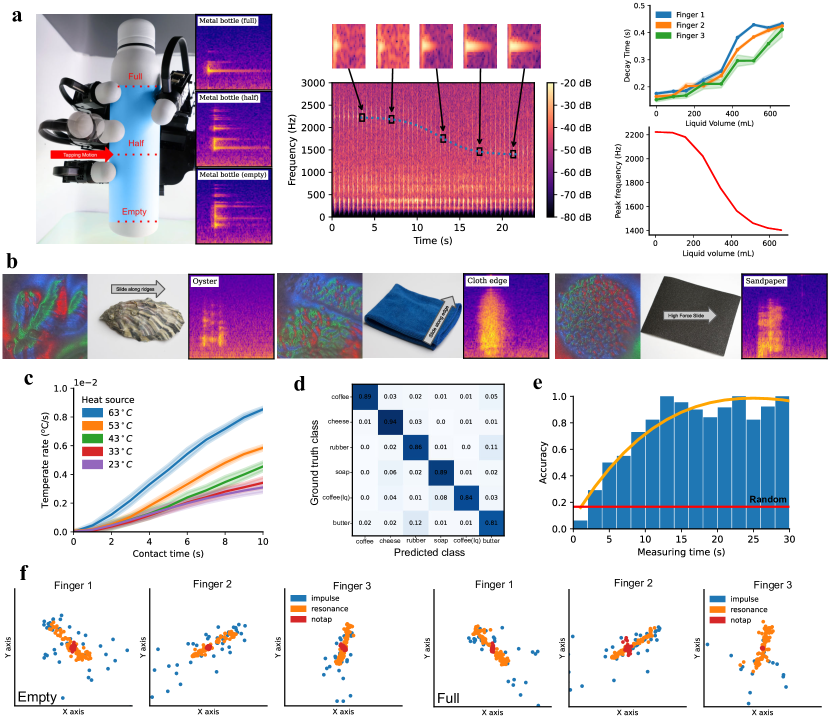
- 实验证明该指尖在空间分辨率、力觉感知、振动感知等方面具有优异性能,并具备感知热量和气味的能力。
📝 摘要(中文)
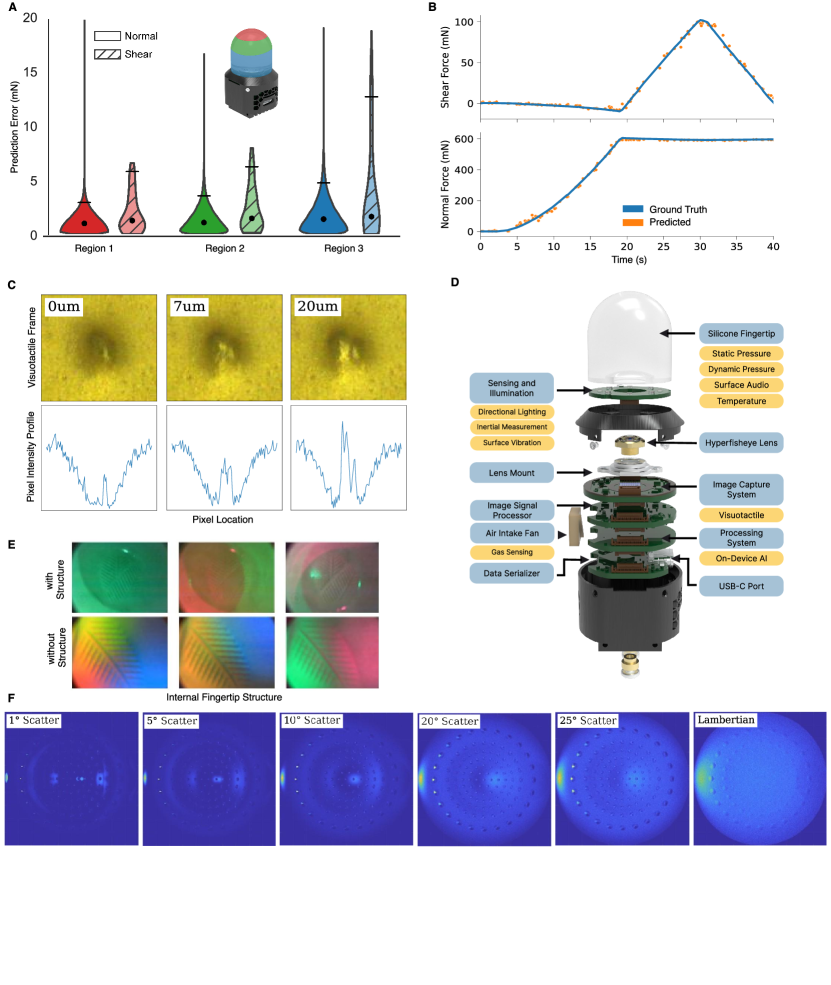
触觉是一种重要的感知方式,能够提供关于物体属性和与物理环境交互的丰富信息。人类和机器人都可以通过触觉来感知周围环境并与之交互。然而,目前还没有任何系统能够通过半球形柔顺的实体提供丰富、多模态的数字触觉感知能力。本文介绍了几项改进触觉数字化的概念和技术创新。这些进步体现在一种具有先进感知能力的人工手指形状的传感器中。值得注意的是,该指尖包含高分辨率传感器(约830万个触觉像素),可以响应全向触摸,捕获多模态信号,并使用设备上的人工智能实时处理数据。评估表明,该人工指尖可以分辨小至7微米的空间特征,以1.01 mN和1.27 mN的分辨率感知法向力和剪切力,感知高达10 kHz的振动,感知热量,甚至感知气味。此外,它还嵌入了一个设备上的人工智能神经网络加速器,作为机器人上的外围神经系统,并模仿人类的反射弧。这些结果证明了以超人的性能数字化触觉的可能性。其意义深远,我们预计在机器人(工业、医疗、农业和消费级)、虚拟现实和远程呈现、假肢和电子商务等领域具有潜在的应用。为了大规模地数字化触觉,我们开源了一个模块化平台,以促进未来对触觉本质的研究。
🔬 方法详解
问题定义:现有机器人触觉感知系统通常分辨率低、模态单一,难以提供足够丰富的触觉信息,限制了机器人在复杂环境中的操作能力。现有方法在感知微小物体、精确力控制、快速振动响应等方面存在明显不足。
核心思路:论文的核心思路是模仿人类指尖的结构和功能,设计一种高分辨率、多模态的人工指尖,并通过片上AI进行实时数据处理,实现超人的触觉感知能力。这种设计旨在克服现有触觉传感器的局限性,为机器人提供更接近人类的触觉体验。
技术框架:该人工指尖包含以下主要模块:1) 高分辨率触觉传感器阵列(约830万个触觉像素),用于感知压力分布;2) 力传感器,用于测量法向力和剪切力;3) 振动传感器,用于感知高频振动;4) 温度传感器,用于感知温度变化;5) 气味传感器,用于感知气味;6) 片上AI神经网络加速器,用于实时处理传感器数据,模拟人类的反射弧。整个系统通过集成这些模块,实现多模态触觉感知。
关键创新:该论文最重要的技术创新点在于集成了高分辨率触觉传感器、多模态信号采集和片上AI处理于一体,实现了超人的触觉感知能力。与现有方法相比,该人工指尖具有更高的空间分辨率、更精确的力觉感知、更快的振动响应,并且能够感知热量和气味。片上AI加速器的使用,使得数据处理更加高效,响应更加迅速。
关键设计:高分辨率触觉传感器阵列的设计是关键。论文中提到传感器数量达到了830万个,这保证了极高的空间分辨率。此外,片上AI神经网络加速器的具体网络结构和训练方法未知,但其目的是模拟人类的反射弧,实现快速的触觉反馈。力传感器的分辨率达到了1.01 mN和1.27 mN,保证了精确的力觉感知。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该人工指尖可以分辨小至7微米的空间特征,以1.01 mN和1.27 mN的分辨率感知法向力和剪切力,感知高达10 kHz的振动。这些性能指标远超现有触觉传感器,证明了该人工指尖具有超人的触觉感知能力。此外,该指尖还能够感知热量和气味,进一步丰富了触觉感知的维度。
🎯 应用场景
该研究成果在机器人领域具有广泛的应用前景,包括工业自动化、医疗机器人、农业机器人和服务机器人等。此外,该技术还可以应用于虚拟现实和远程呈现,增强用户体验。在假肢领域,该人工指尖可以为残疾人提供更自然、更灵敏的触觉反馈。电子商务领域可以通过触觉感知技术,让用户在线体验商品的质感。
📄 摘要(原文)
Touch is a crucial sensing modality that provides rich information about object properties and interactions with the physical environment. Humans and robots both benefit from using touch to perceive and interact with the surrounding environment (Johansson and Flanagan, 2009; Li et al., 2020; Calandra et al., 2017). However, no existing systems provide rich, multi-modal digital touch-sensing capabilities through a hemispherical compliant embodiment. Here, we describe several conceptual and technological innovations to improve the digitization of touch. These advances are embodied in an artificial finger-shaped sensor with advanced sensing capabilities. Significantly, this fingertip contains high-resolution sensors (~8.3 million taxels) that respond to omnidirectional touch, capture multi-modal signals, and use on-device artificial intelligence to process the data in real time. Evaluations show that the artificial fingertip can resolve spatial features as small as 7 um, sense normal and shear forces with a resolution of 1.01 mN and 1.27 mN, respectively, perceive vibrations up to 10 kHz, sense heat, and even sense odor. Furthermore, it embeds an on-device AI neural network accelerator that acts as a peripheral nervous system on a robot and mimics the reflex arc found in humans. These results demonstrate the possibility of digitizing touch with superhuman performance. The implications are profound, and we anticipate potential applications in robotics (industrial, medical, agricultural, and consumer-level), virtual reality and telepresence, prosthetics, and e-commerce. Toward digitizing touch at scale, we open-source a modular platform to facilitate future research on the nature of touch.