Tiny Learning-Based MPC for Multirotors: Solver-Aware Learning for Efficient Embedded Predictive Control
作者: Babak Akbari, Justin Frank, Melissa Greeff
分类: cs.RO, eess.SY
发布日期: 2024-10-31 (更新: 2025-10-15)
💡 一句话要点
提出Tiny LB MPC以解决微型多旋翼控制挑战
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 微型无人机 模型预测控制 基于学习的控制 动态模型学习 实时控制 优化求解器 环境监测 搜救任务
📋 核心要点
- 微型无人机在控制方面面临计算能力和动态模型准确性不足的挑战。
- 提出Tiny LB MPC,通过优化求解器和MPC框架的协同设计,适应资源受限的微型多旋翼平台。
- 在Crazyflie 2.1上实现100 Hz控制,跟踪性能较现有方法提升43%,首次在轻量级多旋翼上实现基于学习的MPC。
📝 摘要(中文)
微型无人机在环境监测和搜救等应用中具有巨大潜力,但由于有限的计算能力和非线性动态,面临显著的控制挑战。模型预测控制(MPC)能够实现灵活的轨迹跟踪和约束处理,但依赖于准确的动态模型。现有的基于学习的MPC方法(如高斯过程MPC)通过学习残差动态来提升性能,但其高计算成本限制了在微型机器人上的应用。本文提出了Tiny LB MPC,一个为资源受限的微型多旋翼平台设计的MPC框架和优化求解器。该方法在配备Teensy 4.0微控制器的Crazyflie 2.1上实现了100 Hz的控制,在模型不确定性下,跟踪性能较现有嵌入式MPC方法平均提升43%,并实现了53克多旋翼上的首次基于学习的MPC的在线应用。
🔬 方法详解
问题定义:本文旨在解决微型多旋翼无人机在控制过程中由于计算资源有限和动态模型不准确而导致的性能瓶颈。现有的基于学习的MPC方法虽然能提升控制性能,但其高计算成本使其难以在微型平台上部署。
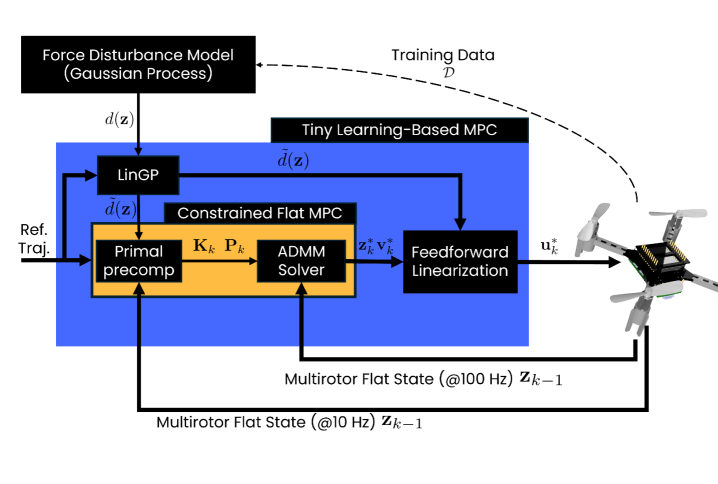
核心思路:Tiny LB MPC通过将MPC框架与优化求解器进行协同设计,降低了计算复杂度,使其能够在资源受限的环境中高效运行。该方法通过学习动态残差来提高控制精度,同时保持实时性。
技术框架:该方法的整体架构包括动态模型学习模块、MPC控制器和优化求解器。动态模型学习模块负责实时更新系统的动态特性,MPC控制器则基于当前状态和预测模型生成控制指令,优化求解器确保在给定的计算资源下快速求解控制问题。
关键创新:Tiny LB MPC的主要创新在于其高效的求解策略和动态模型的自适应学习能力,使得在微型平台上实现高频控制成为可能。这一设计显著降低了计算负担,与传统的基于学习的MPC方法相比,具有更好的实时性能。
关键设计:在设计中,采用了轻量级的神经网络结构来近似动态模型,并通过自适应损失函数来优化学习过程。此外,优化求解器的参数设置经过精心调整,以确保在100 Hz的控制频率下仍能保持高效的计算性能。
🖼️ 关键图片

📊 实验亮点
实验结果显示,Tiny LB MPC在Crazyflie 2.1平台上实现了100 Hz的控制频率,相较于现有嵌入式MPC方法,跟踪性能平均提升了43%。这一成果标志着在53克多旋翼上首次成功实现基于学习的MPC,具有重要的实际意义。
🎯 应用场景
该研究的潜在应用领域包括环境监测、搜救任务和农业监控等场景。Tiny LB MPC的高效控制能力使得微型无人机能够在复杂环境中执行任务,提升了其在实际应用中的可行性和可靠性。未来,该技术可能推动微型无人机在更多领域的广泛应用,促进智能化和自动化的发展。
📄 摘要(原文)
Tiny aerial robots hold great promise for applications such as environmental monitoring and search-and-rescue, yet face significant control challenges due to limited onboard computing power and nonlinear dynamics. Model Predictive Control (MPC) enables agile trajectory tracking and constraint handling but depends on an accurate dynamics model. While existing Learning-Based (LB) MPC methods, such as Gaussian Process (GP) MPC, enhance performance by learning residual dynamics, their high computational cost restricts onboard deployment on tiny robots. This paper introduces Tiny LB MPC, a co-designed MPC framework and optimization solver for resource-constrained micro multirotor platforms. The proposed approach achieves 100 Hz control on a Crazyflie 2.1 equipped with a Teensy 4.0 microcontroller, demonstrating a 43% average improvement in tracking performance over existing embedded MPC methods under model uncertainty, and achieving the first onboard implementation of LB MPC on a 53 g multirotor.