CaStL: Constraints as Specifications through LLM Translation for Long-Horizon Task and Motion Planning
作者: Weihang Guo, Zachary Kingston, Lydia E. Kavraki
分类: cs.RO
发布日期: 2024-10-29
💡 一句话要点
CaStL:利用LLM翻译约束条件为规范,解决长时程任务与运动规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 任务与运动规划 大型语言模型 自然语言处理 约束求解 规划领域定义语言
📋 核心要点
- 现实世界的任务规划问题通常包含复杂的约束条件,而现有方法难以有效处理自然语言描述中的这些约束。
- CaStL框架通过LLM将自然语言约束转化为形式化规范(PDDL和Python脚本),从而实现对复杂约束的有效处理。
- 实验结果表明,CaStL在多个PDDL领域显著提高了从自然语言规范进行约束处理和规划的成功率。
📝 摘要(中文)
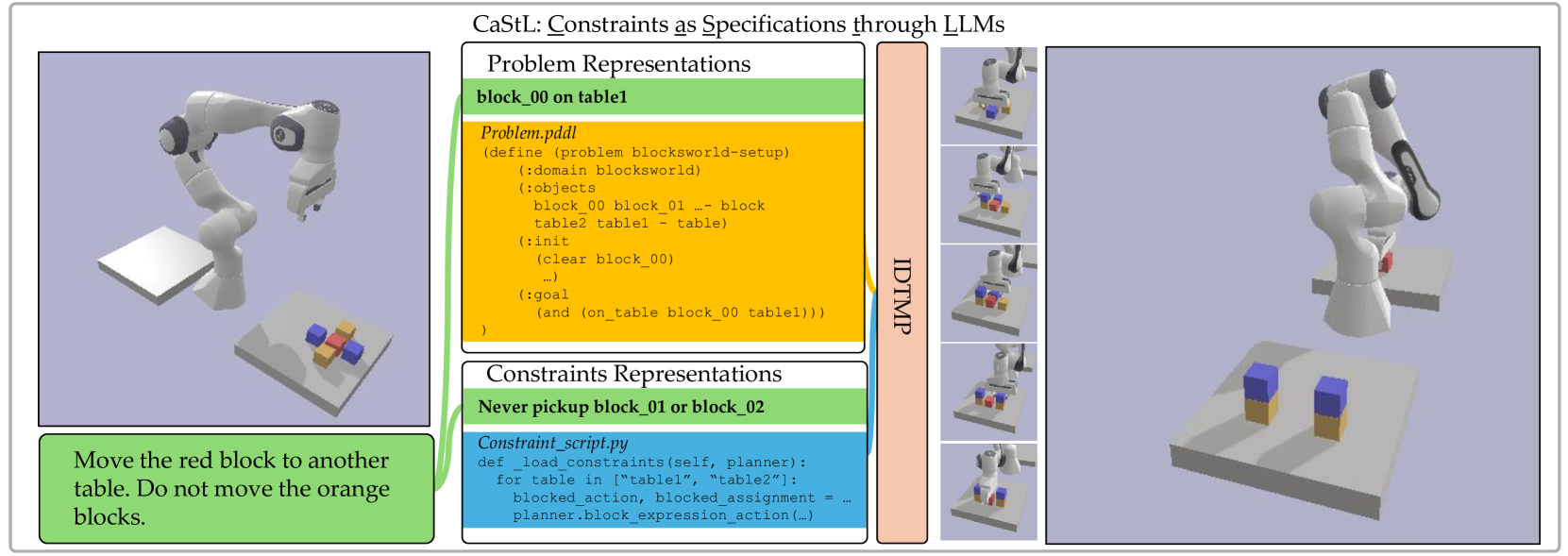
大型语言模型(LLMs)在长时程任务与运动规划(TAMP)中展现了卓越的能力,它们可以将清晰直观的自然语言问题转化为形式化规范,例如规划领域定义语言(PDDL)。然而,现实世界的问题往往是模糊的,并且涉及许多复杂的约束。本文介绍了一个名为“通过LLMs将约束作为规范”(CaStL)的框架,该框架通过多阶段从自然语言中识别约束,例如目标条件、动作排序和动作阻塞。CaStL将这些约束转换为PDDL和Python脚本,并使用自定义的PDDL求解器进行求解。在三个PDDL领域进行的测试表明,CaStL显著提高了复杂场景中从自然语言规范处理约束和规划的成功率。
🔬 方法详解
问题定义:论文旨在解决长时程任务与运动规划(TAMP)中,如何从自然语言描述中提取并处理复杂约束的问题。现有方法在处理模糊、多约束的现实世界问题时,难以准确理解和形式化自然语言中的约束条件,导致规划成功率低。
核心思路:CaStL的核心思路是利用大型语言模型(LLMs)的强大自然语言理解能力,将自然语言描述的约束条件转化为形式化的规范,例如PDDL和Python脚本。通过将约束显式地表示出来,可以更好地指导规划过程,提高规划的成功率。
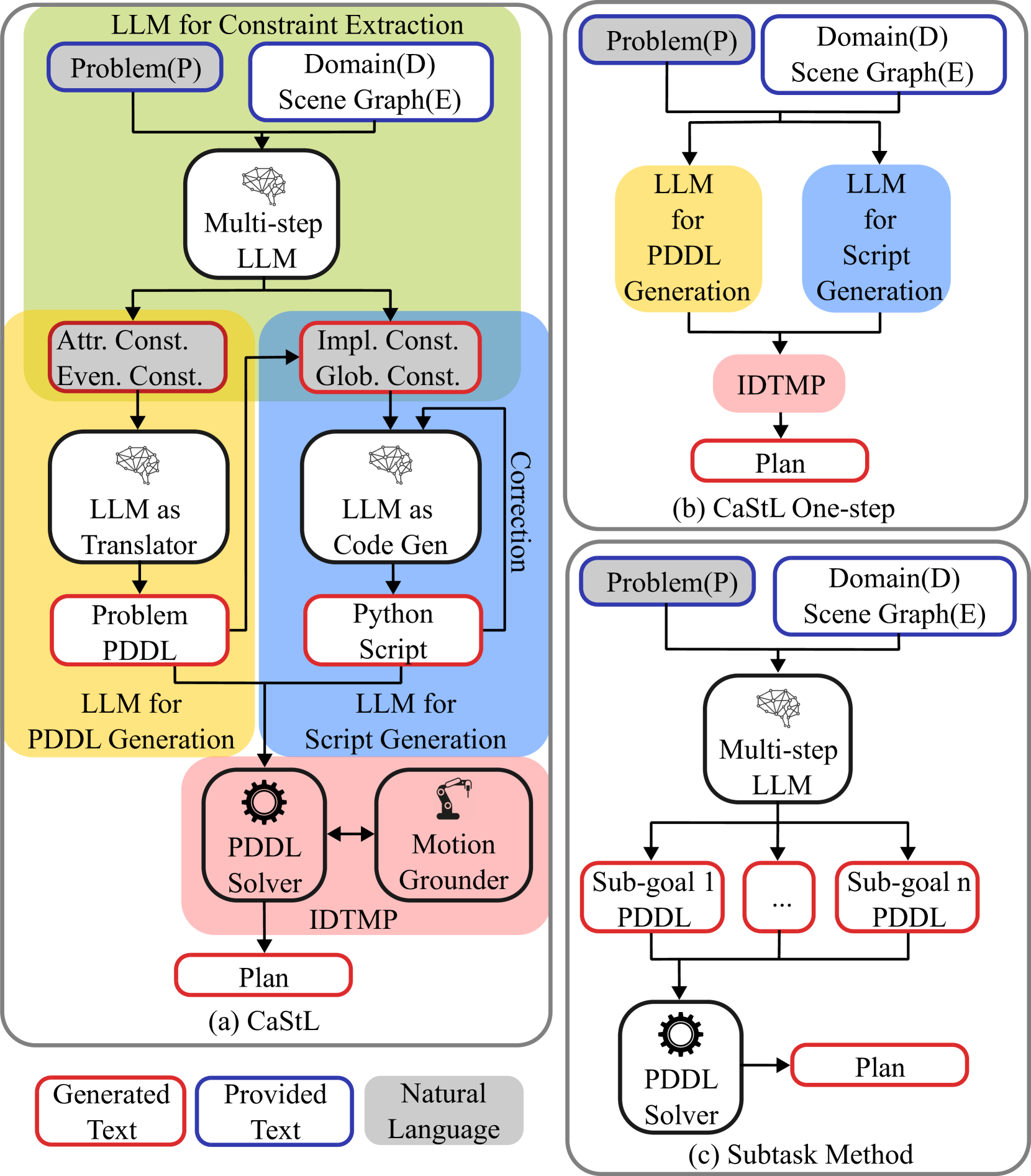
技术框架:CaStL框架包含以下主要阶段:1) 约束识别:使用LLM从自然语言描述中识别出目标条件、动作排序、动作阻塞等约束;2) 约束转换:将识别出的约束转化为PDDL和Python脚本;3) 规划求解:使用自定义的PDDL求解器,结合转化后的约束条件,进行任务与运动规划。整体流程是从自然语言输入到形式化约束,再到规划求解的过程。
关键创新:CaStL的关键创新在于利用LLM进行多阶段的约束识别和转换,从而能够处理更复杂、更细粒度的约束条件。与直接将自然语言转化为PDDL相比,CaStL显式地提取和表示约束,使得规划过程更加可控和可解释。
关键设计:论文中使用了特定的LLM模型(具体模型名称未知)进行约束识别和转换,并设计了相应的prompt工程(具体prompt设计未知)以提高LLM的性能。此外,自定义的PDDL求解器(具体实现细节未知)也针对特定领域的约束进行了优化。
🖼️ 关键图片
📊 实验亮点
实验结果表明,CaStL在三个PDDL领域显著提高了从自然语言规范处理约束和规划的成功率。具体提升幅度和对比基线在摘要中未明确给出,但强调了CaStL在复杂场景下的优势。未来的研究可以进一步量化CaStL的性能提升,并与其他方法进行更详细的比较。
🎯 应用场景
CaStL框架可应用于机器人任务规划、智能家居控制、自动驾驶等领域。通过将自然语言指令转化为形式化规范,可以使机器人或智能系统更好地理解用户的意图,并执行复杂的任务。该研究有助于提高人机交互的自然性和智能化水平,推动智能系统的广泛应用。
📄 摘要(原文)
Large Language Models (LLMs) have demonstrated remarkable ability in long-horizon Task and Motion Planning (TAMP) by translating clear and straightforward natural language problems into formal specifications such as the Planning Domain Definition Language (PDDL). However, real-world problems are often ambiguous and involve many complex constraints. In this paper, we introduce Constraints as Specifications through LLMs (CaStL), a framework that identifies constraints such as goal conditions, action ordering, and action blocking from natural language in multiple stages. CaStL translates these constraints into PDDL and Python scripts, which are solved using an custom PDDL solver. Tested across three PDDL domains, CaStL significantly improves constraint handling and planning success rates from natural language specification in complex scenarios.