On the Synthesis of Reactive Collision-Free Whole-Body Robot Motions: A Complementarity-based Approach
作者: Haowen Yao, Riddhiman Laha, Anirban Sinha, Jonas Hall, Luis F. C. Figueredo, Nilanjan Chakraborty, Sami Haddadin
分类: cs.RO
发布日期: 2024-10-29
💡 一句话要点
提出FLIQC:一种基于互补约束的快速全身机器人反应式避碰运动规划器
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion) 支柱五:交互与反应 (Interaction & Reaction)
关键词: 运动规划 碰撞避免 互补约束 协作机器人 实时控制
📋 核心要点
- 现有基于优化的运动规划方法在处理复杂环境下的全身避障时,面临非凸性和实时性挑战。
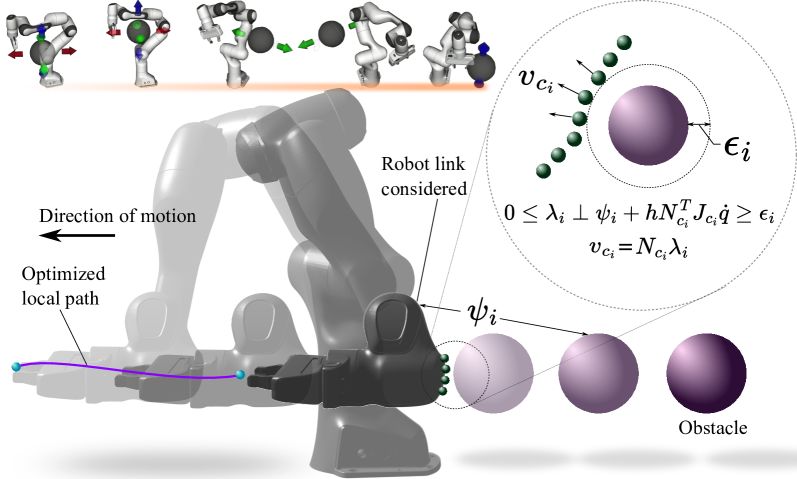
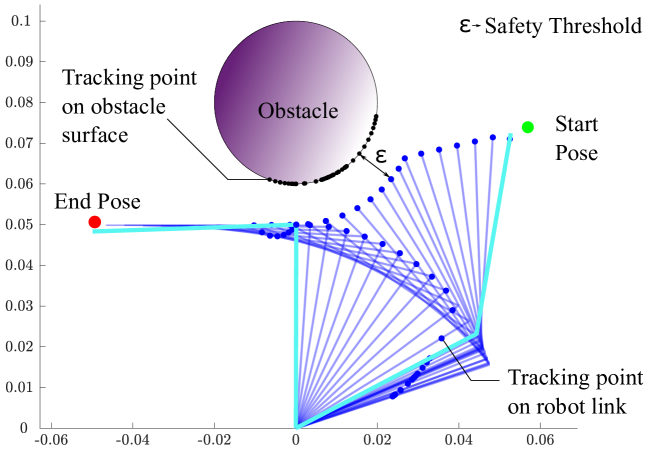
- FLIQC运动规划器利用互补约束,提出了一种新颖的运动模型,能够同时考虑机器人和障碍物的几何形状,确保无碰撞。
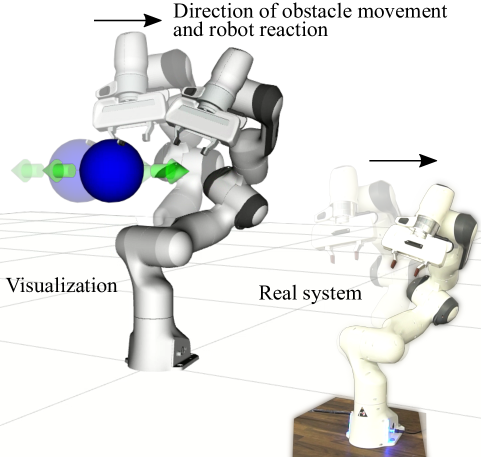
- 实验结果表明,FLIQC在性能上优于现有技术,能够在1kHz频率下为协作机器人生成连续且反应式的运动规划。
📝 摘要(中文)
本文提出了一种针对高自由度机器人系统的运动规划方法,该方法考虑了整个机器人身体的碰撞。特别地,一类带有互补约束的数学规划在此变得有用。基于优化的规划器可以处理受限空间内的轨迹规划,同时考虑到机器人的约束。然而,在这种设置中引入障碍物会将公式转换为非凸问题(通常带有病态的双线性约束),这在实时环境中并非易事。为此,我们提出了FLIQC(基于快速线性二次互补的)运动规划器。我们的规划器采用了一种新颖的运动模型,该模型捕获了整个刚性机器人以及障碍物几何形状,并确保由于施加的约束而使表面之间不发生穿透。我们与最先进的技术进行了彻底的比较研究,证明了性能的提高。广泛的仿真和硬件实验验证了我们以1 kHz的频率为具有恒定最小参数的现代协作机器人生成连续和反应式运动计划的主张。
🔬 方法详解
问题定义:论文旨在解决高自由度机器人在复杂环境中进行全身避障运动规划的问题。现有方法在处理此类问题时,由于引入障碍物导致优化问题变为非凸,计算复杂度高,难以满足实时性要求,尤其是在协作机器人等对响应速度有较高要求的场景下。此外,现有方法在建模机器人和环境时,可能无法精确捕捉其几何形状,导致碰撞检测不准确。
核心思路:论文的核心思路是利用互补约束(Complementarity Constraints)将非凸的避障问题转化为线性或二次规划问题,从而降低计算复杂度,提高求解速度。通过精心设计的运动模型,同时考虑机器人和障碍物的几何形状,确保运动规划的安全性。FLIQC的关键在于将复杂的碰撞避免问题转化为一系列易于求解的线性或二次互补问题。
技术框架:FLIQC运动规划器的整体框架包括以下几个主要步骤:1) 建立机器人和环境的几何模型,精确描述其形状和位置;2) 基于互补约束构建优化问题,目标是生成平滑的运动轨迹,同时满足避障约束;3) 利用快速的线性或二次规划求解器求解优化问题,得到机器人的运动指令;4) 将运动指令发送给机器人控制器,实现机器人的运动。整个过程需要循环执行,以实现实时的反应式避障。
关键创新:FLIQC最重要的技术创新点在于其基于互补约束的运动模型。该模型能够将非凸的避障问题转化为易于求解的线性或二次规划问题,从而显著提高了运动规划的速度。此外,FLIQC的运动模型能够精确捕捉机器人和障碍物的几何形状,提高了碰撞检测的准确性。与传统方法相比,FLIQC在保证安全性的前提下,实现了更高的运动规划效率。
关键设计:FLIQC的关键设计包括:1) 互补约束的具体形式,需要根据机器人和环境的几何形状进行设计,以确保避障约束的有效性;2) 优化问题的目标函数,需要综合考虑运动轨迹的平滑性、运动速度和加速度等因素;3) 线性或二次规划求解器的选择,需要根据问题的规模和实时性要求进行选择;4) 运动模型的参数设置,需要根据机器人和环境的特性进行调整,以提高碰撞检测的准确性。
🖼️ 关键图片
📊 实验亮点
实验结果表明,FLIQC在运动规划速度和安全性方面均优于现有技术。与最先进的方法相比,FLIQC能够在1kHz的频率下为协作机器人生成连续且反应式的运动规划,同时保证了运动轨迹的安全性。仿真和硬件实验验证了FLIQC在复杂环境下的有效性,证明了其在实际应用中的潜力。
🎯 应用场景
该研究成果可广泛应用于协作机器人、自动驾驶、医疗机器人等领域。在协作机器人领域,FLIQC能够帮助机器人在复杂环境中安全高效地完成任务。在自动驾驶领域,FLIQC可以用于车辆的实时避障和路径规划。在医疗机器人领域,FLIQC可以用于手术机器人的精确操作和安全避障。未来,该技术有望进一步发展,实现更智能、更安全的机器人运动规划。
📄 摘要(原文)
This paper is about generating motion plans for high degree-of-freedom systems that account for collisions along the entire body. A particular class of mathematical programs with complementarity constraints become useful in this regard. Optimization-based planners can tackle confined-space trajectory planning while being cognizant of robot constraints. However, introducing obstacles in this setting transforms the formulation into a non-convex problem (oftentimes with ill-posed bilinear constraints), which is non-trivial in a real-time setting. To this end, we present the FLIQC (Fast LInear Quadratic Complementarity based) motion planner. Our planner employs a novel motion model that captures the entire rigid robot as well as the obstacle geometry and ensures non-penetration between the surfaces due to the imposed constraint. We perform thorough comparative studies with the state-of-the-art, which demonstrate improved performance. Extensive simulation and hardware experiments validate our claim of generating continuous and reactive motion plans at 1 kHz for modern collaborative robots with constant minimal parameters.