HOVER: Versatile Neural Whole-Body Controller for Humanoid Robots
作者: Tairan He, Wenli Xiao, Toru Lin, Zhengyi Luo, Zhenjia Xu, Zhenyu Jiang, Jan Kautz, Changliu Liu, Guanya Shi, Xiaolong Wang, Linxi Fan, Yuke Zhu
分类: cs.RO
发布日期: 2024-10-28 (更新: 2025-03-06)
备注: Published at ICRA 2025, Project Page: see https://hover-versatile-humanoid.github.io/
💡 一句话要点
HOVER:用于人形机器人的通用神经全身控制器
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 人形机器人控制 全身控制 运动模仿 策略蒸馏 多模式学习
📋 核心要点
- 现有的人形机器人全身控制方法难以兼顾导航、操作等多种任务,且针对特定任务训练的策略泛化性差。
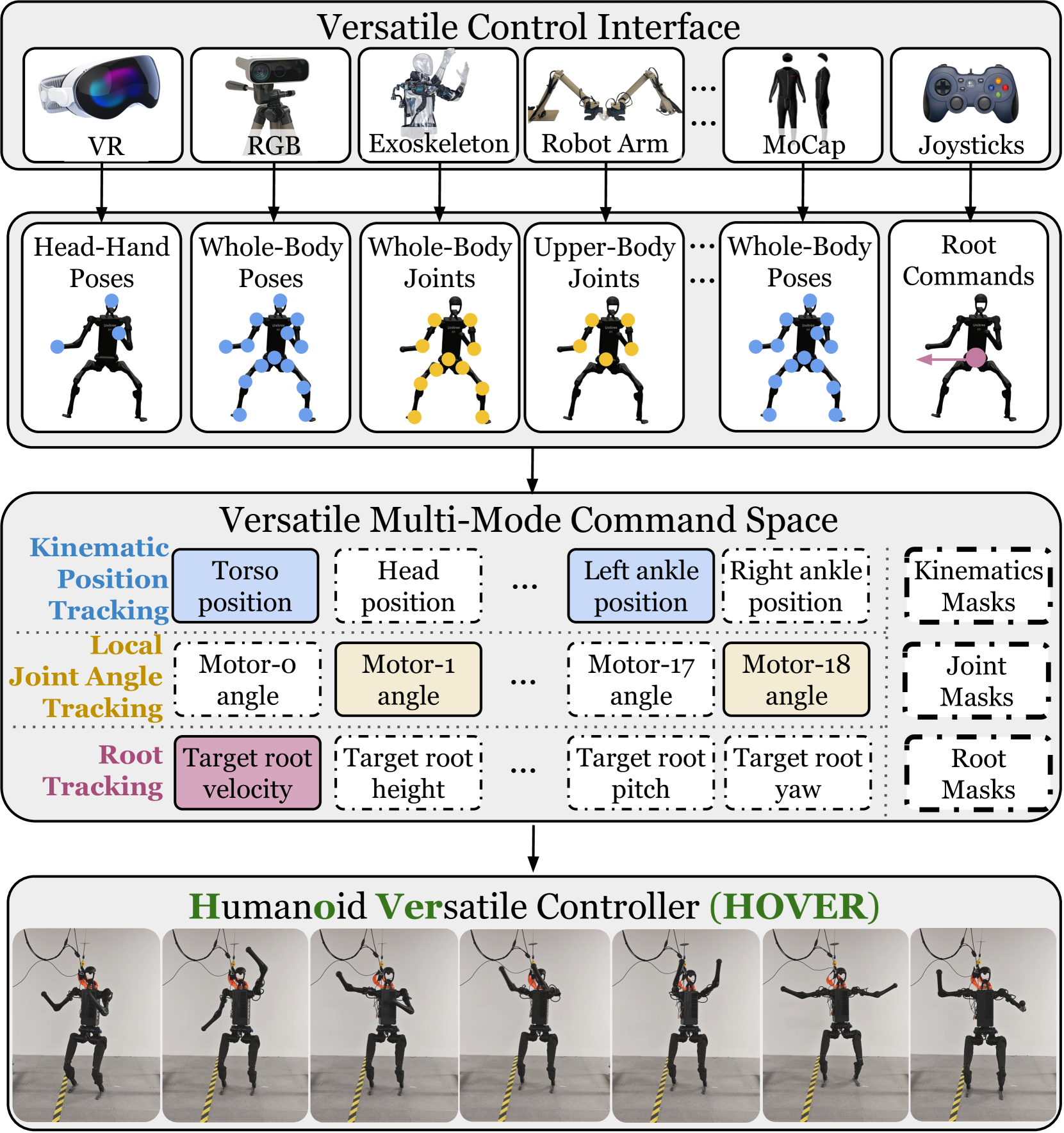
- HOVER通过全身运动学模仿作为通用抽象,将多种控制模式整合到统一策略中,实现不同模式间的无缝切换。
- HOVER无需为每种控制模式重新训练策略,提高了效率和灵活性,为人形机器人应用提供了更通用的解决方案。
📝 摘要(中文)
人形机器人全身控制需要适应导航、人机协同操作和桌面操作等多种任务,每种任务都需要不同的控制模式。例如,导航依赖于根速度跟踪,而桌面操作优先考虑上半身关节角度跟踪。现有的方法通常训练针对特定命令空间的单独策略,限制了它们在模式之间的可转移性。我们提出了一个关键的见解,即全身运动学运动模仿可以作为所有这些任务的通用抽象,并为学习多种全身控制模式提供通用的运动技能。在此基础上,我们提出了HOVER(Humanoid Versatile Controller),一个多模式策略蒸馏框架,将不同的控制模式整合到一个统一的策略中。HOVER能够在控制模式之间实现无缝转换,同时保留每种模式的独特优势,为各种模式下的人形机器人控制提供了一个稳健且可扩展的解决方案。通过消除为每种控制模式重新训练策略的需求,我们的方法提高了未来人形机器人应用的效率和灵活性。
🔬 方法详解
问题定义:现有的人形机器人全身控制方法通常针对特定任务(如导航、操作)训练独立的策略。这种方式导致策略的泛化能力不足,难以在不同任务之间切换。此外,为每种控制模式单独训练策略效率低下,限制了人形机器人在复杂环境中的应用。
核心思路:HOVER的核心思路是将全身运动学运动模仿作为所有任务的通用抽象。通过模仿人类的全身运动,机器人可以学习到通用的运动技能,从而适应不同的控制模式。这种方法避免了为每种任务单独设计策略的需要,提高了策略的泛化性和效率。
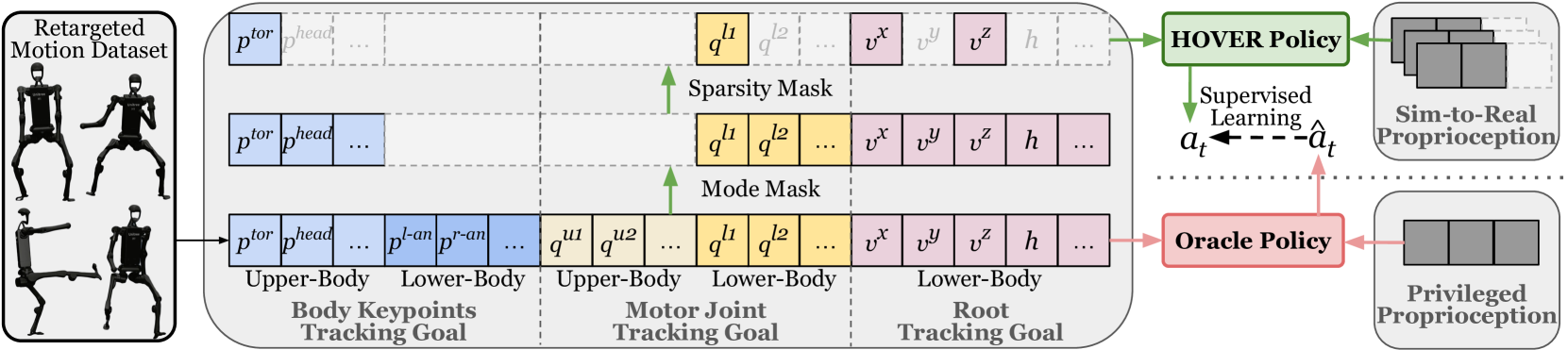
技术框架:HOVER采用多模式策略蒸馏框架。首先,针对不同的控制模式(如导航、操作)训练多个专家策略。然后,利用这些专家策略生成的数据,训练一个统一的策略(HOVER)。HOVER策略能够根据任务需求,在不同的控制模式之间无缝切换。该框架包含专家策略训练模块和策略蒸馏模块。
关键创新:HOVER最重要的创新点在于提出了全身运动学运动模仿作为通用抽象的概念。通过模仿人类的全身运动,机器人可以学习到通用的运动技能,从而适应不同的控制模式。这种方法避免了为每种任务单独设计策略的需要,提高了策略的泛化性和效率。此外,多模式策略蒸馏框架也使得HOVER能够将不同的控制模式整合到一个统一的策略中。
关键设计:HOVER的关键设计包括:1) 使用运动学运动模仿作为奖励函数,鼓励机器人模仿人类的全身运动;2) 设计多模式策略蒸馏框架,将不同的控制模式整合到一个统一的策略中;3) 采用合适的网络结构,使得HOVER策略能够根据任务需求,在不同的控制模式之间无缝切换。具体的参数设置和损失函数细节未知。
🖼️ 关键图片

📊 实验亮点
论文提出的HOVER框架能够将多种控制模式整合到一个统一的策略中,实现不同模式间的无缝切换。具体实验数据未知,但论文强调HOVER无需为每种控制模式重新训练策略,提高了效率和灵活性。HOVER在人形机器人控制的通用性和可扩展性方面具有显著优势。
🎯 应用场景
HOVER具有广泛的应用前景,例如:在家庭服务机器人中,HOVER可以使机器人能够完成导航、物体抓取、桌面操作等多种任务;在工业机器人中,HOVER可以使机器人能够适应不同的生产线和工作环境;在救援机器人中,HOVER可以使机器人能够在复杂地形中移动,并进行搜救工作。HOVER的通用性和灵活性将极大地推动人形机器人在各个领域的应用。
📄 摘要(原文)
Humanoid whole-body control requires adapting to diverse tasks such as navigation, loco-manipulation, and tabletop manipulation, each demanding a different mode of control. For example, navigation relies on root velocity tracking, while tabletop manipulation prioritizes upper-body joint angle tracking. Existing approaches typically train individual policies tailored to a specific command space, limiting their transferability across modes. We present the key insight that full-body kinematic motion imitation can serve as a common abstraction for all these tasks and provide general-purpose motor skills for learning multiple modes of whole-body control. Building on this, we propose HOVER (Humanoid Versatile Controller), a multi-mode policy distillation framework that consolidates diverse control modes into a unified policy. HOVER enables seamless transitions between control modes while preserving the distinct advantages of each, offering a robust and scalable solution for humanoid control across a wide range of modes. By eliminating the need for policy retraining for each control mode, our approach improves efficiency and flexibility for future humanoid applications.