Exploring the Reliability of Foundation Model-Based Frontier Selection in Zero-Shot Object Goal Navigation
作者: Shuaihang Yuan, Halil Utku Unlu, Hao Huang, Congcong Wen, Anthony Tzes, Yi Fang
分类: cs.RO
发布日期: 2024-10-28
备注: 17 pages, 5 figures, 3 tables
💡 一句话要点
提出基于多专家共识的零样本目标导航方法,提升机器人环境推理能力
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 零样本目标导航 机器人导航 基础模型 多专家系统 共识决策 环境推理 RoboTHOR HM3D
📋 核心要点
- 现有基于基础模型的零样本目标导航方法,在环境理解和推理方面存在不相关或无意义的输出,影响导航可靠性。
- 提出多专家决策框架,通过多样化专家前沿分析(DEFA)和共识决策(CDM)提高决策的可靠性。
- 在RoboTHOR和HM3D数据集上,该方法在导航到未训练目标方面表现出色,优于现有基线方法,展示了良好的泛化能力。
📝 摘要(中文)
本文提出了一种新颖的方法,用于零样本目标导航(ZS-OGN)中可靠的前沿选择。该方法利用基础模型增强机器人导航系统,从而提高室内环境中的常识推理能力。我们的方法引入了一个多专家决策框架,以解决基于基础模型的系统中常见的无意义或不相关的推理问题。该方法包含两个关键组成部分:多样化专家前沿分析(DEFA)和共识决策(CDM)。DEFA利用家具布置、房间类型分析和视觉场景推理这三个专家模型,而CDM聚合它们的输出,优先考虑一致或多数共识以获得更可靠的决策。在RoboTHOR和HM3D数据集上展示了最先进的性能,我们的方法擅长导航到未训练的对象或目标,并优于各种基线,展示了其对动态现实世界条件的适应性和卓越的泛化能力。
🔬 方法详解
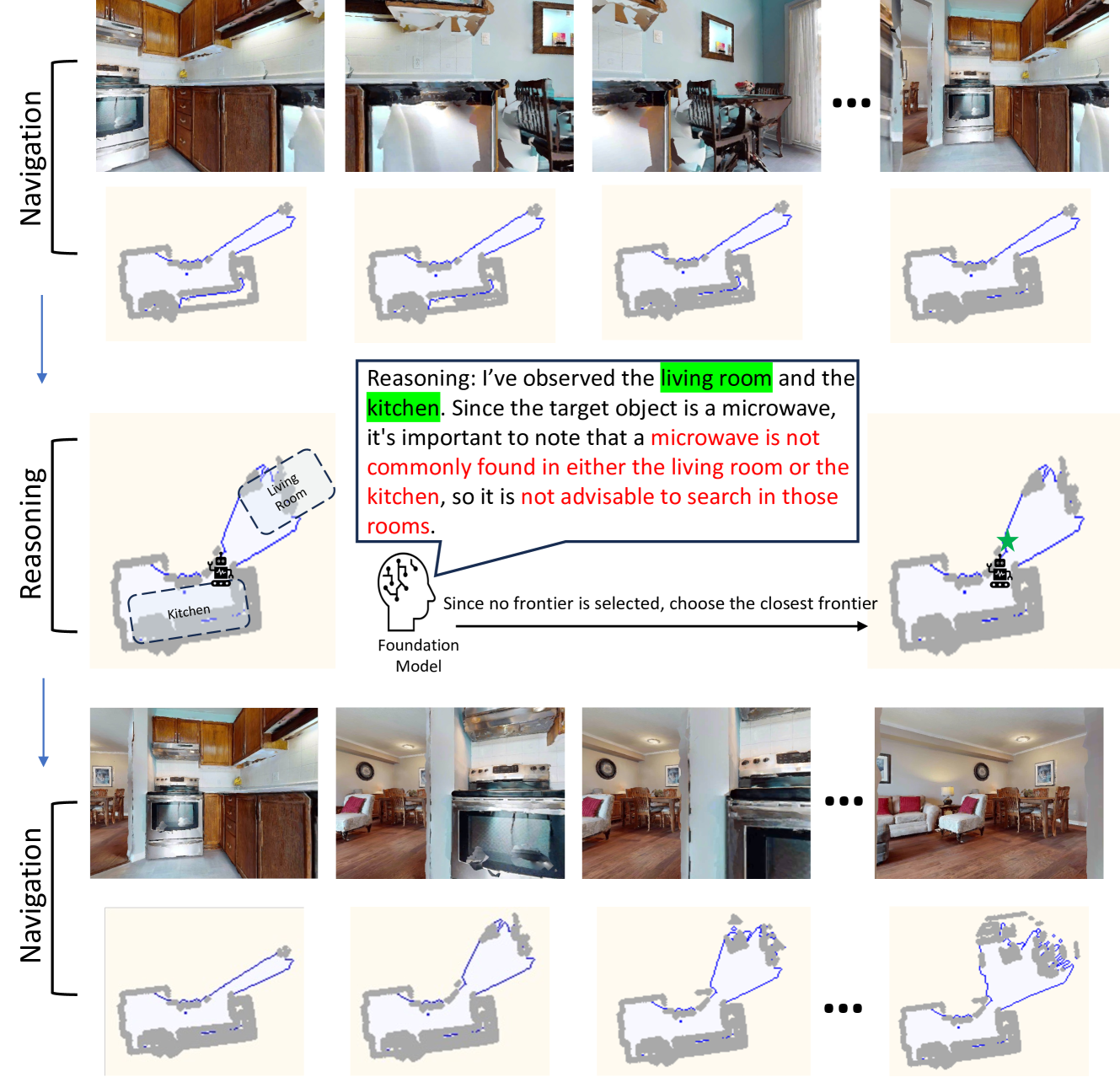
问题定义:零样本目标导航(ZS-OGN)旨在让机器人导航到环境中未见过的目标物体。现有方法,特别是基于大型语言模型等基础模型的方法,在复杂室内环境中进行推理时,容易产生不准确或不相关的建议,导致导航失败。这些方法缺乏对环境的细粒度理解和可靠的决策机制。
核心思路:本文的核心思路是引入一个多专家系统,每个专家从不同的角度(例如家具布置、房间类型、视觉场景)分析环境,然后通过共识机制整合这些专家的意见。这种方法旨在减少单个模型可能产生的偏差,并提高决策的鲁棒性和准确性。通过模拟人类在复杂决策场景中寻求多方意见的做法,提升机器人导航的可靠性。
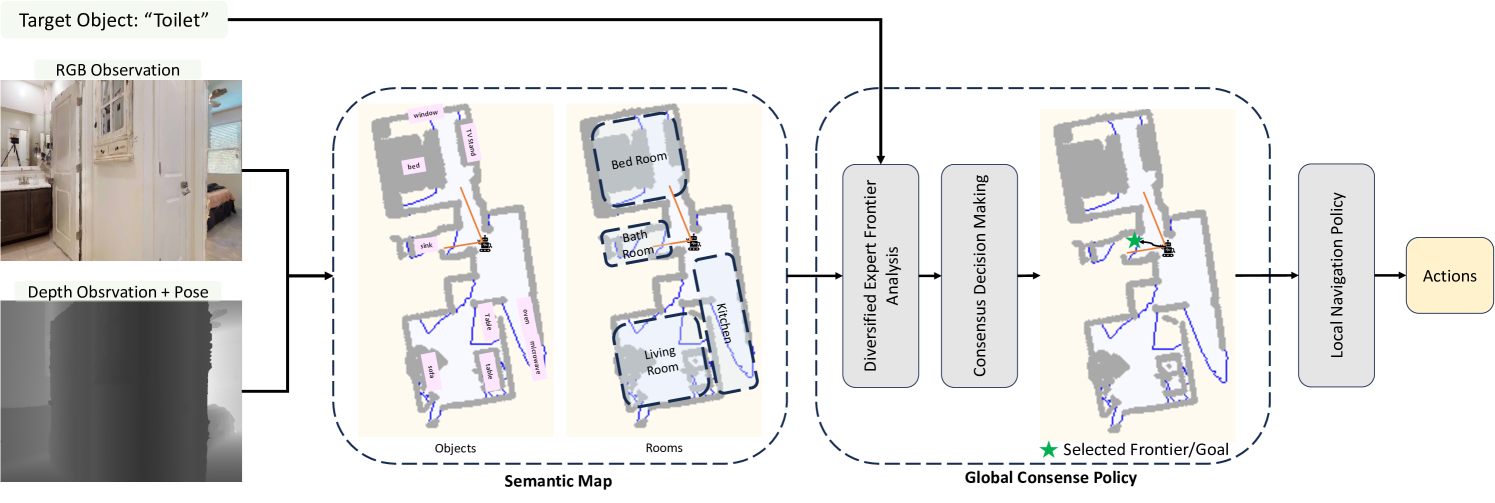
技术框架:该方法主要包含两个阶段:多样化专家前沿分析(DEFA)和共识决策(CDM)。DEFA阶段,三个专家模型(家具布置分析、房间类型分析、视觉场景推理)并行工作,分析当前环境并提出导航建议。CDM阶段,收集所有专家的建议,并根据预定义的共识规则(例如,多数投票)选择最终的导航目标。整个框架旨在利用不同专家的优势,减少错误决策的概率。
关键创新:该方法最重要的创新点在于其多专家共识决策框架。与传统的单模型方法相比,该框架能够更全面地理解环境,并做出更可靠的导航决策。通过引入多样化的专家,该方法能够有效地减少基础模型可能产生的幻觉或错误推理。此外,共识机制的设计也保证了最终决策的稳健性。
关键设计:DEFA阶段的三个专家模型可以采用不同的网络结构和训练方法,具体取决于任务的性质。例如,视觉场景推理专家可以使用预训练的视觉Transformer模型。CDM阶段的关键设计在于共识规则的选择。论文可能采用了简单的多数投票规则,也可能使用了更复杂的加权投票机制,其中不同专家的权重可以根据其历史表现进行调整。具体的损失函数和参数设置未知。
🖼️ 关键图片
📊 实验亮点
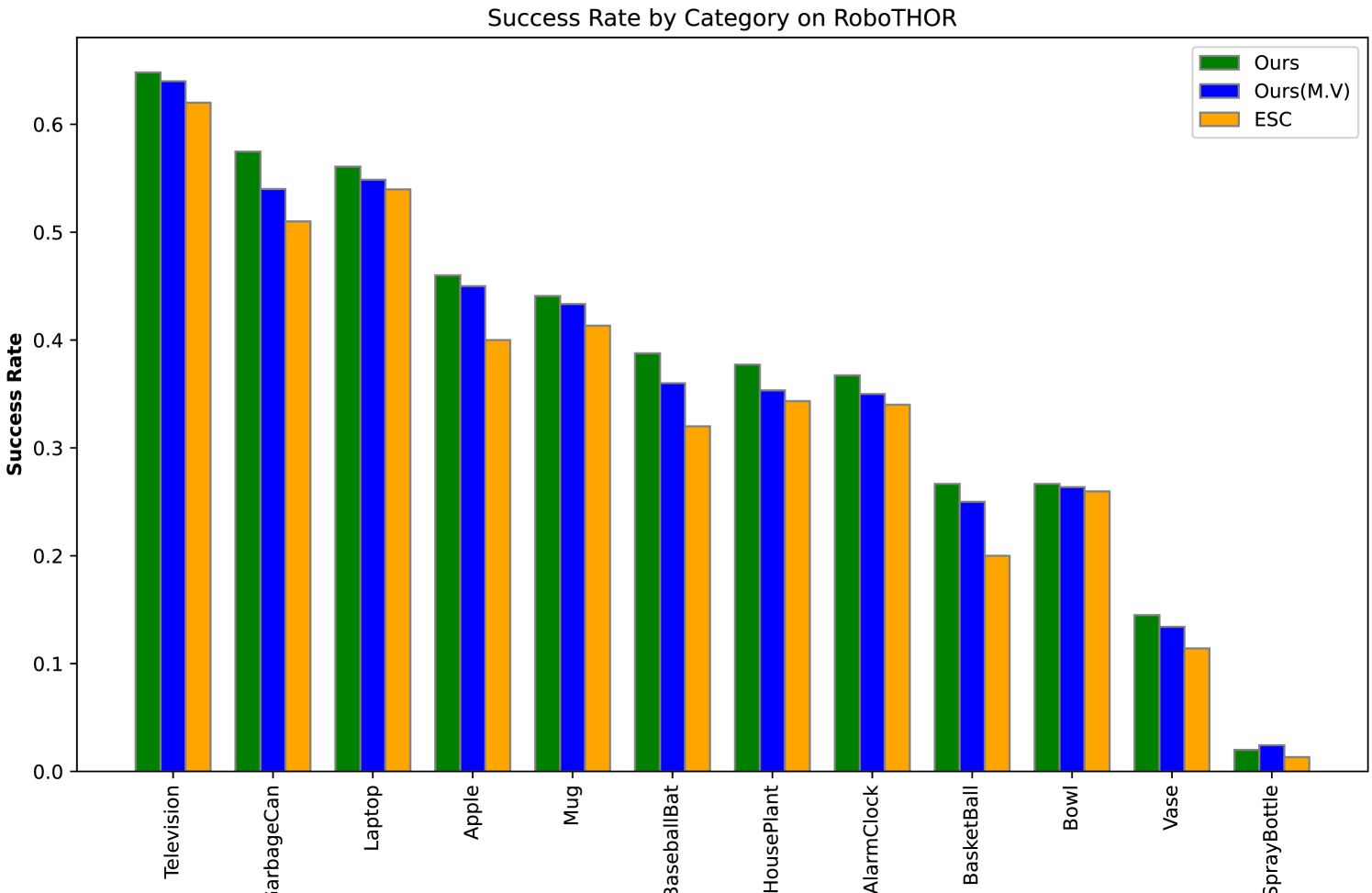
该方法在RoboTHOR和HM3D数据集上取得了最先进的性能,显著优于现有的基线方法。具体性能数据未知,但摘要强调了其在导航到未训练对象或目标方面的卓越表现,以及对动态现实世界条件的适应性和卓越的泛化能力。实验结果表明,多专家共识决策框架能够有效地提高零样本目标导航的可靠性和准确性。
🎯 应用场景
该研究成果可应用于各种机器人导航场景,例如家庭服务机器人、仓储物流机器人、以及搜索救援机器人。通过提高机器人在未知环境中的导航能力,可以显著提升其工作效率和安全性。未来,该方法可以扩展到更复杂的环境和任务,例如户外导航和多机器人协作。
📄 摘要(原文)
In this paper, we present a novel method for reliable frontier selection in Zero-Shot Object Goal Navigation (ZS-OGN), enhancing robotic navigation systems with foundation models to improve commonsense reasoning in indoor environments. Our approach introduces a multi-expert decision framework to address the nonsensical or irrelevant reasoning often seen in foundation model-based systems. The method comprises two key components: Diversified Expert Frontier Analysis (DEFA) and Consensus Decision Making (CDM). DEFA utilizes three expert models: furniture arrangement, room type analysis, and visual scene reasoning, while CDM aggregates their outputs, prioritizing unanimous or majority consensus for more reliable decisions. Demonstrating state-of-the-art performance on the RoboTHOR and HM3D datasets, our method excels at navigating towards untrained objects or goals and outperforms various baselines, showcasing its adaptability to dynamic real-world conditions and superior generalization capabilities.