Neural Fields in Robotics: A Survey
作者: Muhammad Zubair Irshad, Mauro Comi, Yen-Chen Lin, Nick Heppert, Abhinav Valada, Rares Ambrus, Zsolt Kira, Jonathan Tremblay
分类: cs.RO, cs.AI, cs.CV, cs.LG
发布日期: 2024-10-26
备注: 20 pages, 20 figures. Project Page: https://robonerf.github.io
💡 一句话要点
综述:神经场在机器人领域的应用,提升感知、规划与控制能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 神经场 机器人 三维重建 可微渲染 场景表示
📋 核心要点
- 现有机器人感知方法在处理复杂环境和多模态数据融合方面存在挑战,限制了机器人的适应性和决策能力。
- 神经场通过连续隐式和显式神经表示,结合可微渲染技术,提供了一种高保真、紧凑且可微的3D场景表示方法。
- 该综述全面回顾了神经场在机器人感知、规划和控制中的应用,并分析了其优势、局限性以及未来发展方向。
📝 摘要(中文)
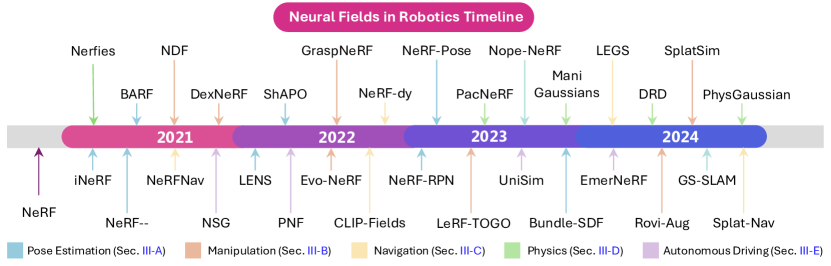
神经场已成为计算机视觉和机器人领域中3D场景表示的一种变革性方法,能够从带位姿的2D数据中准确推断几何形状、3D语义和动态信息。利用可微渲染,神经场包含连续隐式和显式神经表示,从而实现高保真3D重建、多模态传感器数据集成和新视点生成。本综述探讨了神经场在机器人领域的应用,强调了它们在增强感知、规划和控制方面的潜力。其紧凑性、内存效率和可微性,以及与基础模型和生成模型的无缝集成,使其成为实时应用的理想选择,从而提高机器人的适应性和决策能力。本文对机器人领域的神经场进行了全面回顾,基于200多篇论文,对各个领域的应用进行了分类,并评估了它们的优势和局限性。首先,我们介绍了四个关键的神经场框架:Occupancy Networks、Signed Distance Fields、Neural Radiance Fields和Gaussian Splatting。其次,我们详细介绍了神经场在五个主要机器人领域的应用:位姿估计、操作、导航、物理和自动驾驶,重点介绍了关键工作,并讨论了经验教训和未解决的挑战。最后,我们概述了神经场在机器人领域的当前局限性,并为未来的研究提出了有希望的方向。
🔬 方法详解
问题定义:机器人需要理解和交互的3D环境通常是复杂且动态的。传统方法在处理遮挡、噪声和传感器数据差异方面存在困难,导致感知不准确,进而影响规划和控制。神经场旨在提供一种更鲁棒、更高效的3D场景表示方法,以克服这些挑战。
核心思路:神经场的核心思想是使用神经网络来表示3D场景的属性(例如,颜色、密度、距离)。通过将3D空间中的点作为神经网络的输入,网络输出该点的属性值。这种连续的表示方式允许进行可微渲染,从而可以优化神经场的参数,使其与观测到的2D图像一致。
技术框架:该综述将神经场框架分为四类:Occupancy Networks (OccNet)、Signed Distance Fields (SDF)、Neural Radiance Fields (NeRF) 和 Gaussian Splatting。OccNet预测空间中点的占用概率;SDF预测点到表面的有符号距离;NeRF预测点的颜色和密度,用于体积渲染;Gaussian Splatting 使用3D高斯分布来表示场景。这些框架通常包含一个神经网络,用于将3D坐标映射到相应的属性值,并使用可微渲染技术将这些属性值渲染成2D图像。
关键创新:神经场的关键创新在于其连续的、基于神经网络的场景表示方法,以及可微渲染技术的应用。与传统的离散表示方法(例如,体素网格)相比,神经场具有更高的内存效率和更好的插值能力。可微渲染允许直接从2D图像优化3D场景表示,从而避免了传统方法中复杂的几何重建步骤。
关键设计:不同的神经场框架在网络结构、损失函数和渲染方式上有所不同。例如,NeRF使用多层感知机(MLP)来表示场景,并使用体积渲染技术来生成图像。损失函数通常包括图像重建损失和正则化项。Gaussian Splatting 则侧重于使用显式的高斯分布进行场景表示和快速渲染,通过可微的splatting操作进行优化。
🖼️ 关键图片

📊 实验亮点
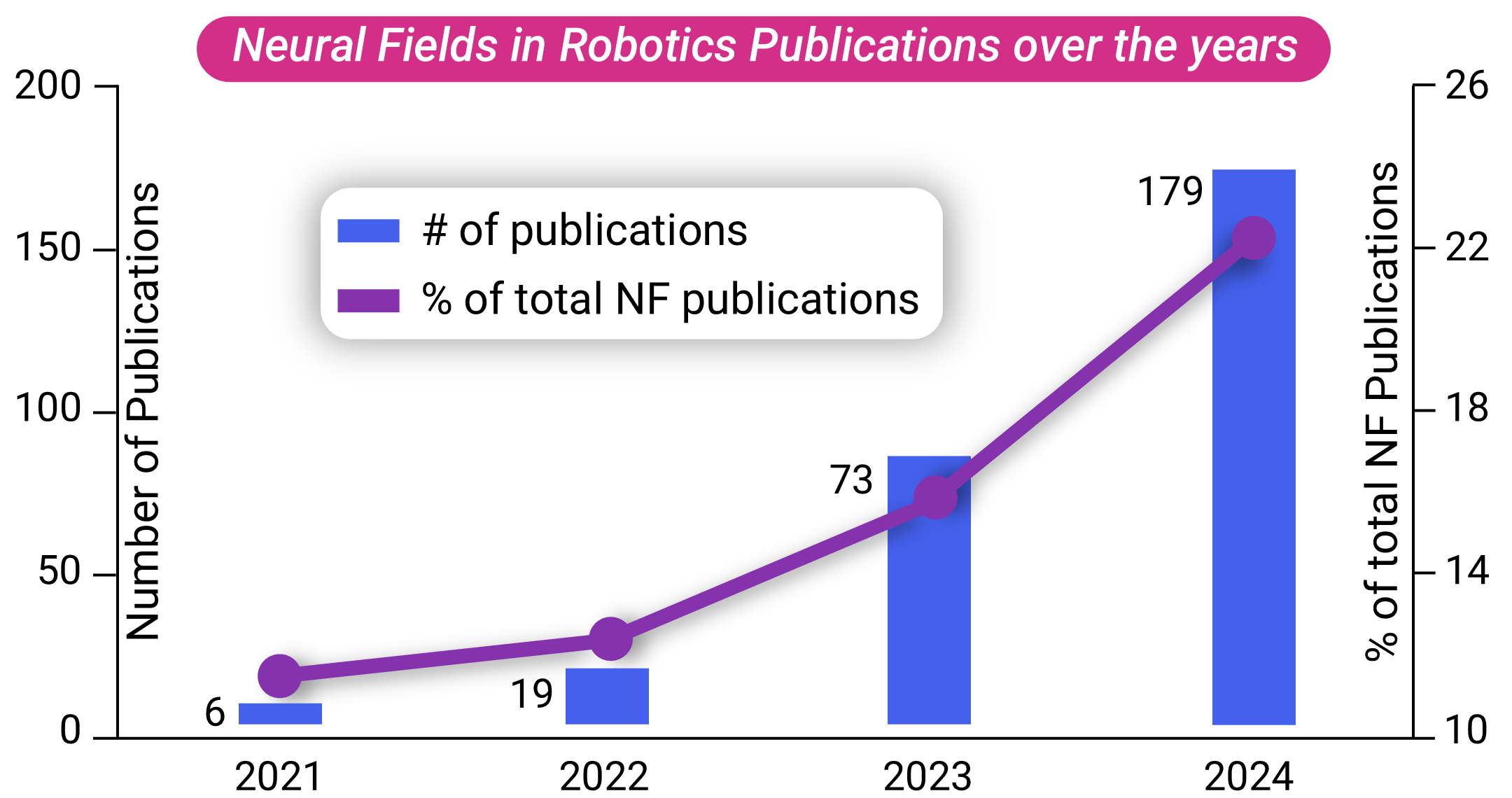
该综述总结了超过200篇关于神经场在机器人领域应用的论文,并对各种神经场框架和应用场景进行了分类和评估。它强调了神经场在提高机器人感知、规划和控制能力方面的潜力,并指出了当前研究的局限性和未来发展方向。该综述为研究人员提供了一个全面的神经场机器人应用指南。
🎯 应用场景
神经场在机器人领域具有广泛的应用前景,包括机器人导航、操作、位姿估计、物理模拟和自动驾驶。它们可以用于构建高精度的3D地图,实现更鲁棒的物体识别和跟踪,以及生成逼真的模拟环境,从而提高机器人的自主性和适应性。此外,神经场与生成模型的结合,有望实现更智能的机器人行为。
📄 摘要(原文)
Neural Fields have emerged as a transformative approach for 3D scene representation in computer vision and robotics, enabling accurate inference of geometry, 3D semantics, and dynamics from posed 2D data. Leveraging differentiable rendering, Neural Fields encompass both continuous implicit and explicit neural representations enabling high-fidelity 3D reconstruction, integration of multi-modal sensor data, and generation of novel viewpoints. This survey explores their applications in robotics, emphasizing their potential to enhance perception, planning, and control. Their compactness, memory efficiency, and differentiability, along with seamless integration with foundation and generative models, make them ideal for real-time applications, improving robot adaptability and decision-making. This paper provides a thorough review of Neural Fields in robotics, categorizing applications across various domains and evaluating their strengths and limitations, based on over 200 papers. First, we present four key Neural Fields frameworks: Occupancy Networks, Signed Distance Fields, Neural Radiance Fields, and Gaussian Splatting. Second, we detail Neural Fields' applications in five major robotics domains: pose estimation, manipulation, navigation, physics, and autonomous driving, highlighting key works and discussing takeaways and open challenges. Finally, we outline the current limitations of Neural Fields in robotics and propose promising directions for future research. Project page: https://robonerf.github.io