IPPON: Common Sense Guided Informative Path Planning for Object Goal Navigation
作者: Kaixian Qu, Jie Tan, Tingnan Zhang, Fei Xia, Cesar Cadena, Marco Hutter
分类: cs.RO, cs.AI, cs.CL
发布日期: 2024-10-25
💡 一句话要点
IPPON:常识引导的物体目标导航信息路径规划
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 物体目标导航 常识推理 信息路径规划 语义SLAM 机器人探索
📋 核心要点
- 现有物体目标导航方法通常依赖于前沿探索,但缺乏对环境语义信息的有效利用,导致探索效率低下。
- IPPON方法利用大型语言模型的常识先验,通过语义信息引导探索过程,提高找到目标物体的效率。
- 实验结果表明,IPPON方法在Habitat ObjectNav Challenge 2023中取得了显著的性能提升,并在真实机器人上验证了其有效性。
📝 摘要(中文)
本文提出了一种新颖的信息路径规划和3D物体概率映射方法,用于在未探索环境中高效导航至目标物体。该方法采用模块化策略,结合了经典探索算法(特别是前沿探索)与学习的语义映射/探索模块。映射模块通过语义分割和贝叶斯滤波器计算目标物体的概率。此外,它存储常见物体的概率,利用来自大型语言模型的常识先验来语义引导探索。当当前视点捕获到足够多的、被高置信度识别为目标物体的体素时,规划器终止。该规划器采用零样本方法,但在Habitat ObjectNav Challenge 2023中,其成功率(以路径长度加权的成功率SPL和软SPL衡量)达到了最先进的性能,超过其他作品20%以上。此外,还在真实机器人上验证了其有效性。
🔬 方法详解
问题定义:论文旨在解决在未知环境中,机器人如何高效地导航到特定目标物体的问题。现有方法,如纯粹的前沿探索,往往效率低下,因为它们没有充分利用环境中的语义信息。这些方法通常无法根据常识推断目标物体可能出现的位置,导致盲目探索。
核心思路:IPPON的核心思路是利用常识知识来引导探索过程。具体来说,它使用大型语言模型(LLM)提供的先验知识,例如“杯子通常出现在桌子上”,来预测目标物体可能出现的位置。通过将这些先验知识融入到路径规划中,机器人可以更有针对性地探索环境,从而提高导航效率。
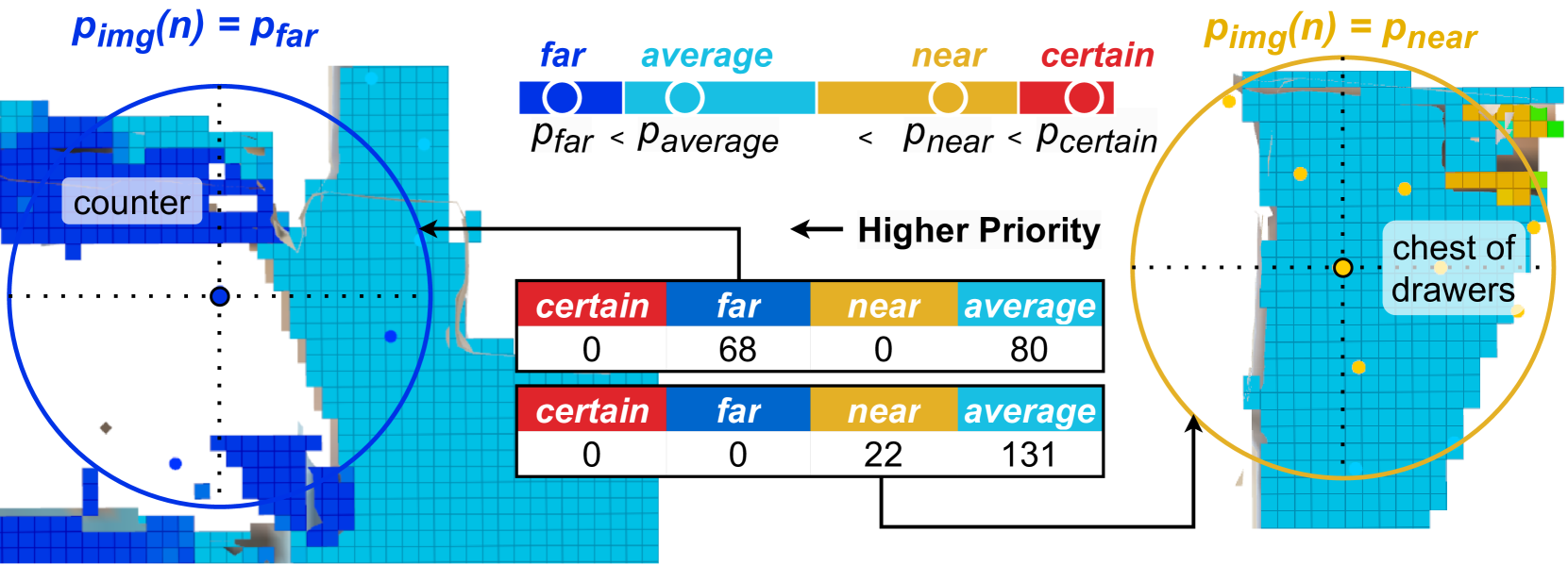
技术框架:IPPON的整体框架包括以下几个主要模块:1) 语义分割模块:用于识别环境中的物体,并估计目标物体的概率。2) 常识推理模块:利用大型语言模型获取目标物体和环境之间的常识关系。3) 3D物体概率映射模块:维护一个3D体素地图,用于存储每个体素包含目标物体的概率。4) 信息路径规划模块:根据物体概率地图和常识先验,规划一条信息量最大的路径,引导机器人探索。当机器人观察到足够多的、高置信度识别为目标物体的体素时,规划终止。
关键创新:IPPON最重要的创新点在于将大型语言模型的常识知识融入到物体目标导航中。与传统的基于几何或纯粹语义的探索方法不同,IPPON能够利用常识先验来指导探索,从而显著提高导航效率。这种方法使得机器人在未知环境中能够像人类一样,根据常识进行推理和探索。
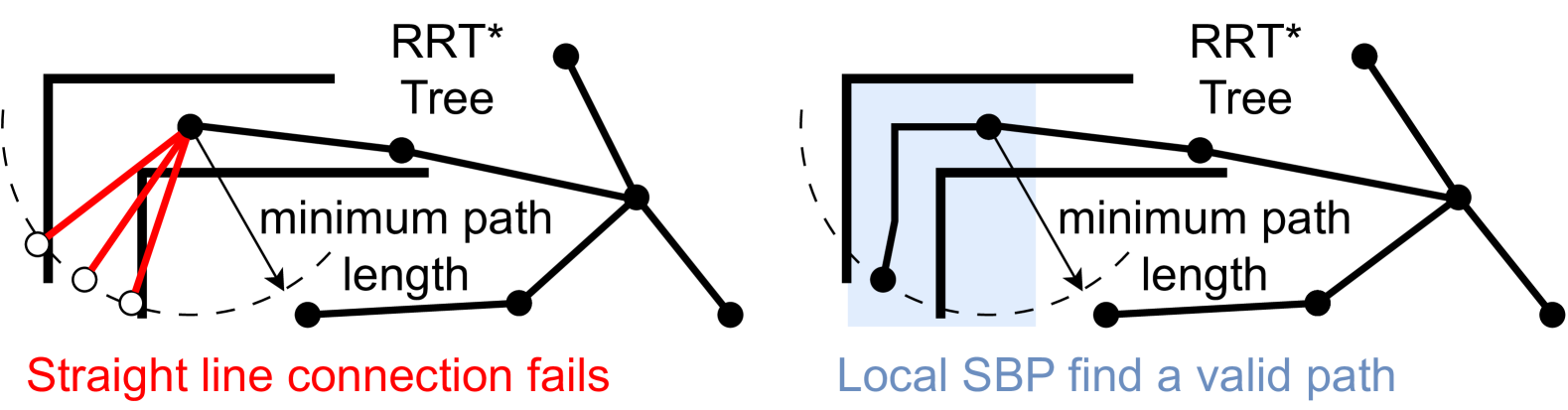
关键设计:IPPON的关键设计包括:1) 使用贝叶斯滤波器更新物体概率地图,融合来自不同视角的观测信息。2) 设计了一种基于信息增益的路径规划算法,选择能够最大程度提高目标物体概率的路径。3) 使用零样本学习方法,无需针对特定环境进行训练,即可直接应用到新的环境中。具体参数设置和网络结构等细节在论文中进行了详细描述(未知)。
🖼️ 关键图片

📊 实验亮点
IPPON在Habitat ObjectNav Challenge 2023中取得了显著的性能提升,其SPL和Soft SPL指标超过其他方法20%以上,达到了最先进的水平。这表明IPPON方法能够有效地利用常识知识来引导探索,提高导航效率。此外,IPPON还在真实机器人上进行了验证,证明了其在实际应用中的可行性。
🎯 应用场景
IPPON方法具有广泛的应用前景,可用于家庭服务机器人、仓库机器人、搜救机器人等领域。它可以帮助机器人在复杂、未知的环境中高效地找到目标物体,完成各种任务。例如,在家庭环境中,机器人可以根据用户的指令,找到指定的物品,并将其送到用户手中。在仓库环境中,机器人可以快速定位和拣选货物,提高物流效率。在搜救环境中,机器人可以帮助搜救人员快速找到被困人员。
📄 摘要(原文)
Navigating efficiently to an object in an unexplored environment is a critical skill for general-purpose intelligent robots. Recent approaches to this object goal navigation problem have embraced a modular strategy, integrating classical exploration algorithms-notably frontier exploration-with a learned semantic mapping/exploration module. This paper introduces a novel informative path planning and 3D object probability mapping approach. The mapping module computes the probability of the object of interest through semantic segmentation and a Bayes filter. Additionally, it stores probabilities for common objects, which semantically guides the exploration based on common sense priors from a large language model. The planner terminates when the current viewpoint captures enough voxels identified with high confidence as the object of interest. Although our planner follows a zero-shot approach, it achieves state-of-the-art performance as measured by the Success weighted by Path Length (SPL) and Soft SPL in the Habitat ObjectNav Challenge 2023, outperforming other works by more than 20%. Furthermore, we validate its effectiveness on real robots. Project webpage: https://ippon-paper.github.io/