Soft Finger Grasp Force and Contact State Estimation from Tactile Sensors
作者: Hun Jang, Joonbum Bae, Kevin Haninger
分类: cs.RO
发布日期: 2024-10-25
💡 一句话要点
提出基于触觉传感器的软手指抓取力与接触状态估计方法,无需物体特定训练。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 触觉传感器 力估计 接触状态估计 神经网络 抓取 机器人操作
📋 核心要点
- 软体手指在抓取中具有优势,但现有技术在力量和灵巧性方面存在不足,限制了其应用。
- 该论文提出利用集成触觉传感器估计手指力,进而推断接触状态,无需针对特定物体进行训练。
- 实验结果表明,该方法能够有效估计手指力,并成功应用于接触状态估计任务中。
📝 摘要(中文)
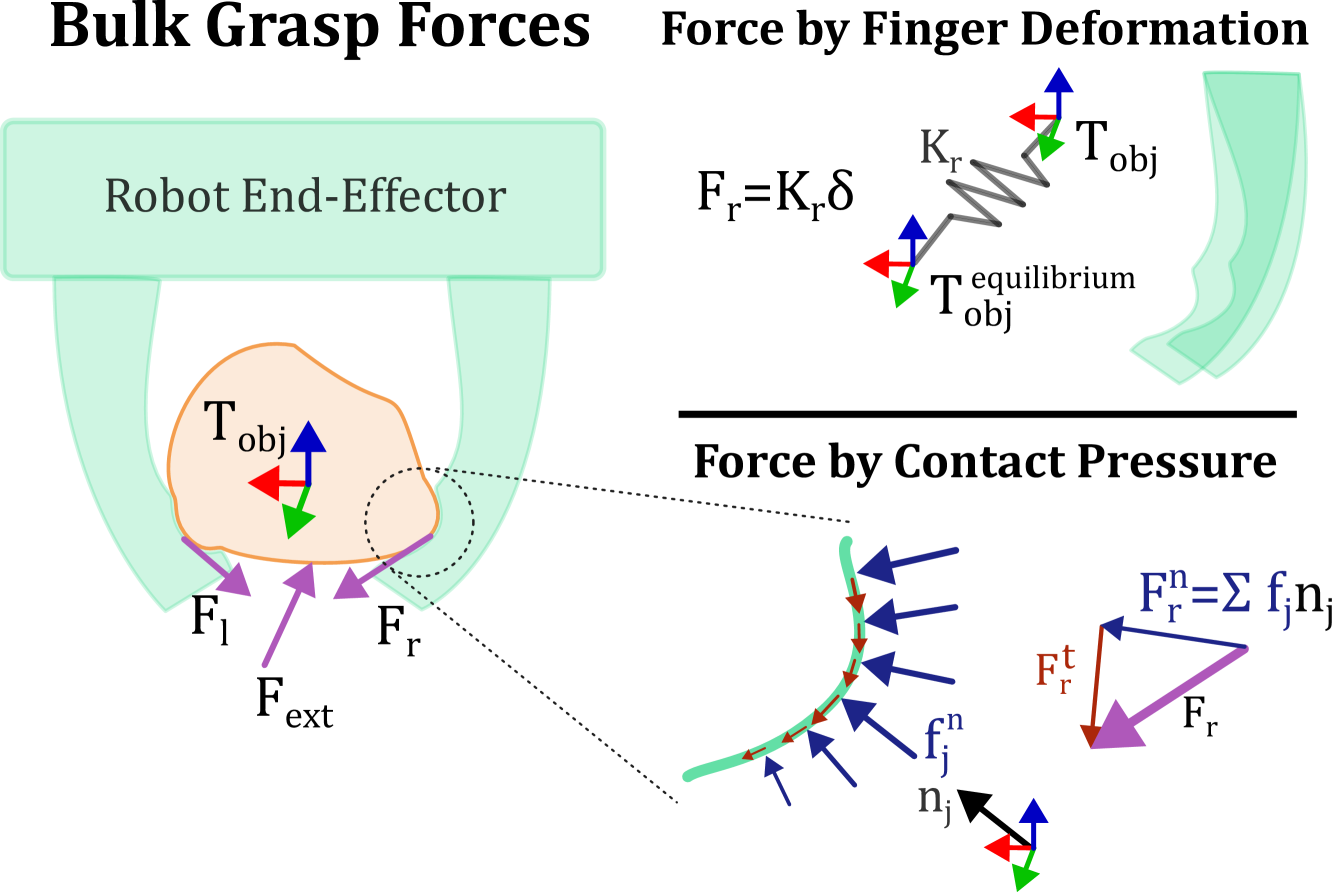
软体机器人手指能够提高抓取和操作的适应性,补偿物体或环境接触中的几何变化,但目前缺乏力量能力和精细的灵巧性。集成的触觉传感器可以提供抓取和任务信息,从而提高灵巧性,理想情况下不应需要针对特定物体的训练。手指施加的总力向量提供了关于内部抓取力(例如,用于抓取稳定性)的通用信息,并且当对所有手指求和时,可以估计作用在被抓取物体上的外力(例如,用于任务级控制)。在本研究中,我们研究了从集成的软传感器估计手指力的有效性,并用它来估计接触状态。我们使用神经网络进行力回归,使用力/扭矩传感器和一系列测试对象收集标记数据。随后,我们将此模型应用于插件任务场景,并证明其在估计接触状态方面的有效性。
🔬 方法详解
问题定义:论文旨在解决软体机器人手指在抓取过程中,如何准确估计手指受力以及与物体的接触状态的问题。现有方法通常需要针对特定物体进行训练,泛化能力较差,或者依赖于复杂的力学模型,难以实时应用。
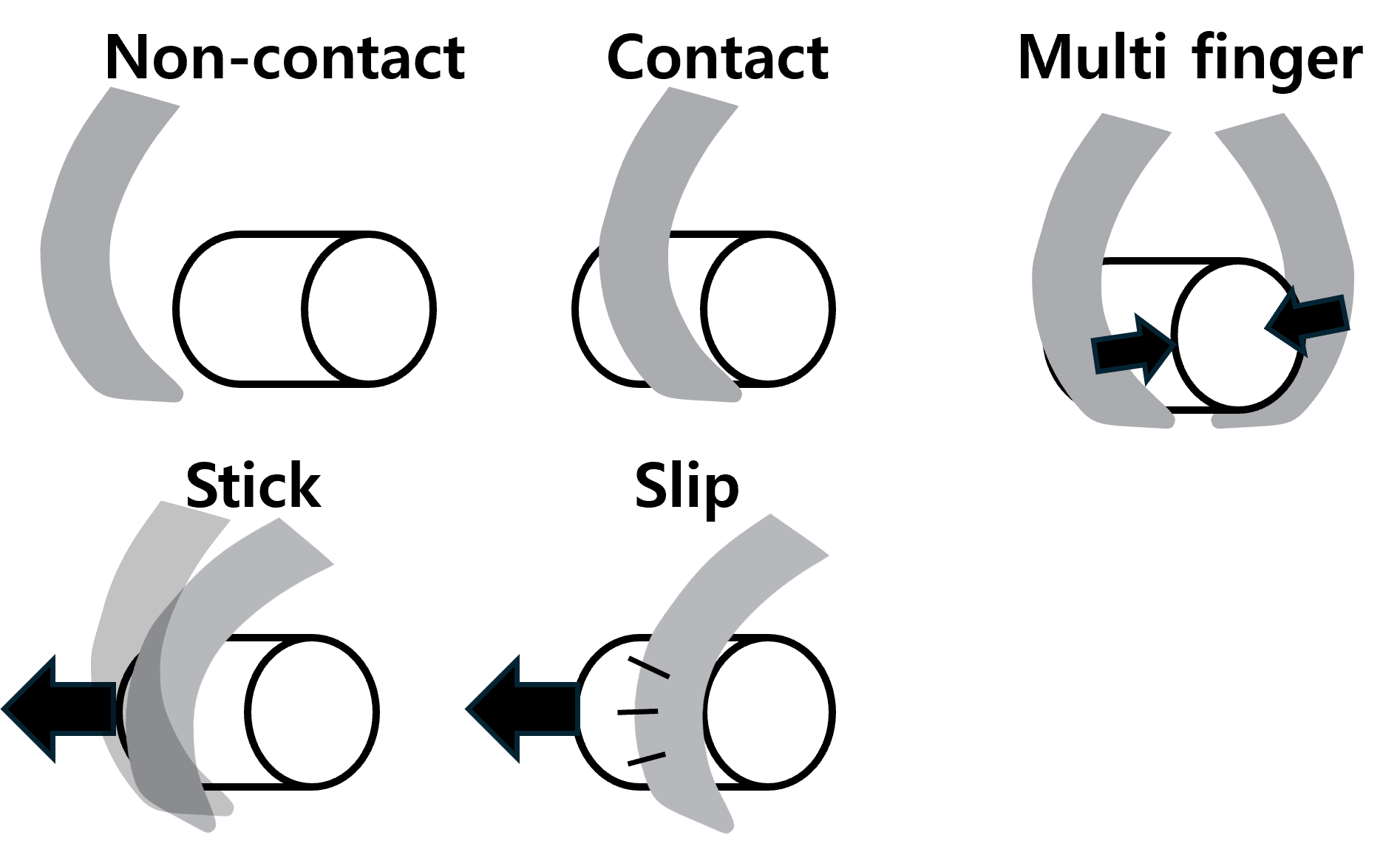
核心思路:论文的核心思路是利用集成的触觉传感器获取手指与物体接触的信息,通过神经网络学习触觉信息与手指受力之间的映射关系,从而实现手指力的估计。进一步,利用估计的手指力来推断接触状态。这种方法避免了对特定物体的依赖,提高了泛化能力。
技术框架:该方法主要包含以下几个阶段:1) 数据采集:使用力/扭矩传感器和一系列测试对象,收集触觉传感器数据和对应的手指受力数据,构建训练数据集。2) 模型训练:使用神经网络对采集的数据进行训练,学习触觉信息到手指力的回归模型。3) 接触状态估计:利用训练好的模型估计手指力,并根据手指力的分布和大小,推断手指与物体的接触状态。4) 任务验证:将训练好的模型应用于实际的抓取任务中,验证其在接触状态估计方面的有效性。
关键创新:该论文的关键创新在于提出了一种基于神经网络的、无需物体特定训练的手指力估计方法。该方法利用集成的触觉传感器,能够有效地学习触觉信息与手指力之间的关系,从而实现对不同物体的抓取和操作。此外,该方法还能够利用估计的手指力来推断接触状态,为机器人抓取和操作提供更丰富的信息。
关键设计:论文使用神经网络作为回归模型,具体的网络结构未知。损失函数可能采用均方误差等回归常用的损失函数。数据采集过程中,需要保证触觉传感器数据与力/扭矩传感器数据的同步性。在接触状态估计方面,可能需要设计一些规则或算法,根据手指力的分布和大小来判断接触状态。
🖼️ 关键图片

📊 实验亮点
该研究通过实验验证了所提出方法的有效性,在插件任务场景中,该方法能够准确估计手指力,并成功应用于接触状态估计。具体的性能数据未知,但实验结果表明,该方法具有良好的泛化能力,无需针对特定物体进行训练。
🎯 应用场景
该研究成果可应用于各种需要精细操作的机器人领域,如医疗机器人、工业机器人和家庭服务机器人。通过准确估计手指力和接触状态,机器人可以更好地控制抓取力度,提高操作的稳定性和安全性,从而完成更复杂的任务,例如精细装配、手术辅助和物体识别。
📄 摘要(原文)
Soft robotic fingers can improve adaptability in grasping and manipulation, compensating for geometric variation in object or environmental contact, but today lack force capacity and fine dexterity. Integrated tactile sensors can provide grasp and task information which can improve dexterity,but should ideally not require object-specific training. The total force vector exerted by a finger provides general information to the internal grasp forces (e.g. for grasp stability) and, when summed over fingers, an estimate of the external force acting on the grasped object (e.g. for task-level control). In this study, we investigate the efficacy of estimating finger force from integrated soft sensors and use it to estimate contact states. We use a neural network for force regression, collecting labelled data with a force/torque sensor and a range of test objects. Subsequently, we apply this model in a plug-in task scenario and demonstrate its validity in estimating contact states.