Perception, Control and Hardware for In-Hand Slip-Aware Object Manipulation with Parallel Grippers
作者: Gabriel Arslan Waltersson, Yiannis Karayiannidis
分类: cs.RO, eess.SY
发布日期: 2024-10-25 (更新: 2025-11-21)
💡 一句话要点
提出一种基于力觉和滑移感知的灵巧手内操作方法,用于平行爪夹持器
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 手内操作 滑移感知 力觉控制 机器人夹持器 传感器融合
📋 核心要点
- 现有的手内灵巧操作方法在处理滑移问题时存在不足,难以实现稳定操作。
- 该论文提出了一种基于传感器融合的滑移感知控制架构,利用力觉和滑移速度信息进行精确控制。
- 实验结果表明,该系统能够有效地操作各种物体,并具有良好的滑移避免能力。
📝 摘要(中文)
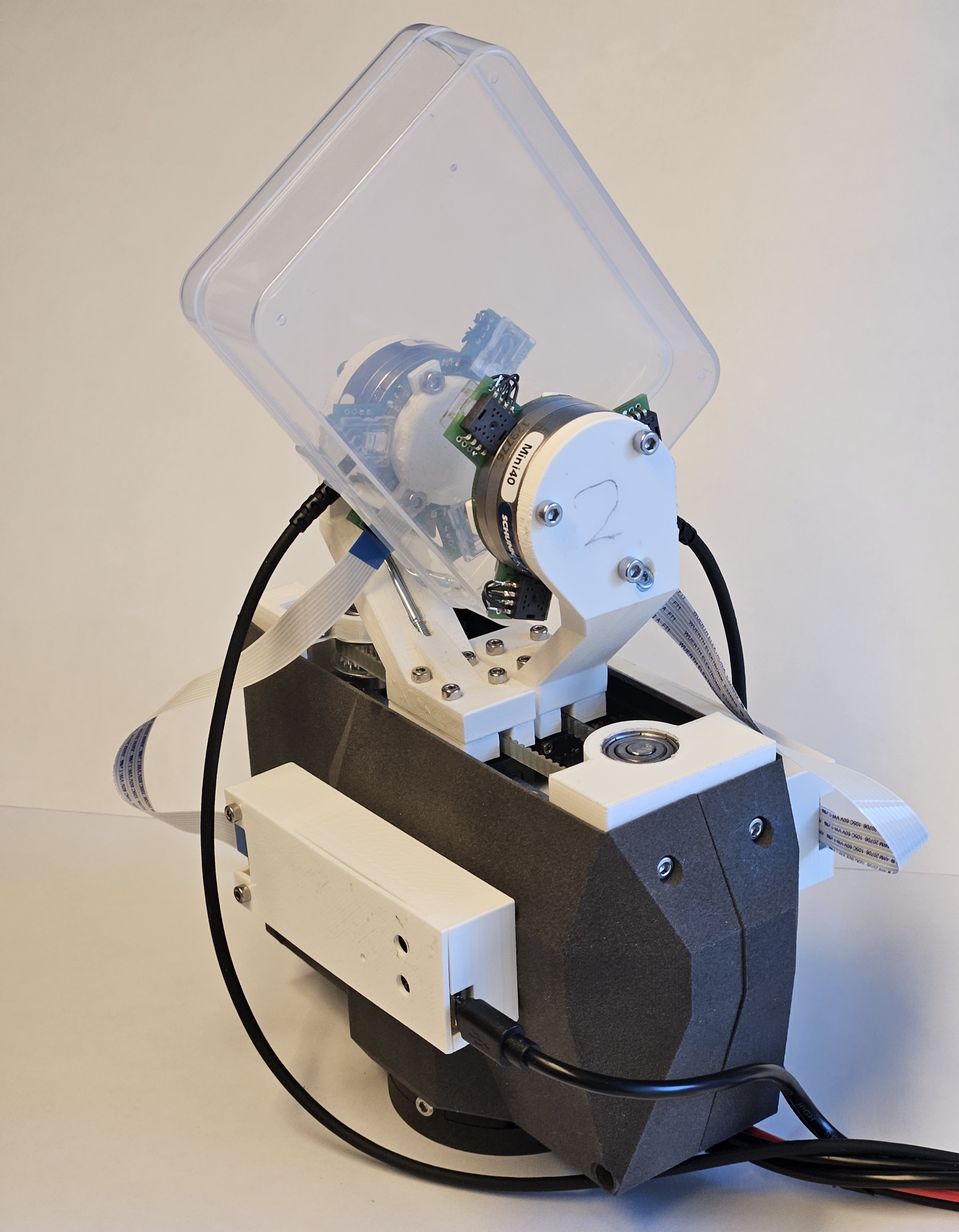
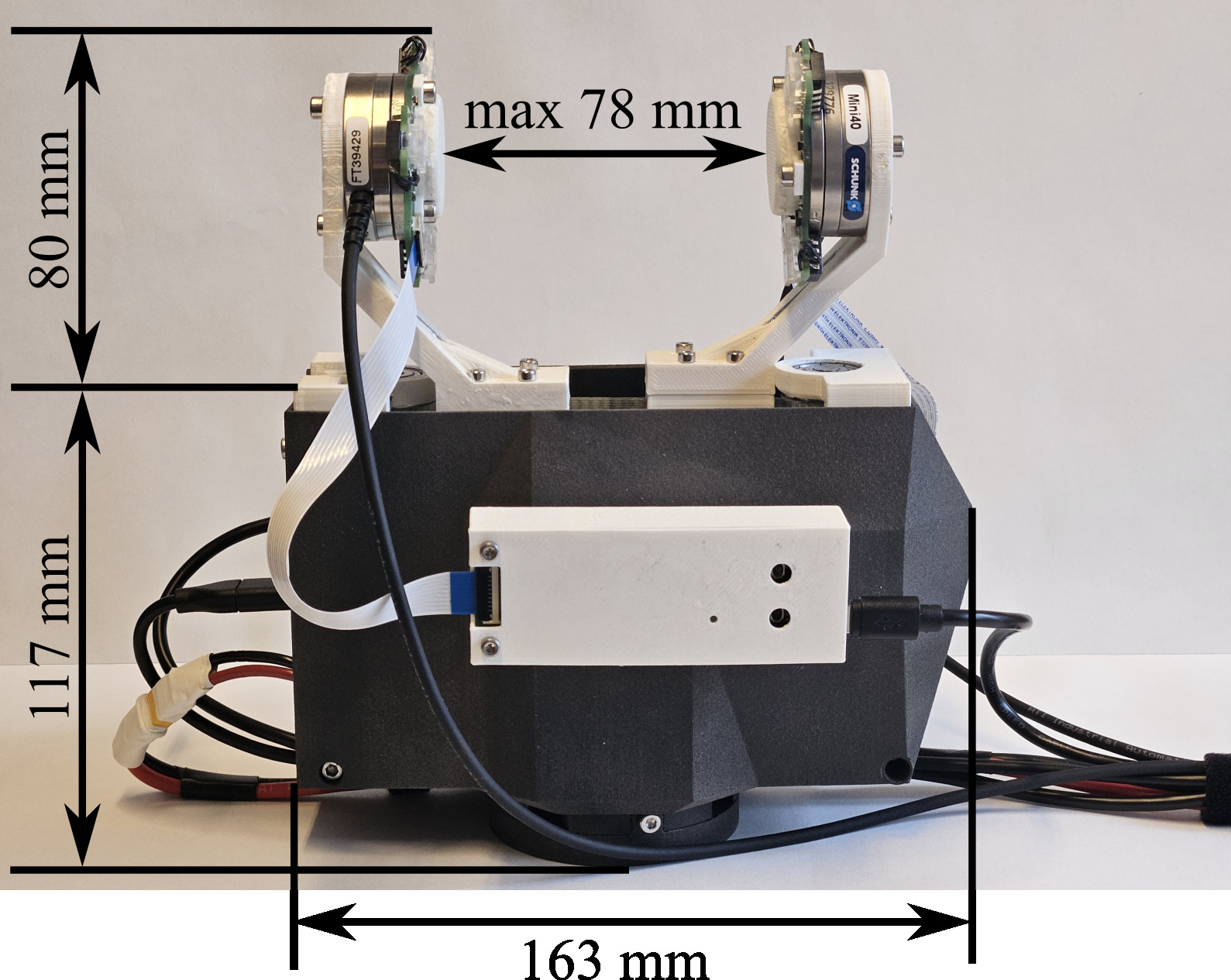
本文提出了一种用于手内滑移感知控制的感知-运动架构,该架构体现在一个传感器化的夹持器中。该架构中的夹持器具有快速闭环、低级力控制,并配备了能够独立测量接触力和滑动速度的传感器。我们的系统仅使用手内传感即可在拾取过程中快速估计必要的物体属性,而无需依赖先前的物体信息。我们引入了四种不同的滑移控制器:用于旋转和线性滑移的重力辅助轨迹跟踪、在夹持器旋转时保持物体方向的铰链控制器以及滑移避免控制器。该夹持器安装在机器人手臂上,并通过涉及各种物体的广泛实验进行了验证,展示了该架构在操作具有平坦表面的物体方面的新颖能力。
🔬 方法详解
问题定义:论文旨在解决机器人手爪在进行手内操作时,由于物体滑移而导致的控制精度下降和操作失败问题。现有方法通常依赖于预先已知的物体模型或复杂的视觉感知,难以适应未知环境和物体的操作。
核心思路:论文的核心思路是利用传感器融合,通过力觉传感器和滑移速度传感器实时感知物体与手爪之间的接触状态和滑移情况,并设计相应的控制策略来避免或补偿滑移,从而实现稳定的手内操作。
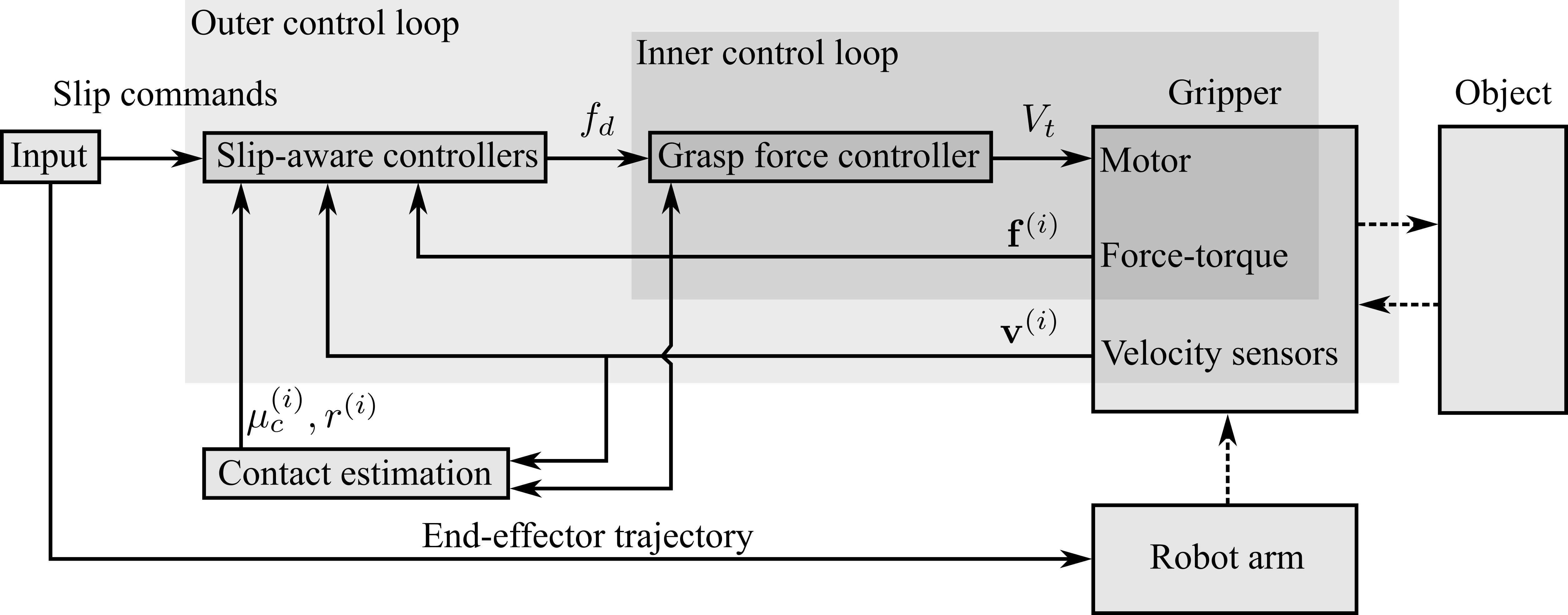
技术框架:该系统主要包含三个模块:传感器模块(力觉传感器和滑移速度传感器)、控制模块(包含四种滑移控制器)和执行模块(机器人手臂和夹持器)。传感器模块负责采集接触力和滑移速度数据,控制模块根据传感器数据计算控制指令,执行模块执行控制指令,调整夹持力和姿态,实现稳定的手内操作。
关键创新:该论文的关键创新在于提出了一种基于力觉和滑移速度融合的滑移感知控制架构,能够实时感知和响应物体的滑移情况,并设计了四种不同的滑移控制器,分别用于处理不同类型的滑移问题。此外,该系统无需预先知道物体的模型信息,具有较强的鲁棒性和适应性。
关键设计:四种滑移控制器包括:1) 重力辅助轨迹跟踪控制器,用于补偿重力引起的滑移;2) 旋转滑移轨迹跟踪控制器,用于控制旋转滑移;3) 铰链控制器,用于保持物体方向;4) 滑移避免控制器,用于主动避免滑移的发生。这些控制器基于PID控制或力/位混合控制,具体参数根据实验进行调整。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该系统能够成功操作各种具有平坦表面的物体,例如盒子、书本等。通过对比实验,验证了所提出的滑移控制器的有效性,能够显著降低滑移发生的概率,提高操作的成功率。此外,该系统能够在拾取过程中快速估计物体属性,无需预先知道物体信息。
🎯 应用场景
该研究成果可应用于各种需要灵巧手内操作的机器人应用场景,例如:工业自动化中的零件装配、医疗机器人中的手术操作、服务机器人中的物体抓取和整理等。该技术能够提高机器人的操作精度和稳定性,使其能够更好地适应复杂和动态的环境,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
Dexterous in-hand manipulation offers significant potential to enhance robotic manipulator capabilities. This paper presents a sensori-motor architecture for in-hand slip-aware control, being embodied in a sensorized gripper. The gripper in our architecture features rapid closed-loop, low-level force control, and is equipped with sensors capable of independently measuring contact forces and sliding velocities. Our system can quickly estimate essential object properties during pick-up using only in-hand sensing, without relying on prior object information. We introduce four distinct slippage controllers: gravity-assisted trajectory following for both rotational and linear slippage, a hinge controller that maintains the object's orientation while the gripper rotates, and a slip-avoidance controller. The gripper is mounted on a robot arm and validated through extensive experiments involving a diverse range of objects, demonstrating the architecture's novel capabilities for manipulating objects with flat surfaces.