Self-Improving Autonomous Underwater Manipulation
作者: Ruoshi Liu, Huy Ha, Mengxue Hou, Shuran Song, Carl Vondrick
分类: cs.RO
发布日期: 2024-10-24
备注: Project Page: https://aquabot.cs.columbia.edu/
💡 一句话要点
AquaBot:提出一种自提升的水下自主操作机器人系统,超越人类遥操作性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 水下机器人 自主操作 行为克隆 强化学习 自学习优化
📋 核心要点
- 水下机器人操作面临复杂流体动力学和非结构化环境的挑战,现有系统过度依赖人类遥操作,效率和安全性受限。
- AquaBot采用行为克隆从人类演示中学习,并结合自学习优化策略,实现超越人类操作的自主性能提升。
- 真实世界实验表明,AquaBot在物体抓取、垃圾分类和救援等任务中表现出色,速度比人类操作员提高41%。
📝 摘要(中文)
本文介绍了一种名为AquaBot的完全自主水下操作系统。水下机器人操作由于复杂流体动力学和非结构化环境而面临巨大挑战,导致大多数操作系统严重依赖人类遥操作。AquaBot结合了来自人类演示的行为克隆和自学习优化,从而超越人类遥操作的性能。通过大量的真实世界实验,我们展示了AquaBot在各种操作任务中的多功能性,包括物体抓取、垃圾分类和救援取回。真实实验表明,AquaBot的自优化策略在速度上优于人类操作员41%。AquaBot代表了水下自主和自提升操作系统的有希望的一步。我们开源了硬件和软件的实现细节。
🔬 方法详解
问题定义:水下机器人操作任务由于水下环境的复杂性和不确定性,例如光照不足、水流扰动、目标物体位置不确定等,使得传统的遥操作方式效率低下且容易出错。现有方法难以实现完全自主的操作,严重依赖人类操作员的经验和技能。因此,如何设计一种能够自主学习并不断提升操作性能的水下机器人系统是本文要解决的核心问题。
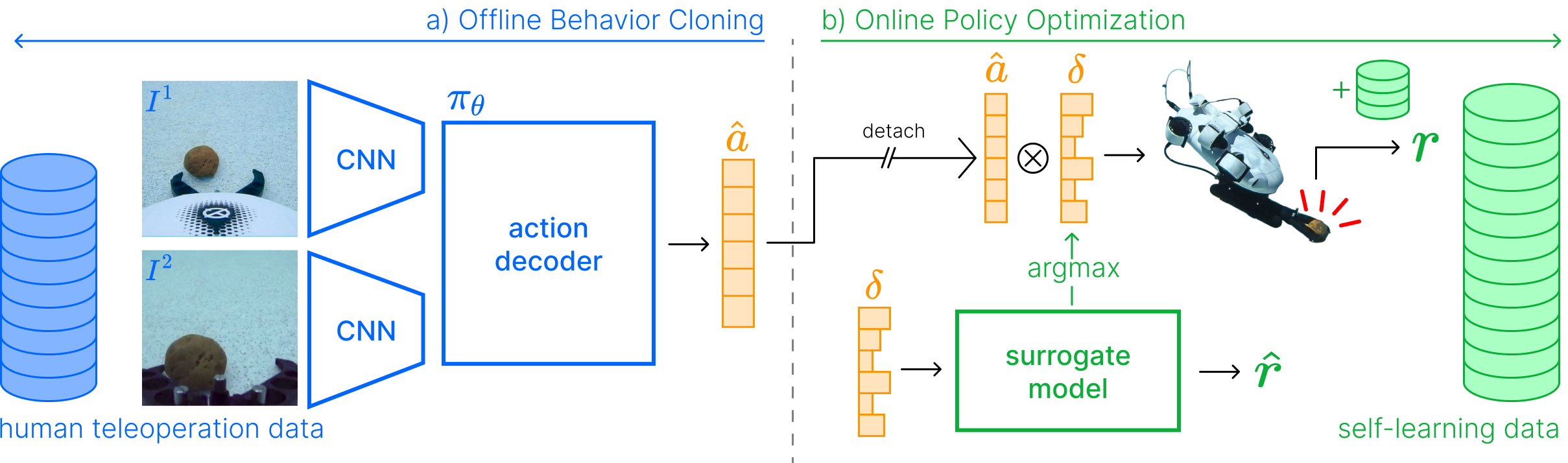
核心思路:本文的核心思路是结合行为克隆和自学习优化,利用人类演示数据初始化机器人策略,然后通过强化学习等方法在真实环境中进行自我优化,从而克服水下环境的挑战,实现超越人类操作员的性能。这种方法充分利用了人类的先验知识,并允许机器人通过与环境的交互不断改进其策略。
技术框架:AquaBot系统的整体框架包含以下几个主要模块:1) 数据采集模块:通过人类遥操作收集水下操作的演示数据。2) 行为克隆模块:利用收集到的数据训练初始机器人策略,模仿人类的操作行为。3) 自学习优化模块:通过强化学习等方法,在真实水下环境中对机器人策略进行优化,使其能够更好地适应环境并完成任务。4) 执行模块:将优化后的策略部署到机器人上,使其能够自主执行水下操作任务。
关键创新:本文最重要的技术创新点在于将行为克隆和自学习优化相结合,构建了一个能够自主提升性能的水下机器人系统。与传统的遥操作方法相比,AquaBot能够实现完全自主的操作,并且可以通过自学习不断提升性能。与传统的强化学习方法相比,AquaBot利用行为克隆初始化策略,加速了学习过程,并提高了学习效率。
关键设计:在行为克隆阶段,作者使用了监督学习方法,利用人类演示数据训练了一个神经网络模型,该模型将机器人的状态作为输入,输出机器人的动作。在自学习优化阶段,作者使用了强化学习算法,例如近端策略优化(PPO),通过与环境的交互不断调整神经网络模型的参数,使其能够更好地完成任务。此外,作者还设计了一系列的奖励函数,用于指导机器人的学习过程。
🖼️ 关键图片


📊 实验亮点
AquaBot在真实水下环境中进行了广泛的实验,包括物体抓取、垃圾分类和救援取回等任务。实验结果表明,AquaBot的自优化策略在速度上比人类操作员提高了41%。这一显著的性能提升证明了AquaBot的有效性和优越性,并表明其在水下自主操作领域具有巨大的潜力。
🎯 应用场景
AquaBot技术可广泛应用于水下环境的各种任务,如水下基础设施维护、海洋资源勘探、水下搜救、水下考古、海洋环境监测和水下垃圾清理等。该技术能够降低对人类操作员的依赖,提高水下作业的效率和安全性,并为探索和利用海洋资源提供新的可能性。未来,该技术有望进一步发展,实现更复杂、更智能的水下操作。
📄 摘要(原文)
Underwater robotic manipulation faces significant challenges due to complex fluid dynamics and unstructured environments, causing most manipulation systems to rely heavily on human teleoperation. In this paper, we introduce AquaBot, a fully autonomous manipulation system that combines behavior cloning from human demonstrations with self-learning optimization to improve beyond human teleoperation performance. With extensive real-world experiments, we demonstrate AquaBot's versatility across diverse manipulation tasks, including object grasping, trash sorting, and rescue retrieval. Our real-world experiments show that AquaBot's self-optimized policy outperforms a human operator by 41% in speed. AquaBot represents a promising step towards autonomous and self-improving underwater manipulation systems. We open-source both hardware and software implementation details.