Reconfigurable hydrostatics: Toward versatile and efficient load-bearing robotics
作者: Jeff Denis, Frederic Laberge, Jean-Sebastien Plante, Alexandre Girard
分类: cs.RO, eess.SY
发布日期: 2024-10-23 (更新: 2025-11-14)
期刊: Mechatronics, vol. 113, p. 103420, Oct. 2025
DOI: 10.1016/j.mechatronics.2025.103420
💡 一句话要点
提出可重构静液压驱动器,用于多功能、高效的负载机器人
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 静液压驱动 可重构机器人 负载机器人 外骨骼 能量效率
📋 核心要点
- 传统机器人驱动设计在负载能力、效率和通用性之间存在权衡,难以同时满足高性能需求。
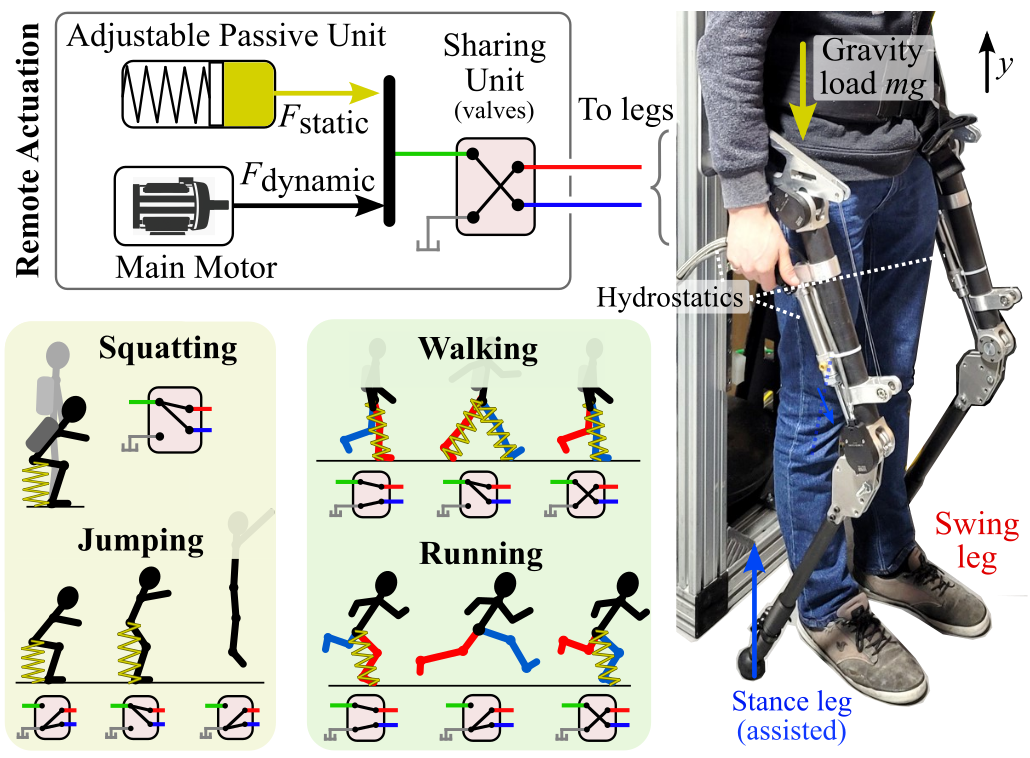
- 提出可重构静液压驱动器,通过在流体域集成被动力机制和共享机制,实现多功能和高效的负载承受。
- 实验结果表明,该驱动器能够有效跟踪多种运动模式下的地面反作用力,并且在行走时能耗显著降低。
📝 摘要(中文)
在可穿戴和腿式机器人设计中,驱动方式的选择面临诸多挑战。传统的全驱动设计虽然多功能,但在承受保守负载和需要反向驱动时,体积过大且效率低下。准被动和欠驱动设计虽然减少了电机数量和能量存储,但通常针对特定任务设计。除非未来的执行器在扭矩密度、反向驱动能力和效率方面有显著提升,否则通用且更强大的可穿戴机器人设计者将面临这些挑战。本文探索了一种解决此问题的设计范式:可重构静液压。研究表明,静液压驱动器可以在流体域中集成被动力机制和共享机制,同时保持多功能性。首先,通过分析研究比较了这两种机制对负载外骨骼电机需求的影响。然后,介绍了集成了这些机制的静液压概念,并使用了液压元件。案例研究分析表明,该概念在质量、效率和惯性方面优于全驱动方案。最后,在机器人腿上进行了实验,证明该驱动器概念可以在受控条件下满足预期的力跟踪、通用性和效率性能。该原型能够跟踪行走、跑步、下蹲和跳跃的垂直地面反作用力(GRF)曲线,并且行走的能耗降低了4.8倍。还分析了由于从一条腿切换到另一条腿引起的瞬态力行为,并提出了一些缓解措施。
🔬 方法详解
问题定义:现有机器人驱动系统在负载能力、效率和通用性之间存在固有的矛盾。全驱动系统虽然通用,但体积大、效率低,尤其是在承受静态负载时。欠驱动系统虽然效率高,但通常针对特定任务设计,缺乏通用性。因此,需要一种既能高效承受负载,又能保持多功能性的驱动方案。
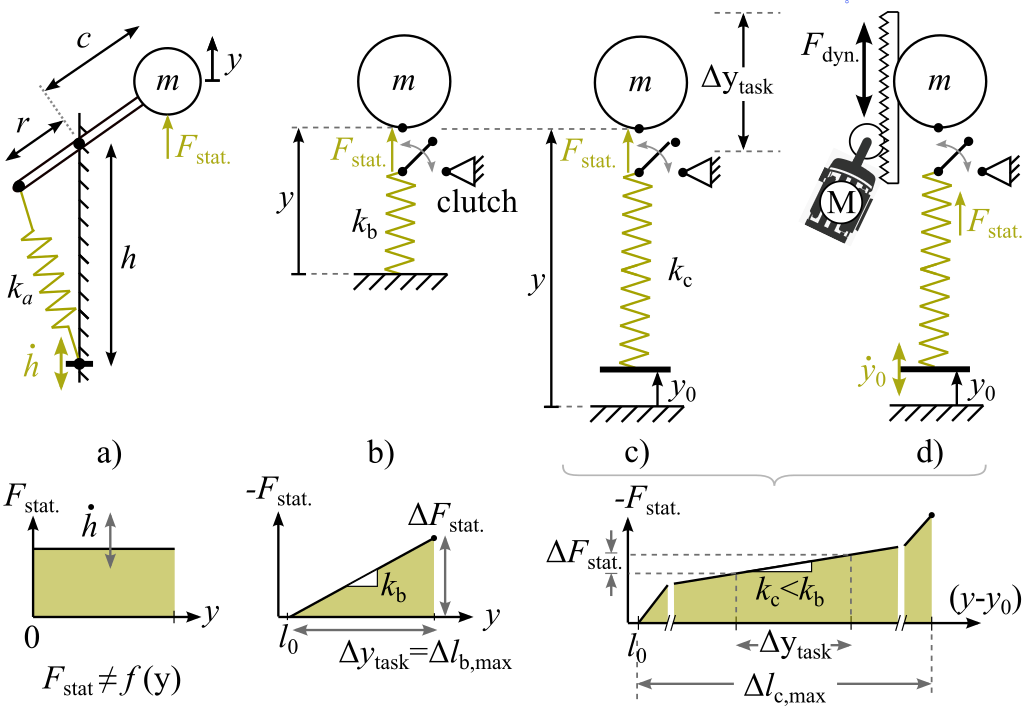
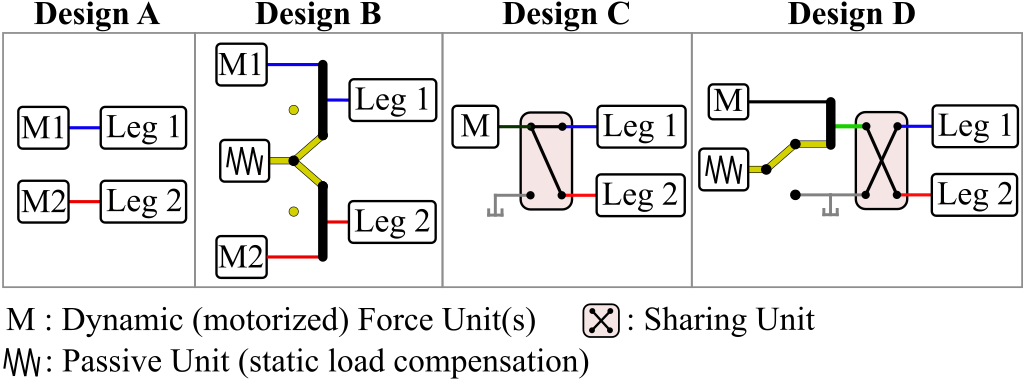
核心思路:论文的核心思路是利用静液压系统的特性,将被动力机制和力共享机制集成到流体域中。静液压系统能够传递较大的力,并且可以通过控制液压回路来实现力的调节和分配。通过集成被动元件,可以在承受静态负载时减少电机的能量消耗。力共享机制则允许在多个执行器之间分配负载,从而提高系统的整体效率。
技术框架:该研究提出的可重构静液压驱动器主要包含以下几个部分:液压缸、液压泵、液压阀、蓄能器和控制系统。液压缸用于产生驱动力,液压泵提供液压动力,液压阀用于控制液压回路,蓄能器用于存储能量,控制系统则负责协调各个部件的工作。通过调节液压阀的开度,可以实现对驱动力的精确控制。
关键创新:该论文的关键创新在于将被动力机制和力共享机制集成到静液压系统中。传统的静液压系统主要依靠主动控制来实现力的调节,而该论文提出的方法则利用被动元件来分担一部分负载,从而降低了电机的能量消耗。此外,力共享机制允许在多个执行器之间分配负载,从而提高了系统的整体效率。
关键设计:在具体设计上,论文重点考虑了液压元件的选择和液压回路的布局。为了实现高效的能量存储和释放,选择了合适的蓄能器。为了实现精确的力控制,采用了高性能的液压阀。此外,论文还对液压回路的布局进行了优化,以减少能量损失。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该可重构静液压驱动器能够有效跟踪行走、跑步、下蹲和跳跃等多种运动模式下的垂直地面反作用力(GRF)曲线。与传统的全驱动方案相比,在行走时能耗降低了4.8倍。此外,实验还分析了腿部切换时的瞬态力行为,并提出了相应的缓解措施,进一步提高了系统的稳定性。
🎯 应用场景
该研究成果可应用于外骨骼机器人、假肢、康复机器人等领域。通过提高负载能力和降低能耗,可以显著提升这些机器人的性能和实用性。此外,该技术还可以应用于工业机器人和自动化设备,提高生产效率和降低运营成本。未来,可重构静液压驱动器有望成为一种重要的机器人驱动方案。
📄 摘要(原文)
Wearable and legged robot designers face multiple challenges when choosing actuation. Traditional fully actuated designs using electric motors are multifunctional but oversized and inefficient for bearing conservative loads and for being backdrivable. Alternatively, quasi-passive and underactuated designs reduce the amount of motorization and energy storage, but are often designed for specific tasks. Designers of versatile and stronger wearable robots will face these challenges unless future actuators become very torque-dense, backdrivable and efficient This paper explores a design paradigm for addressing this issue: reconfigurable hydrostatics. We show that a hydrostatic actuator can integrate a passive force mechanism and a sharing mechanism in the fluid domain and still be multifunctional. First, an analytical study compares the effect of these two mechanisms on the motorization requirements in the context of a load-bearing exoskeleton. Then, the hydrostatic concept integrating these two mechanisms using hydraulic components is presented. A case study analysis shows the mass/efficiency/inertia benefits of the concept over a fully actuated one. Then, experiments are conducted on robotic legs to demonstrate that the actuator concept can meet the expected performance in terms of force tracking, versatility, and efficiency under controlled conditions. The proof-of-concept can track the vertical ground reaction force (GRF) profiles of walking, running, squatting, and jumping, and the energy consumption is 4.8x lower for walking. The transient force behaviors due to switching from one leg to the other are also analyzed along with some mitigation to improve them.