DARE: Diffusion Policy for Autonomous Robot Exploration
作者: Yuhong Cao, Jeric Lew, Jingsong Liang, Jin Cheng, Guillaume Sartoretti
分类: cs.RO
发布日期: 2024-10-22
💡 一句话要点
DARE:基于扩散策略的自主机器人探索方法
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 自主机器人探索 扩散模型 强化学习 路径规划 环境建模
📋 核心要点
- 传统机器人探索方法仅基于当前置信度优化路径,无法有效利用历史经验推理未知区域。
- DARE利用扩散模型学习专家探索策略,一次性生成探索路径,能推理未知区域的潜在结构。
- 实验表明,DARE在模拟和真实环境中均达到与SOTA方法相当的性能,并具备良好的泛化性。
📝 摘要(中文)
自主机器人探索需要机器人高效地探索和绘制未知环境的地图。与只能基于当前机器人置信度优化路径的传统方法相比,基于学习的方法显示出通过利用过去的经验来推理未知区域的潜力,从而提高性能。本文提出了一种新颖的生成方法DARE,它利用在专家演示上训练的扩散模型,可以通过一次性推理显式地生成探索路径。DARE建立在基于注意力的编码器和扩散策略模型之上,并引入了真值最优演示进行训练,以学习更好的探索模式。训练后的规划器可以推理部分置信度,以识别未知区域中的潜在结构,并在路径规划期间考虑这些区域。实验表明,DARE在模拟和实际场景中都达到了与传统和基于学习的最先进的探索规划器相当的性能,并具有良好的泛化能力。
🔬 方法详解
问题定义:自主机器人探索旨在让机器人在未知环境中高效地探索并构建地图。现有方法,如基于信息增益的规划器,通常只关注当前机器人所知的信息,而忽略了从历史经验中学习并推理未知区域的潜力。这导致探索效率低下,尤其是在复杂或具有潜在结构的场景中。
核心思路:DARE的核心思路是利用扩散模型学习专家探索策略,从而能够生成考虑了未知区域潜在结构的探索路径。通过模仿专家演示,DARE能够学习到探索的模式和策略,并在新的环境中进行泛化。扩散模型能够生成高质量的探索路径,并且可以通过一次性推理快速生成,提高了探索效率。
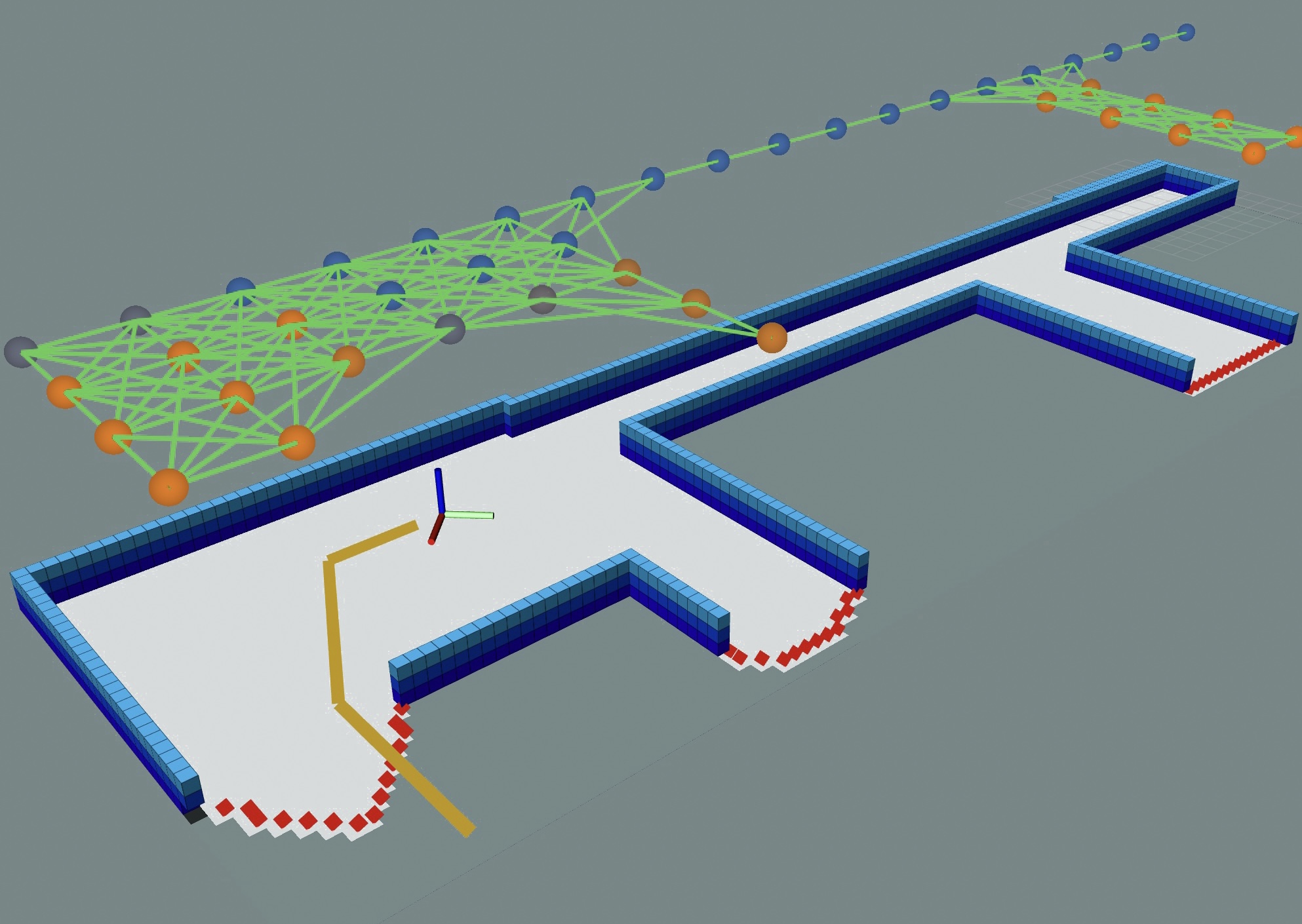
技术框架:DARE的整体框架包括一个基于注意力的编码器和一个扩散策略模型。编码器用于处理机器人的当前置信度地图,并提取特征表示。扩散策略模型则基于编码器的输出,生成探索路径。具体流程为:首先,编码器将当前置信度地图编码为潜在向量;然后,扩散模型从噪声开始,逐步去噪,最终生成一条探索路径;最后,机器人执行该路径,并更新其置信度地图,重复上述过程。
关键创新:DARE的关键创新在于将扩散模型应用于自主机器人探索问题,并利用专家演示进行训练。与传统的基于规则或优化的探索方法相比,DARE能够学习到更复杂的探索策略,并能够推理未知区域的潜在结构。此外,DARE的生成式方法能够一次性生成完整的探索路径,避免了传统方法中需要迭代优化的过程,提高了探索效率。
关键设计:DARE的关键设计包括:1) 基于注意力的编码器,用于提取置信度地图的特征;2) 扩散策略模型,用于生成探索路径;3) 专家演示数据集,用于训练扩散模型。扩散模型的损失函数包括重构损失和KL散度损失,用于保证生成路径的质量和多样性。网络结构采用U-Net架构,并引入了时间步嵌入和条件嵌入,以控制生成过程。
🖼️ 关键图片


📊 实验亮点
DARE在模拟和真实环境中的实验结果表明,其性能与传统和基于学习的最先进的探索规划器相当。具体而言,DARE在探索效率和地图构建质量方面均表现出色,并且具有良好的泛化能力。在某些场景下,DARE甚至优于其他方法,尤其是在需要推理未知区域潜在结构的场景中。
🎯 应用场景
DARE在自主导航、环境监测、灾后救援等领域具有广泛的应用前景。它可以帮助机器人在未知环境中快速有效地探索和绘制地图,从而提高任务完成效率和安全性。例如,在灾后救援中,DARE可以帮助机器人在倒塌的建筑物中快速搜索幸存者,并绘制出建筑物的内部结构图。
📄 摘要(原文)
Autonomous robot exploration requires a robot to efficiently explore and map unknown environments. Compared to conventional methods that can only optimize paths based on the current robot belief, learning-based methods show the potential to achieve improved performance by drawing on past experiences to reason about unknown areas. In this paper, we propose DARE, a novel generative approach that leverages diffusion models trained on expert demonstrations, which can explicitly generate an exploration path through one-time inference. We build DARE upon an attention-based encoder and a diffusion policy model, and introduce ground truth optimal demonstrations for training to learn better patterns for exploration. The trained planner can reason about the partial belief to recognize the potential structure in unknown areas and consider these areas during path planning. Our experiments demonstrate that DARE achieves on-par performance with both conventional and learning-based state-of-the-art exploration planners, as well as good generalizability in both simulations and real-life scenarios.