Agent-Based Emulation for Deploying Robot Swarm Behaviors
作者: Ricardo Vega, Kevin Zhu, Connor Mattson, Daniel S. Brown, Cameron Nowzari
分类: cs.RO, eess.SY
发布日期: 2024-10-21
备注: 8 pages, 6 figures, submitted to ICRA 2025
💡 一句话要点
提出基于Agent的机器人集群仿真方法,简化集群行为部署。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人集群 多智能体系统 具身Agent建模 仿真 自组织行为
📋 核心要点
- 现有机器人集群控制方法依赖复杂机器人,成本高昂,难以实际应用。
- 论文提出基于具身Agent建模的自底向上方法,利用简单机器人实现自组织集群行为。
- 通过现实-仿真-现实循环,论文成功复现已知集群行为,并意外发现新的集群行为。
📝 摘要(中文)
尽管机器人集群领域的研究取得了显著进展,但由于在多智能体系统中创建和控制集群行为的难度,它们尚未在解决实际问题中发挥作用。传统的自顶向下方法通常需要复杂的、资源密集型的机器人,限制了它们的实用性。本文提出了一种自底向上的方法,采用具身Agent建模与仿真方法,强调使用简单的机器人,并识别自然导致自组织集体行为的条件。通过集群的现实-仿真-现实(RSRS)过程,我们将真实世界的实验与仿真紧密结合,以重现已知的集群行为,并发现一种新的涌现行为,而无需消除甚至减少sim2real的差距。本文介绍了Agent-Based具身和仿真过程的开发,该过程平衡了运行物理集群实验的重要性,以及设置和运行单个包含20多个机器人的实验的耗时过程,通过利用低保真轻量级仿真来实现假设形成,从而指导物理实验。我们通过模拟文献中的两种已知行为来证明我们方法的有效性,并展示了意外“发现”的第三种行为。
🔬 方法详解
问题定义:现有机器人集群控制方法,特别是自顶向下的方法,通常需要复杂的机器人和精细的控制策略,导致成本高、部署难度大,难以在实际场景中应用。此外,设计能够涌现出期望行为的集群控制策略非常困难,需要大量的实验和调试。现有方法难以平衡仿真效率和真实性,导致仿真结果难以直接迁移到真实机器人系统。
核心思路:论文的核心思路是采用自底向上的方法,通过设计简单的机器人个体和局部交互规则,使其能够自组织地涌现出复杂的集群行为。利用Agent-Based Modeling and Simulation (ABMS) 方法,在仿真环境中快速探索不同的个体行为和环境条件,筛选出有潜力的策略,然后将其部署到真实机器人上进行验证。通过Reality-to-Simulation-to-Reality for Swarms (RSRS) 过程,迭代优化仿真模型和控制策略,最终实现期望的集群行为。
技术框架:该方法的技术框架主要包含以下几个阶段:1) 基于Agent的建模:设计简单的机器人个体模型,包括其感知、运动和通信能力。2) 仿真环境搭建:构建轻量级的仿真环境,模拟机器人之间的交互和环境的影响。3) 策略探索:在仿真环境中,通过调整个体行为参数或环境条件,探索不同的集群行为。4) 真实机器人实验:将仿真中筛选出的有潜力的策略部署到真实机器人上进行验证。5) 迭代优化:根据真实机器人实验的结果,反过来优化仿真模型和控制策略,形成一个闭环的迭代优化过程。
关键创新:该方法最重要的技术创新点在于其Agent-Based Emulation过程,它强调了低保真度仿真在集群行为设计中的作用。与传统的追求高精度仿真的方法不同,该方法侧重于利用轻量级仿真快速探索策略空间,并通过真实机器人实验进行验证和优化。这种方法能够显著降低集群行为设计的成本和时间,并能够发现一些意外的、有趣的集群行为。
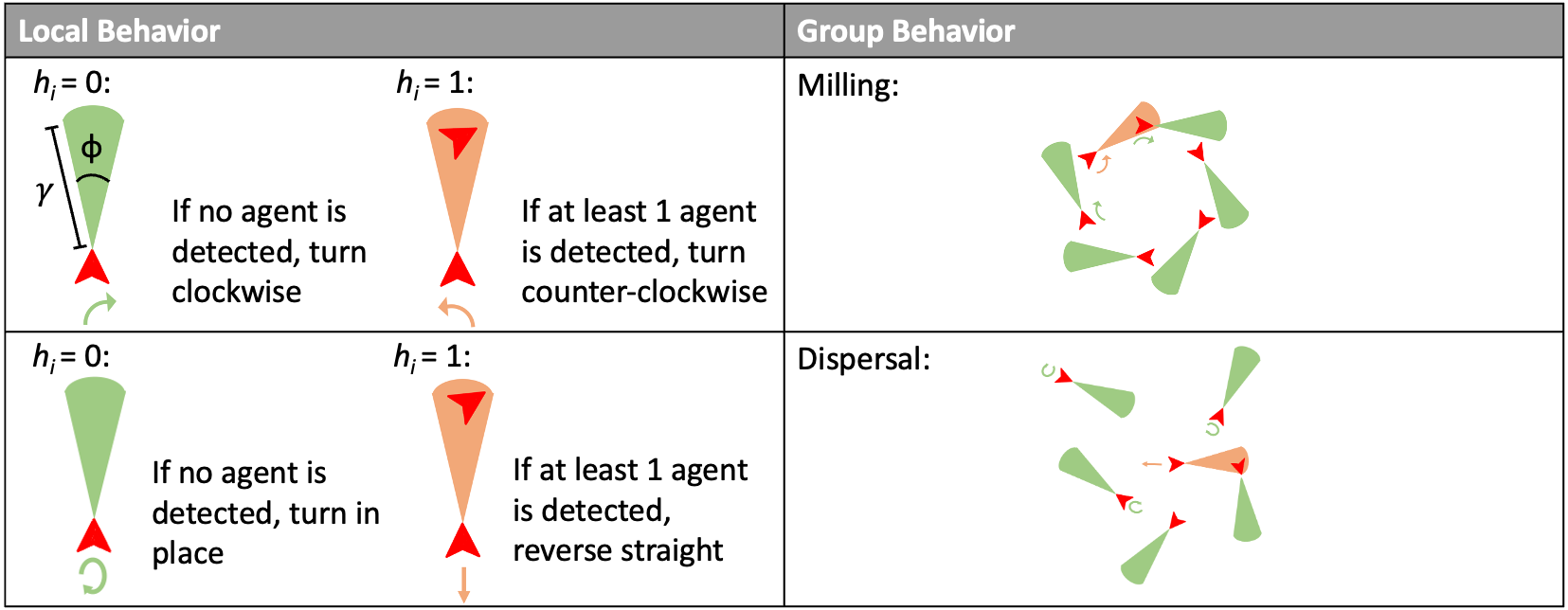
关键设计:论文中没有详细描述具体的参数设置、损失函数或网络结构等技术细节。但是,可以推断出一些关键的设计考虑:1) 个体行为规则的设计:需要仔细设计个体机器人的行为规则,例如避障、跟随、聚集等,以保证集群能够涌现出期望的行为。2) 仿真环境的简化:为了提高仿真效率,需要对仿真环境进行简化,例如忽略一些次要的物理因素。3) 真实机器人实验的验证:需要设计合理的真实机器人实验,以验证仿真结果的有效性,并收集数据用于优化仿真模型。
🖼️ 关键图片

📊 实验亮点
论文通过仿真成功复现了文献中已知的两种集群行为,验证了该方法的有效性。更重要的是,论文意外发现了一种新的集群行为,展示了该方法在探索未知集群行为方面的潜力。虽然论文没有给出具体的性能数据,但其强调了仿真在集群行为设计中的作用,并提供了一种低成本、高效的集群行为设计方法。
🎯 应用场景
该研究成果可应用于多种领域,例如:搜索救援、环境监测、农业生产、物流运输等。通过设计简单的机器人个体和局部交互规则,可以实现大规模的集群协作,完成复杂的任务。该方法降低了机器人集群部署的门槛,使得更多的人可以利用机器人集群解决实际问题,具有广阔的应用前景。
📄 摘要(原文)
Despite significant research, robotic swarms have yet to be useful in solving real-world problems, largely due to the difficulty of creating and controlling swarming behaviors in multi-agent systems. Traditional top-down approaches in which a desired emergent behavior is produced often require complex, resource-heavy robots, limiting their practicality. This paper introduces a bottom-up approach by employing an Embodied Agent-Based Modeling and Simulation approach, emphasizing the use of simple robots and identifying conditions that naturally lead to self-organized collective behaviors. Using the Reality-to-Simulation-to-Reality for Swarms (RSRS) process, we tightly integrate real-world experiments with simulations to reproduce known swarm behaviors as well as discovering a novel emergent behavior without aiming to eliminate or even reduce the sim2real gap. This paper presents the development of an Agent-Based Embodiment and Emulation process that balances the importance of running physical swarming experiments and the prohibitively time-consuming process of even setting up and running a single experiment with 20+ robots by leveraging low-fidelity lightweight simulations to enable hypothesis-formation to guide physical experiments. We demonstrate the usefulness of our methods by emulating two known behaviors from the literature and show a third behavior `discovered' by accident.