ARCADE: Scalable Demonstration Collection and Generation via Augmented Reality for Imitation Learning
作者: Yue Yang, Bryce Ikeda, Gedas Bertasius, Daniel Szafir
分类: cs.RO
发布日期: 2024-10-21
💡 一句话要点
ARCADE:利用增强现实技术实现可扩展的示教数据收集与生成,用于模仿学习
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 机器人模仿学习 增强现实 数据增强 行为克隆 机器人操作
📋 核心要点
- 机器人模仿学习面临数据收集困难,传统方法耗时且用户体验差,限制了其应用。
- ARCADE框架利用增强现实技术简化数据收集,并从少量人工示教中自动生成大量合成数据。
- 实验表明,ARCADE框架能快速训练机器人策略,并在多个任务中取得良好效果,包括真实家庭场景。
📝 摘要(中文)
机器人模仿学习(IL)是机器人学习中的一项关键技术,智能体通过模仿人类演示来学习。然而,IL面临着可扩展性挑战,这源于非用户友好的演示收集方法以及为有效训练而需要的大量演示数据。为了解决这个问题,我们引入了用于收集和生成演示数据的增强现实(ARCADE)框架,旨在扩大机器人操作任务的演示收集规模。我们的框架结合了两个关键功能:1)利用AR技术简化演示收集过程,用户只需像日常任务一样用手操作即可;2)能够从单个人类演示中自动生成额外的合成演示,从而显著减少用户的工作量和时间。我们评估了ARCADE在真实Fetch机器人上的性能,涉及三个机器人任务:三点到达、推物和抓取放置。使用我们的框架,我们能够使用经典的IL算法——Vanilla Behavioral Cloning (BC) 快速训练策略,并在这些任务中表现出色。我们还将ARCADE部署到真实的家庭任务——倒水中,成功率达到80%。
🔬 方法详解
问题定义:机器人模仿学习需要大量的示教数据,但现有数据收集方法效率低、成本高,难以满足实际应用需求。用户需要花费大量时间进行示教,且示教过程复杂,用户体验差。因此,如何降低示教成本,提高数据收集效率是亟待解决的问题。
核心思路:ARCADE框架的核心思路是利用增强现实技术简化示教过程,并结合数据增强技术,从少量人工示教中生成大量合成数据。通过AR技术,用户可以直接在真实环境中进行示教,无需复杂的设备和操作。同时,利用算法自动生成新的示教数据,减少人工示教的需求。
技术框架:ARCADE框架包含两个主要模块:AR示教收集模块和合成数据生成模块。AR示教收集模块利用AR技术,将虚拟物体叠加到真实环境中,用户通过操作虚拟物体来示教机器人。收集到的示教数据被传递到合成数据生成模块,该模块利用算法从单个人工示教中生成多个合成示教数据。最后,使用这些数据训练机器人策略。
关键创新:ARCADE框架的关键创新在于结合了AR技术和数据增强技术,实现了可扩展的示教数据收集和生成。与传统方法相比,ARCADE框架显著降低了示教成本,提高了数据收集效率。此外,ARCADE框架还能够生成高质量的合成数据,进一步提升了机器人策略的性能。
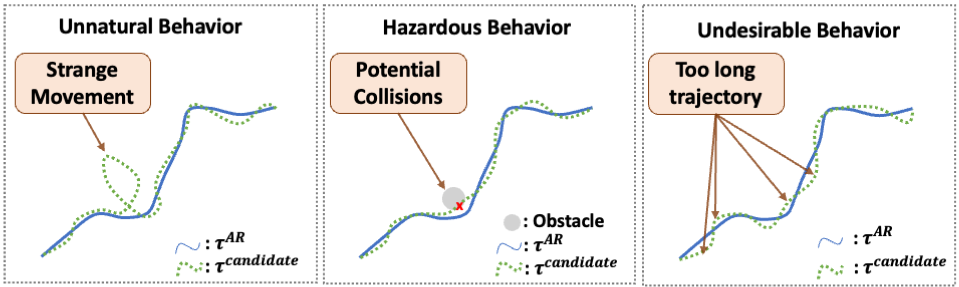
关键设计:在AR示教收集模块中,使用了基于视觉的跟踪算法,确保虚拟物体与真实环境的精确对齐。在合成数据生成模块中,使用了数据增强技术,例如随机扰动、轨迹变形等,生成多样化的合成数据。损失函数采用行为克隆损失,直接学习人类的动作。
🖼️ 关键图片


📊 实验亮点
实验结果表明,使用ARCADE框架训练的机器人策略在三点到达、推物和抓取放置等任务中表现出色。在真实的家庭任务——倒水中,成功率达到80%。与传统方法相比,ARCADE框架显著降低了示教成本,提高了数据收集效率,并提升了机器人策略的性能。
🎯 应用场景
ARCADE框架可应用于各种机器人操作任务,例如家庭服务机器人、工业机器人等。通过简化示教过程和降低数据收集成本,ARCADE框架能够加速机器人技术的普及和应用。未来,该框架还可以扩展到更复杂的任务,例如多机器人协作、人机协作等。
📄 摘要(原文)
Robot Imitation Learning (IL) is a crucial technique in robot learning, where agents learn by mimicking human demonstrations. However, IL encounters scalability challenges stemming from both non-user-friendly demonstration collection methods and the extensive time required to amass a sufficient number of demonstrations for effective training. In response, we introduce the Augmented Reality for Collection and generAtion of DEmonstrations (ARCADE) framework, designed to scale up demonstration collection for robot manipulation tasks. Our framework combines two key capabilities: 1) it leverages AR to make demonstration collection as simple as users performing daily tasks using their hands, and 2) it enables the automatic generation of additional synthetic demonstrations from a single human-derived demonstration, significantly reducing user effort and time. We assess ARCADE's performance on a real Fetch robot across three robotics tasks: 3-Waypoints-Reach, Push, and Pick-And-Place. Using our framework, we were able to rapidly train a policy using vanilla Behavioral Cloning (BC), a classic IL algorithm, which excelled across these three tasks. We also deploy ARCADE on a real household task, Pouring-Water, achieving an 80% success rate.