Neural Predictor for Flight Control with Payload
作者: Ao Jin, Chenhao Li, Qinyi Wang, Ya Liu, Panfeng Huang, Fan Zhang
分类: cs.RO, eess.SY
发布日期: 2024-10-21 (更新: 2025-05-11)
备注: This paper (longer version) has been accepted in RA-L
🔗 代码/项目: GITHUB
💡 一句话要点
提出基于神经预测器的飞行控制方法,提升负载无人机抗扰动性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机控制 悬挂负载 神经预测器 模型预测控制 混合动力学模型
📋 核心要点
- 悬挂负载无人机易受负载和残余动力学扰动,传统方法难以准确建模这些扰动,影响控制精度。
- 提出神经预测器,通过学习建模负载和残余动力学引起的力/力矩,构建混合动力学模型。
- 实验表明,神经预测器能准确捕捉扰动,显著提升闭环控制性能,优于现有学习型估计器。
📝 摘要(中文)
近年来,用于运输悬挂负载的空中机器人作为一种自由浮动机械臂引起了人们的极大兴趣。然而,负载引起的力/力矩和残余动力学将给空中机器人带来未建模的扰动,从而对闭环性能产生负面影响。与基于估计的方法不同,本文提出了一种基于学习的方法——神经预测器,将负载和残余动力学引起的力/力矩建模为一个动力系统。它产生了一个混合模型,将第一性原理动力学与学习到的动力学相结合。然后将该混合模型集成到MPC框架中,以提高闭环性能。数值模拟和实际飞行实验都广泛验证了所提出框架的有效性。结果表明,我们的方法可以准确地捕捉悬挂负载和残余动力学引起的力/力矩,快速响应它们的变化,并显著提高闭环性能。特别是,神经预测器优于最先进的基于学习的估计器,并且在需要更少样本的情况下,将力和力矩估计误差分别降低了高达66.15%和33.33%。所提出的神经预测器的代码可在https://github.com/NPU-RCIR/Neural-Predictor.git找到。
🔬 方法详解
问题定义:针对悬挂负载无人机控制中,负载和残余动力学引起的未建模扰动问题,现有方法难以准确估计这些扰动,导致控制性能下降。传统方法依赖精确的动力学模型,但实际应用中难以获得,基于估计的方法存在滞后和精度问题。
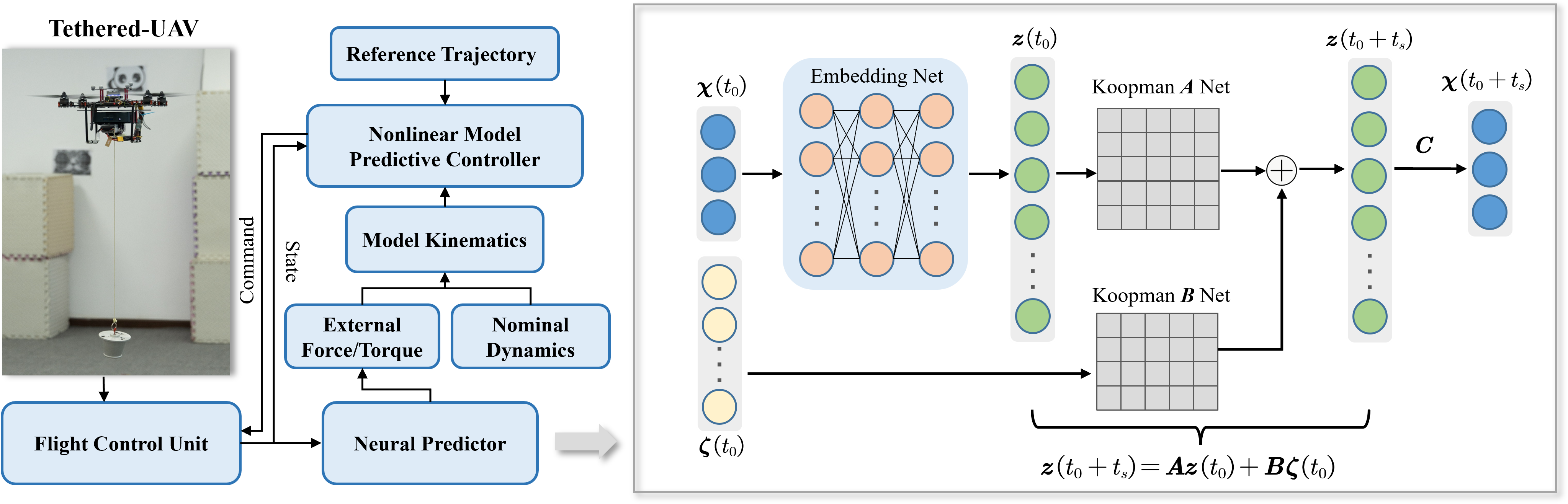
核心思路:论文的核心思路是利用神经网络学习负载和残余动力学产生的力/力矩,将其建模为一个动力系统。通过结合第一性原理动力学和学习到的动力学,构建一个混合模型,从而更准确地预测无人机的运动状态。这种方法旨在克服传统方法对精确模型的依赖,并提高对未知扰动的鲁棒性。
技术框架:整体框架包含以下几个主要模块:1) 数据采集:通过传感器获取无人机的状态数据和控制输入。2) 神经预测器训练:利用采集的数据训练神经网络,学习负载和残余动力学引起的力/力矩。3) 混合模型构建:将第一性原理动力学模型与训练好的神经预测器相结合,得到混合动力学模型。4) 模型预测控制(MPC):将混合模型集成到MPC框架中,用于生成最优控制指令。
关键创新:最重要的技术创新点在于提出了神经预测器,它是一种基于学习的方法,能够直接建模负载和残余动力学引起的力/力矩。与传统的基于估计的方法相比,神经预测器能够更准确、更快速地响应扰动的变化,从而提高控制性能。此外,混合模型的构建也使得模型更加精确。
关键设计:神经预测器的具体网络结构未知,但可以推测其输入包括无人机的状态(位置、速度、姿态等)和控制输入,输出为负载和残余动力学引起的力/力矩。损失函数的设计目标是最小化预测的力/力矩与实际值之间的误差。MPC框架的关键参数包括预测时域长度、控制时域长度、状态约束和控制约束等。这些参数需要根据具体的无人机和负载特性进行调整。
🖼️ 关键图片


📊 实验亮点
实验结果表明,所提出的神经预测器能够准确捕捉悬挂负载和残余动力学引起的力/力矩,并显著提高闭环性能。与最先进的基于学习的估计器相比,神经预测器在需要更少样本的情况下,将力和力矩估计误差分别降低了高达66.15%和33.33%。这些数据表明,该方法在精度和效率方面都具有显著优势。
🎯 应用场景
该研究成果可应用于物流运输、建筑施工、农业植保等领域,尤其是在需要无人机携带悬挂负载的场景下。通过提高无人机的控制精度和鲁棒性,可以实现更安全、更高效的作业,并降低对操作人员的技能要求。未来,该方法有望推广到其他类型的机器人控制中。
📄 摘要(原文)
Aerial robotics for transporting suspended payloads as the form of freely-floating manipulator are growing great interest in recent years. However, the force/torque caused by payload and residual dynamics will introduce unmodeled perturbations to the aerial robotics, which negatively affects the closed-loop performance. Different from estimation-like methods, this paper proposes Neural Predictor, a learning-based approach to model force/torque induced by payload and residual dynamics as a dynamical system. It yields a hybrid model that combines the first-principles dynamics with the learned dynamics. The hybrid model is then integrated into a MPC framework to improve closed-loop performance. Effectiveness of proposed framework is verified extensively in both numerical simulations and real-world flight experiments. The results indicate that our approach can capture force/torque caused by suspended payload and residual dynamics accurately, respond quickly to the changes of them and improve the closed-loop performance significantly. In particular, Neural Predictor outperforms a state-of-the-art learning-based estimator and has reduced the force and torque estimation errors by up to 66.15% and 33.33% while requiring less samples. The code of proposed Neural Predictor can be found at https://github.com/NPU-RCIR/Neural-Predictor.git.