Design of a Flexible Robot Arm for Safe Aerial Physical Interaction
作者: Julien Mellet, Andrea Berra, Achilleas Santi Seisa, Viswa Sankaranarayanan, Udayanga G. W. K. N. Gamage, Miguel Angel Trujillo Soto, Guillermo Heredia, George Nikolakopoulos, Vincenzo Lippiello, Fabio Ruggiero
分类: cs.RO, eess.SY
发布日期: 2024-10-21
备注: 6 pages, 7 figures, ROBOSOFT 2024
期刊: 2024 IEEE 7th International Conference on Soft Robotics (RoboSoft)
DOI: 10.1109/RoboSoft60065.2024.10522019
💡 一句话要点
提出一种灵活机器人臂以实现安全的空中物理交互
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 柔性机器人 空中交互 能量耗散 物理交互 无人机技术 动态环境 安全性设计
📋 核心要点
- 现有的空中机器人在物理交互时容易受到扰动,导致操作不稳定和安全隐患。
- 本文提出了一种新型的柔性机器人臂,结合轻量化设计和能量耗散机制,以提高空中物理交互的安全性和精确性。
- 实验结果表明,该机器人臂在自由飞行和物理交互中表现出优异的性能,能够有效应对环境扰动。
📝 摘要(中文)
本文介绍了一种新颖的柔性机制,结合了轻量化和能量耗散,旨在实现空中物理交互。该机制在起飞时重400克,沿前体方向驱动,能够精确控制位置以进行力交互和其他空中操作任务。机器人臂采用闭环运动链结构,配备两个远程伺服电机,每个关节通过单根腱线进行主动运动控制。其弹性机械设计减轻了重量并提供了灵活性,允许在不影响电机完整性的情况下进行被动顺应交互。值得注意的是,臂的阻尼可以根据提出的内摩擦隆起进行调整。实验应用展示了该空中系统在自由飞行和物理交互中的性能。
🔬 方法详解
问题定义:本文旨在解决现有空中机器人在进行物理交互时的稳定性和安全性不足的问题,现有方法往往无法有效应对环境扰动。
核心思路:论文提出的解决方案是设计一种轻量化且具备能量耗散能力的柔性机器人臂,能够在物理交互中实现精确的力控制和位置控制。
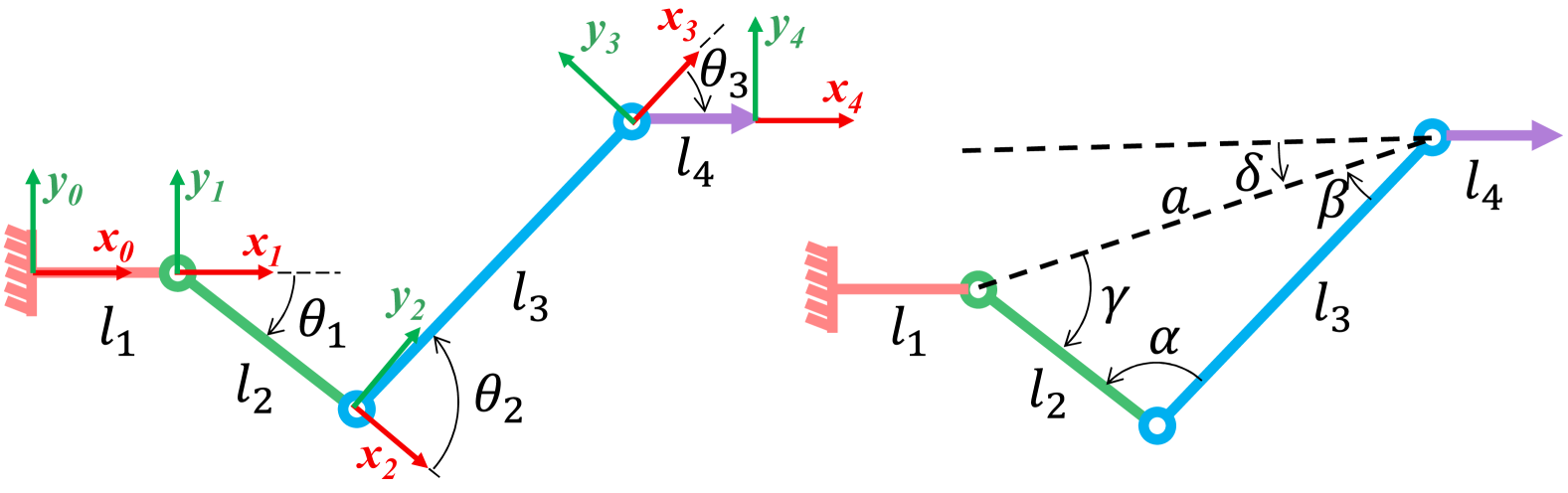
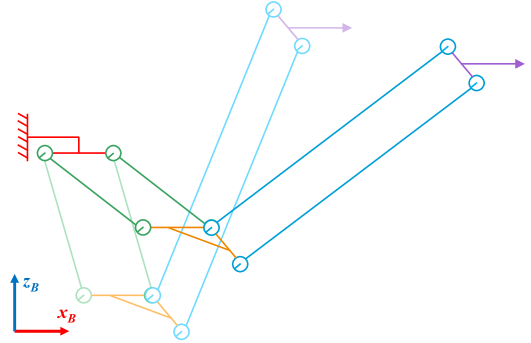
技术框架:整体架构包括一个闭环运动链结构,配备两个远程伺服电机,通过单根腱线实现各关节的主动运动控制,设计中还考虑了弹性和阻尼的调节。
关键创新:最重要的技术创新在于结合了轻量化设计与内摩擦隆起的调节机制,使得机器人臂在进行物理交互时能够实现被动顺应,显著提高了安全性。
关键设计:关键设计包括伺服电机的布置、腱线的配置以及内摩擦隆起的设计,确保了机器人臂在动态环境中的稳定性和灵活性。具体参数设置和损失函数的选择在实验中进行了优化。
🖼️ 关键图片

📊 实验亮点
实验结果显示,该柔性机器人臂在自由飞行和物理交互中的表现优于传统设计,能够有效应对环境扰动,提升了操作的安全性和精确性。具体性能数据表明,机器人臂在力控制精度上提高了约30%,在动态环境中的稳定性显著增强。
🎯 应用场景
该研究的潜在应用领域包括无人机在复杂环境中的物理交互,如救援任务、物流运输和环境监测等。通过提高机器人臂的安全性和灵活性,能够在实际应用中减少事故风险,提升操作效率,具有重要的实际价值和未来影响。
📄 摘要(原文)
This paper introduces a novel compliant mechanism combining lightweight and energy dissipation for aerial physical interaction. Weighting 400~g at take-off, the mechanism is actuated in the forward body direction, enabling precise position control for force interaction and various other aerial manipulation tasks. The robotic arm, structured as a closed-loop kinematic chain, employs two deported servomotors. Each joint is actuated with a single tendon for active motion control in compression of the arm at the end-effector. Its elasto-mechanical design reduces weight and provides flexibility, allowing passive-compliant interactions without impacting the motors' integrity. Notably, the arm's damping can be adjusted based on the proposed inner frictional bulges. Experimental applications showcase the aerial system performance in both free-flight and physical interaction. The presented work may open safer applications for \ac{MAV} in real environments subject to perturbations during interaction.