AssemblyComplete: 3D Combinatorial Construction with Deep Reinforcement Learning
作者: Alan Chen, Changliu Liu
分类: cs.RO, cs.AI
发布日期: 2024-10-20
备注: Submitted to 2025 American Control Conference (ACC)
💡 一句话要点
提出基于深度强化学习的AssemblyComplete框架,用于三维组合结构的自动补全。
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 深度强化学习 三维重建 组合结构 自动装配 机器人学习
📋 核心要点
- 现有机器人装配方法难以理解不完整装配体的意图,且在复杂物理约束下完成装配具有挑战。
- 提出AssemblyComplete框架,利用深度强化学习使机器人能够推理装配意图并学习构建策略。
- 实验证明该框架在多种装配场景中具有可行性和鲁棒性,能够有效完成未见过的结构的装配。
📝 摘要(中文)
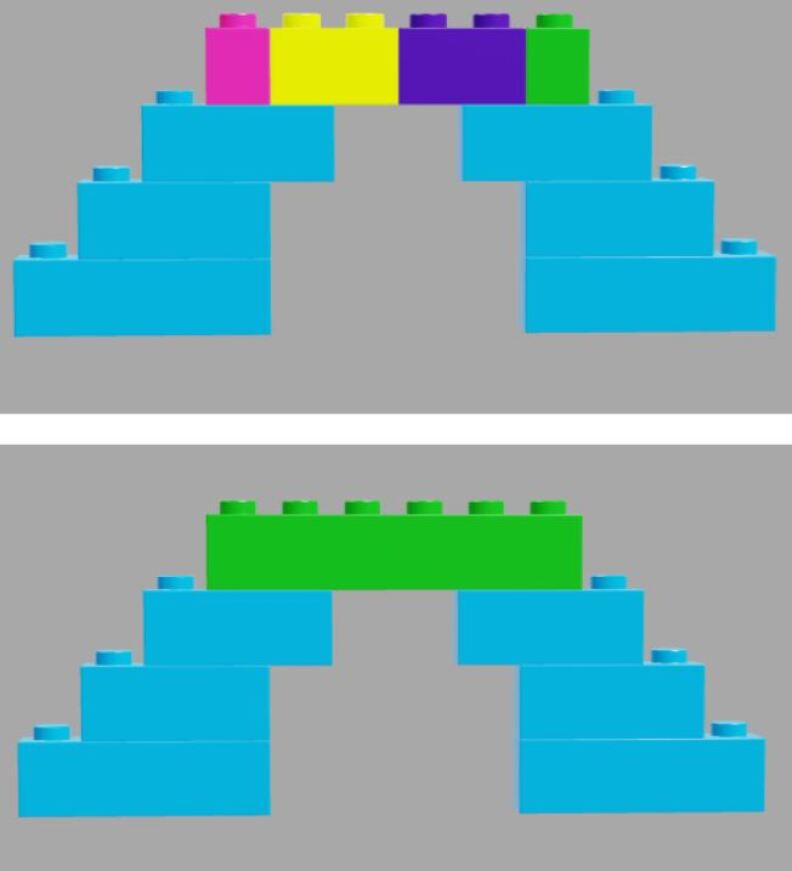
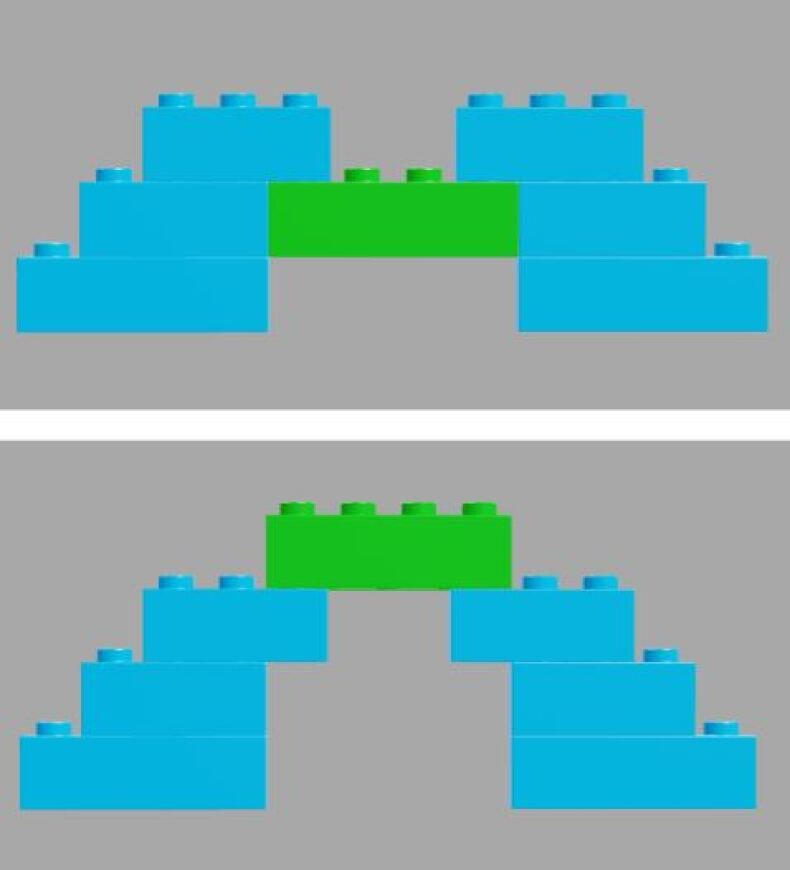
本文提出了一种三维组合结构补全方法,旨在教会机器人在自动装配任务中适应真实世界的协作。该方法研究了机器人理解不完整装配体的原始意图并在没有人工指导的情况下完成缺失部分的能力,并使用组合单元基元(即乐高积木)进行演示。组合装配具有挑战性,因为它存在可能的装配组合和复杂的物理约束(例如,没有积木碰撞、结构稳定性、库存约束等)。为了应对这些挑战,本文提出了一个两部分的深度强化学习(DRL)框架,该框架致力于教会机器人理解不完整装配体的目标,并学习完成装配的构建策略。机器人查询一个稳定的对象库,以促进装配推理并指导学习。除了机器人策略之外,还开发了一个动作掩码,以排除违反面向对象构建的物理约束的无效动作。实验结果表明,该框架在各种装配场景中的可行性和鲁棒性,机器人能够在解决方案和运行时间质量方面满足实际装配要求。此外,结果表明,所提出的框架能够有效地推断和组装未见过的独特对象类型的不完整结构。
🔬 方法详解
问题定义:论文旨在解决三维组合结构的自动补全问题,特别是在给定不完整结构的情况下,如何让机器人理解原始设计意图并完成剩余部分的装配。现有方法在处理复杂物理约束(如碰撞避免、结构稳定)和大量组合可能性时面临挑战,难以保证装配的质量和效率。
核心思路:论文的核心思路是利用深度强化学习(DRL)训练一个机器人代理,使其能够根据当前不完整的装配状态,逐步选择合适的积木并放置到正确的位置,最终完成整个结构。通过奖励函数鼓励代理完成装配,并通过动作掩码排除无效动作,从而保证装配的物理可行性。
技术框架:该框架包含两个主要部分:1) 状态表示和奖励函数设计,用于定义强化学习环境;2) 基于深度神经网络的策略学习,用于训练机器人代理。具体流程如下:首先,机器人观察当前不完整的装配状态;然后,根据策略网络选择一个动作(即选择一个积木并放置到某个位置);接着,环境执行该动作并更新装配状态;最后,根据奖励函数计算奖励值,并用于更新策略网络。
关键创新:该论文的关键创新在于将深度强化学习应用于三维组合结构的自动补全问题,并设计了一个有效的动作掩码机制,用于排除违反物理约束的无效动作。此外,论文还引入了一个稳定的对象库,用于辅助机器人进行装配推理和学习。
关键设计:动作掩码的设计是关键。它根据当前装配状态和物理约束,动态地屏蔽掉无效的动作,从而减少了搜索空间,提高了学习效率。奖励函数的设计也至关重要,它需要能够有效地引导机器人完成装配,同时避免出现不稳定的结构。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该框架能够在各种装配场景中有效地完成三维组合结构的补全任务,并且能够处理未见过的对象类型。在特定场景下,该方法能够达到接近100%的成功率,并且在运行时间方面也具有较好的表现。与传统的基于规则的方法相比,该方法具有更强的泛化能力和适应性。
🎯 应用场景
该研究成果可应用于自动化装配、建筑设计、以及机器人辅助教学等领域。例如,在智能制造中,机器人可以根据不完整的设计图纸自动完成产品的装配。在建筑设计中,可以辅助设计师快速生成各种结构方案。在教育领域,可以用于培养学生的空间想象力和创造力。
📄 摘要(原文)
A critical goal in robotics and autonomy is to teach robots to adapt to real-world collaborative tasks, particularly in automatic assembly. The ability of a robot to understand the original intent of an incomplete assembly and complete missing features without human instruction is valuable but challenging. This paper introduces 3D combinatorial assembly completion, which is demonstrated using combinatorial unit primitives (i.e., Lego bricks). Combinatorial assembly is challenging due to the possible assembly combinations and complex physical constraints (e.g., no brick collisions, structure stability, inventory constraints, etc.). To address these challenges, we propose a two-part deep reinforcement learning (DRL) framework that tackles teaching the robot to understand the objective of an incomplete assembly and learning a construction policy to complete the assembly. The robot queries a stable object library to facilitate assembly inference and guide learning. In addition to the robot policy, an action mask is developed to rule out invalid actions that violate physical constraints for object-oriented construction. We demonstrate the proposed framework's feasibility and robustness in a variety of assembly scenarios in which the robot satisfies real-life assembly with respect to both solution and runtime quality. Furthermore, results demonstrate that the proposed framework effectively infers and assembles incomplete structures for unseen and unique object types.