LLM4AD: Large Language Models for Autonomous Driving -- Concept, Review, Benchmark, Experiments, and Future Trends
作者: Can Cui, Yunsheng Ma, Sung-Yeon Park, Zichong Yang, Yupeng Zhou, Juanwu Lu, Juntong Peng, Jiaru Zhang, Ruqi Zhang, Lingxi Li, Yaobin Chen, Jitesh H. Panchal, Amr Abdelraouf, Rohit Gupta, Kyungtae Han, Ziran Wang
分类: cs.RO, cs.AI, cs.CL, cs.HC
发布日期: 2024-10-20 (更新: 2025-11-12)
💡 一句话要点
提出LLM4AD概念,综述现有研究,构建基准测试,探索大语言模型在自动驾驶中的应用。
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 自动驾驶 大型语言模型 LLM4AD 自然语言处理 决策控制
📋 核心要点
- 现有自动驾驶系统在复杂环境理解和决策方面存在不足,难以实现高度智能化和个性化。
- 论文提出LLM4AD概念,利用LLM的自然语言理解和推理能力,增强自动驾驶系统的感知、决策和控制能力。
- 通过基准测试、仿真实验和真实世界实验,验证了LLM4AD在自动驾驶任务中的有效性和潜力,并探讨了未来发展趋势。
📝 摘要(中文)
随着大型语言模型(LLM)的广泛应用和成功发展,将其应用于自动驾驶技术的需求日益增长。凭借其自然语言理解和推理能力,LLM有潜力增强自动驾驶系统的各个方面,从感知和场景理解到交互式决策。本文首先介绍了为自动驾驶设计大型语言模型(LLM4AD)的新概念,然后回顾了现有的LLM4AD研究。接着,我们提出了一个综合基准,用于评估LLM4AD系统的指令跟随和推理能力,包括LaMPilot-Bench、CARLA Leaderboard 1.0模拟基准和用于多视角视觉问答的NuPlanQA。此外,我们在自动驾驶车辆平台上进行了广泛的真实世界实验,检验了用于个性化决策和运动控制的云端和边缘LLM部署。接下来,我们探索了将语言扩散模型集成到自动驾驶中的未来趋势,并以所提出的ViLaD(视觉-语言扩散)框架为例。最后,我们讨论了LLM4AD的主要挑战,包括延迟、部署、安全和隐私、安全性、信任和透明度以及个性化。
🔬 方法详解
问题定义:现有自动驾驶系统在处理复杂场景、进行人机交互和实现个性化驾驶方面存在局限性。传统方法难以有效利用自然语言指令进行决策,缺乏对驾驶场景的深层语义理解和推理能力。此外,部署和推理延迟也是实际应用中的挑战。
核心思路:论文的核心思路是将大型语言模型(LLM)的强大自然语言处理能力引入自动驾驶系统,构建LLM4AD框架。通过LLM对驾驶场景进行语义理解、推理和决策,从而提升自动驾驶系统的智能化水平和人机交互能力。利用LLM的指令跟随能力,实现基于自然语言指令的自动驾驶控制。
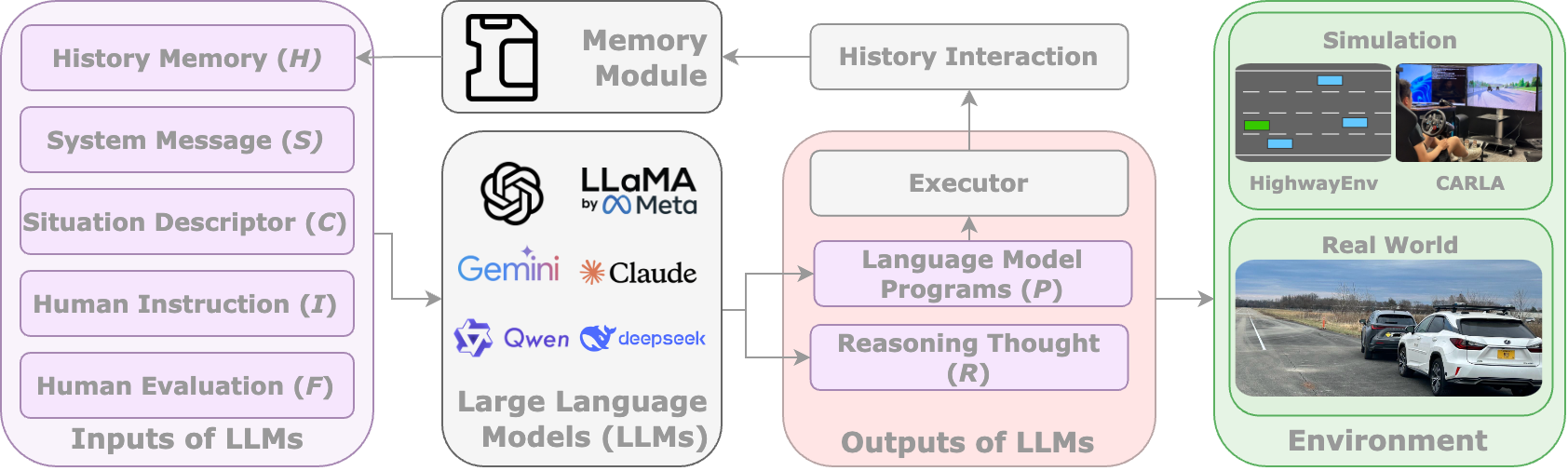
技术框架:LLM4AD框架包含感知模块、LLM推理模块和控制模块。感知模块负责获取环境信息,LLM推理模块利用LLM对环境信息进行理解和推理,生成驾驶决策,控制模块根据LLM的决策执行车辆控制。论文还提出了ViLaD(Vision-Language Diffusion)框架,探索了将视觉-语言扩散模型集成到自动驾驶中的可能性。
关键创新:论文的关键创新在于提出了LLM4AD的概念,并构建了相应的基准测试和实验平台。通过将LLM引入自动驾驶系统,实现了基于自然语言指令的自动驾驶控制,提升了系统的智能化水平和人机交互能力。ViLaD框架探索了利用扩散模型进行自动驾驶场景生成的可能性。
关键设计:论文设计了LaMPilot-Bench基准测试,用于评估LLM4AD系统的指令跟随和推理能力。在实验中,使用了CARLA Leaderboard 1.0模拟基准和NuPlanQA数据集进行评估。针对实际部署,论文探讨了云端和边缘LLM部署方案,并对延迟、安全和隐私等问题进行了讨论。具体LLM的选择和微调策略(如LoRA)也是关键设计细节,但论文中未详细展开。
🖼️ 关键图片

📊 实验亮点
论文提出了LaMPilot-Bench基准测试,并在CARLA Leaderboard 1.0和NuPlanQA数据集上进行了评估。真实世界实验验证了LLM4AD在自动驾驶车辆平台上的可行性,展示了其在个性化决策和运动控制方面的潜力。虽然论文中没有给出具体的性能提升数据,但实验结果表明LLM4AD能够有效提升自动驾驶系统的智能化水平。
🎯 应用场景
LLM4AD技术可应用于各种自动驾驶场景,如自动驾驶出租车、物流配送、公共交通等。该技术能够提升自动驾驶系统的智能化水平和人机交互能力,实现更安全、舒适和个性化的驾驶体验。未来,LLM4AD有望成为实现高级别自动驾驶的关键技术。
📄 摘要(原文)
With the broader adoption and highly successful development of Large Language Models (LLMs), there has been growing interest and demand for applying LLMs to autonomous driving technology. Driven by their natural language understanding and reasoning capabilities, LLMs have the potential to enhance various aspects of autonomous driving systems, from perception and scene understanding to interactive decision-making. In this paper, we first introduce the novel concept of designing Large Language Models for Autonomous Driving (LLM4AD), followed by a review of existing LLM4AD studies. Then, we propose a comprehensive benchmark for evaluating the instruction-following and reasoning abilities of LLM4AD systems, which includes LaMPilot-Bench, CARLA Leaderboard 1.0 Benchmark in simulation and NuPlanQA for multi-view visual question answering. Furthermore, we conduct extensive real-world experiments on autonomous vehicle platforms, examining both on-cloud and on-edge LLM deployment for personalized decision-making and motion control. Next, we explore the future trends of integrating language diffusion models into autonomous driving, exemplified by the proposed ViLaD (Vision-Language Diffusion) framework. Finally, we discuss the main challenges of LLM4AD, including latency, deployment, security and privacy, safety, trust and transparency, and personalization.