A Novel Approach to Grasping Control of Soft Robotic Grippers based on Digital Twin
作者: Tianyi Xiang, Borui Li, Quan Zhang, Mark Leach, Eng Gee Lim
分类: cs.RO, eess.SY
发布日期: 2024-10-19
期刊: 29th International Conference on Automation and Computing (ICAC 2024)
💡 一句话要点
提出基于数字孪生的软体机器人夹爪实时运动与姿态控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 数字孪生 计算机视觉 运动学建模 实时控制
📋 核心要点
- 现有软体机器人夹爪控制方法难以实现精确的实时运动和姿态控制,限制了其在工业领域的应用。
- 论文提出基于数字孪生的控制框架,利用计算机视觉和运动学建模,实现驱动压力与夹爪状态的实时映射。
- 实验结果表明,该方法在软夹爪操作的实时控制中表现良好,满足了工业应用的需求。
📝 摘要(中文)
本文提出了一种用于软体机器人夹爪实时运动和姿态控制的数字孪生(DT)框架。所开发的DT基于工业机器人工作站,集成了我们新提出的软夹爪控制方法,该方法主要基于计算机视觉,用于实时设置驱动压力以达到所需的夹爪状态。通过了解夹爪的运动,夹爪参数(例如曲率和弯曲角度等)通过Unity 3D中的运动学建模进行仿真,该建模基于四段分段常曲率运动学。驱动压力和夹爪参数之间的映射是通过实现基于OpenCV的图像处理算法和数据拟合来实现的。结果表明,我们基于DT的方法可以在软夹爪操作的实时控制中实现令人满意的性能,可以满足广泛的工业应用。
🔬 方法详解
问题定义:现有软体机器人夹爪的控制通常依赖于复杂的物理模型或大量的实验数据,难以实现精确的实时控制,尤其是在复杂或动态环境中。现有的方法在驱动压力和夹爪状态之间建立准确的映射关系方面存在挑战,限制了其在工业自动化中的应用。
核心思路:本文的核心思路是构建一个软体机器人夹爪的数字孪生模型,该模型能够实时反映真实夹爪的状态,并通过计算机视觉技术获取夹爪的运动信息。通过建立驱动压力与夹爪参数之间的映射关系,实现对真实夹爪的精确控制。数字孪生允许在虚拟环境中进行控制策略的优化和验证,从而降低实际操作的风险和成本。
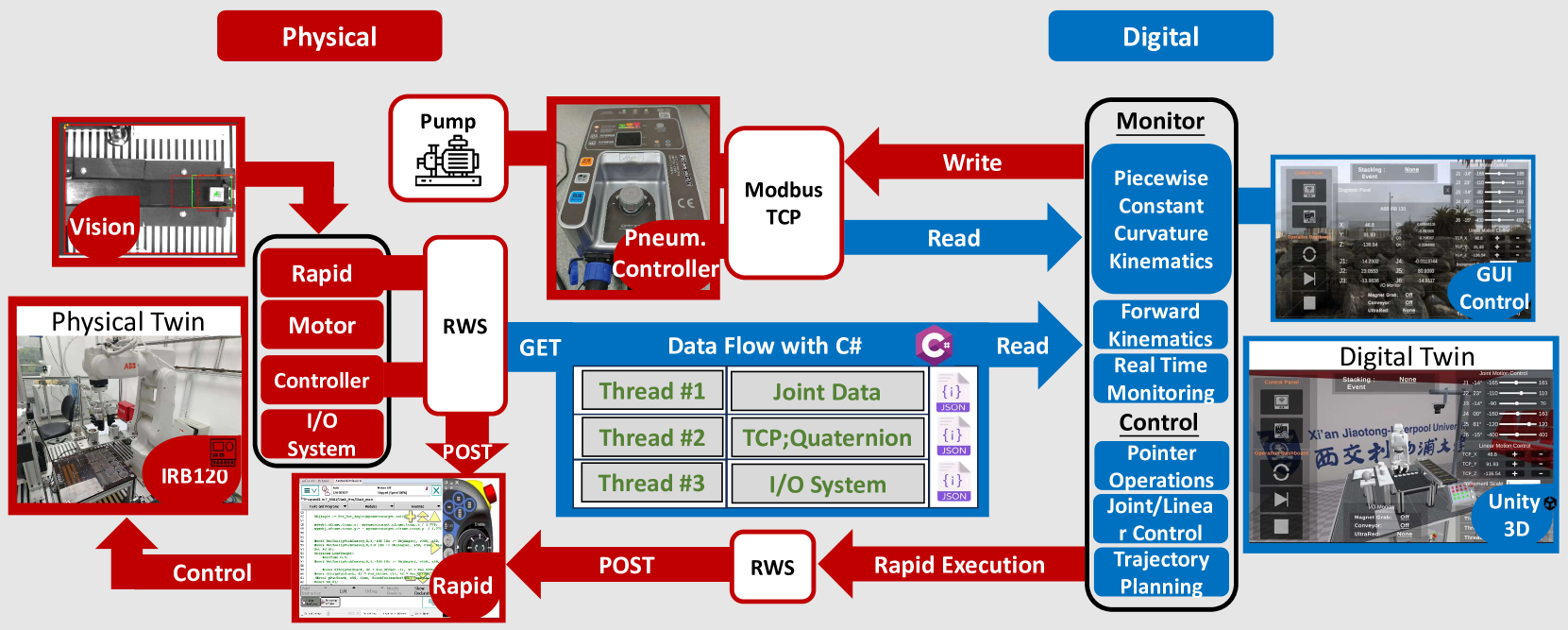
技术框架:该数字孪生框架主要包含以下几个模块:1) 工业机器人工作站:提供真实的机器人操作环境。2) 软体机器人夹爪:作为被控制的对象。3) 计算机视觉模块:使用OpenCV进行图像处理,提取夹爪的运动信息。4) 运动学建模模块:在Unity 3D中基于四段分段常曲率运动学对夹爪参数进行仿真。5) 数据拟合模块:建立驱动压力与夹爪参数之间的映射关系。整体流程是:通过计算机视觉获取夹爪的运动信息,利用运动学模型进行仿真,然后通过数据拟合建立驱动压力与夹爪参数的映射关系,最后通过控制驱动压力实现对夹爪的实时控制。
关键创新:该方法的主要创新在于将数字孪生技术应用于软体机器人夹爪的控制,并结合计算机视觉和运动学建模,实现了驱动压力与夹爪状态的实时映射。与传统的控制方法相比,该方法无需复杂的物理模型或大量的实验数据,能够更快速、更精确地实现对软体机器人夹爪的控制。
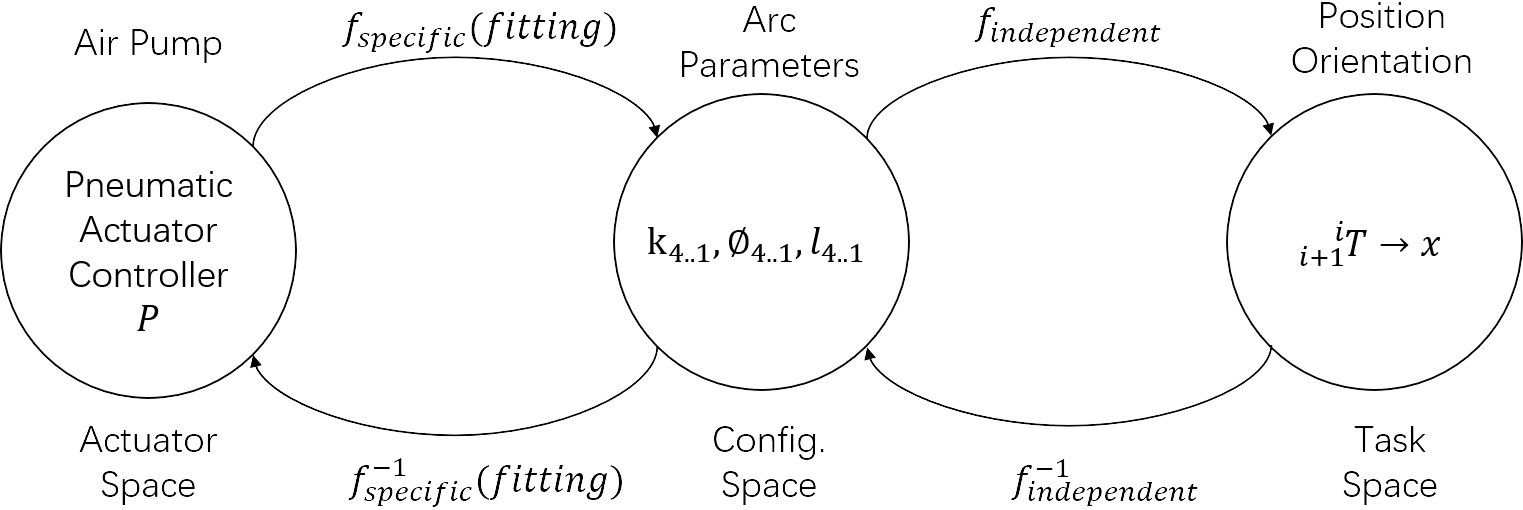
关键设计:该方法采用四段分段常曲率运动学模型来描述软体机器人夹爪的运动,并通过OpenCV提取夹爪的曲率和弯曲角度等参数。驱动压力与夹爪参数之间的映射关系通过数据拟合来实现,具体的数据拟合方法未知。在Unity 3D中构建虚拟环境,并对夹爪的运动进行仿真。
🖼️ 关键图片
📊 实验亮点
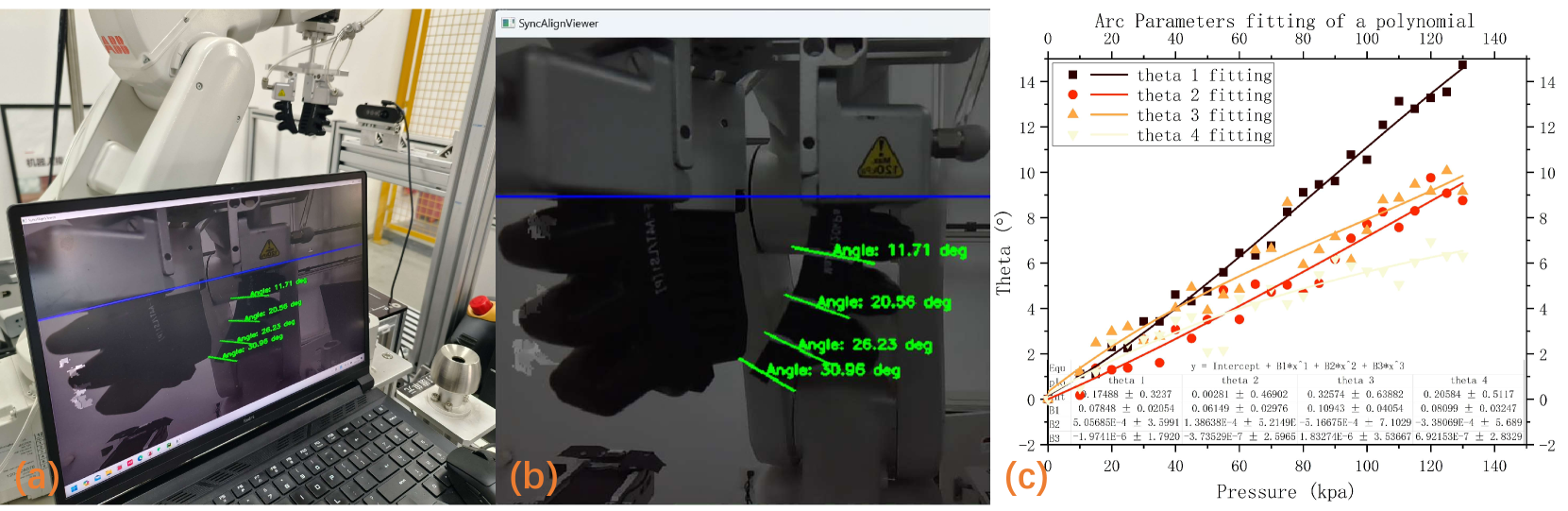
论文通过实验验证了所提出的基于数字孪生的软体机器人夹爪控制方法的有效性。实验结果表明,该方法能够实现对夹爪的实时运动和姿态控制,并满足工业应用的需求。虽然论文中没有给出具体的性能数据和对比基线,但强调了该方法在实时控制方面的优势。
🎯 应用场景
该研究成果可应用于各种工业自动化场景,例如精密装配、柔性抓取、食品加工和医疗康复等。通过数字孪生技术,可以实现对软体机器人夹爪的精确控制,提高生产效率和产品质量。此外,该方法还可以用于远程操作和危险环境下的作业,降低人员风险。未来,该技术有望在智能制造和人机协作等领域发挥重要作用。
📄 摘要(原文)
This paper has proposed a Digital Twin (DT) framework for real-time motion and pose control of soft robotic grippers. The developed DT is based on an industrial robot workstation, integrated with our newly proposed approach for soft gripper control, primarily based on computer vision, for setting the driving pressure for desired gripper status in real-time. Knowing the gripper motion, the gripper parameters (e.g. curvatures and bending angles, etc.) are simulated by kinematics modelling in Unity 3D, which is based on four-piecewise constant curvature kinematics. The mapping in between the driving pressure and gripper parameters is achieved by implementing OpenCV based image processing algorithms and data fitting. Results show that our DT-based approach can achieve satisfactory performance in real-time control of soft gripper manipulation, which can satisfy a wide range of industrial applications.