IntelliMove: Enhancing Robotic Planning with Semantic Mapping
作者: Fama Ngom, Huaxi Zhang, Lei Zhang, Karen Godary-Dejean, Marianne Huchard
分类: cs.RO
发布日期: 2024-10-18
💡 一句话要点
IntelliMove:提出基于语义地图的机器人规划框架,提升导航效率与语义任务能力
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 语义导航 机器人规划 语义地图 拓扑地图 分层地图
📋 核心要点
- 现有机器人导航方法在理解环境语义信息方面存在不足,限制了其在复杂环境中的应用。
- IntelliMove提出了一种分层语义拓扑度量地图框架IntelliMap,并结合语义规划,提升机器人对环境的理解和规划能力。
- 实验结果表明,IntelliMove在语义导航方面表现出良好的适应性和有效性,验证了其在模拟环境中的能力。
📝 摘要(中文)
语义导航使机器人能够超越基本的几何信息来理解环境,从而能够推理物体、其功能以及它们之间的相互关系。在语义机器人导航中,创建准确且语义丰富的地图至关重要。基于语义地图的规划不仅提高了机器人的规划效率和计算速度,而且使规划更具意义,支持更广泛的语义任务。本文介绍了IntelliMove的两个核心模块:IntelliMap,这是一个通用的分层语义拓扑度量地图框架,通过分析当前技术的优势和劣势而开发;以及语义规划,它利用来自IntelliMap的语义地图。我们展示了用例,突出了IntelliMove的适应性和有效性。通过在模拟环境中进行的实验,我们进一步证明了IntelliMove在语义导航方面的能力。
🔬 方法详解
问题定义:现有的机器人导航方法通常依赖于几何地图,缺乏对环境语义信息的理解,导致在复杂环境中难以进行有效的规划和导航。这些方法无法推理物体之间的关系,限制了机器人执行更高级的语义任务的能力。因此,如何构建包含丰富语义信息的地图,并在此基础上进行高效的语义规划,是当前机器人导航领域面临的重要挑战。
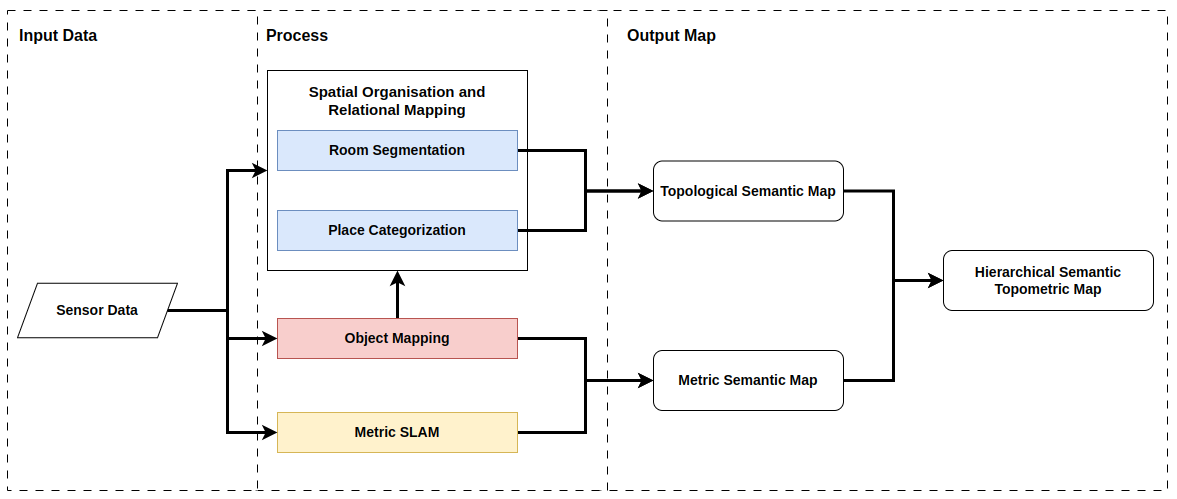
核心思路:IntelliMove的核心思路是构建一个分层的语义拓扑度量地图(IntelliMap),该地图不仅包含环境的几何信息,还包含物体、功能和关系等语义信息。然后,利用这些语义信息进行规划,从而提高机器人的规划效率和计算速度,并支持更广泛的语义任务。这种方法旨在弥合几何地图和语义理解之间的差距,使机器人能够更好地理解和利用环境信息。
技术框架:IntelliMove包含两个主要模块:IntelliMap和语义规划。IntelliMap负责构建分层语义拓扑度量地图,该地图包含多个层次,从底层的几何信息到顶层的语义信息。语义规划模块利用IntelliMap提供的语义信息进行规划,生成满足特定语义任务的路径。整个流程包括环境感知、地图构建、语义信息提取、地图更新和路径规划等步骤。
关键创新:IntelliMove的关键创新在于其分层语义拓扑度量地图框架IntelliMap。与传统的几何地图相比,IntelliMap能够表示更丰富的环境信息,包括物体、功能和关系等语义信息。此外,IntelliMap采用分层结构,可以根据不同的任务需求选择合适的地图层级,从而提高规划效率。
关键设计:IntelliMap的具体实现细节未知,论文中没有详细描述其数据结构、语义信息提取方法和地图更新策略。语义规划模块的具体算法也未知,论文中没有提及所使用的规划算法和优化目标。
🖼️ 关键图片


📊 实验亮点
论文通过在模拟环境中进行实验,验证了IntelliMove在语义导航方面的能力。具体性能数据和对比基线未知,但实验结果表明IntelliMove具有良好的适应性和有效性,能够支持更广泛的语义任务。这些实验结果为IntelliMove的实际应用奠定了基础。
🎯 应用场景
IntelliMove具有广泛的应用前景,可应用于家庭服务机器人、仓储物流机器人、医疗机器人等领域。通过理解环境的语义信息,机器人可以更好地完成诸如物品定位、目标导航、环境监控等任务。未来,IntelliMove有望推动机器人技术在复杂环境中的应用,提高机器人的智能化水平和服务能力。
📄 摘要(原文)
Semantic navigation enables robots to understand their environments beyond basic geometry, allowing them to reason about objects, their functions, and their interrelationships. In semantic robotic navigation, creating accurate and semantically enriched maps is fundamental. Planning based on semantic maps not only enhances the robot's planning efficiency and computational speed but also makes the planning more meaningful, supporting a broader range of semantic tasks. In this paper, we introduce two core modules of IntelliMove: IntelliMap, a generic hierarchical semantic topometric map framework developed through an analysis of current technologies strengths and weaknesses, and Semantic Planning, which utilizes the semantic maps from IntelliMap. We showcase use cases that highlight IntelliMove's adaptability and effectiveness. Through experiments in simulated environments, we further demonstrate IntelliMove's capability in semantic navigation.