Sim2real Cattle Joint Estimation in 3D point clouds
作者: Mohammad Okour, Raphael Falque, Alen Alempijevic
分类: cs.RO
发布日期: 2024-10-18 (更新: 2024-11-27)
期刊: IEEE/RSJ International Conference on Intelligent Robots and Systems 2024
💡 一句话要点
提出基于曲率和测地距离的牛体三维点云关节估计方法,缩小Sim2Real差距。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 三维姿态估计 牛体建模 Sim2Real 测地距离 深度学习
📋 核心要点
- 现有牛体姿态估计方法缺乏足够的三维标注数据,限制了模型的泛化能力和准确性。
- 利用动画3D模型生成大量带标注的合成数据,并通过形状增强缩小与真实数据的差距,实现Sim2Real迁移。
- 实验表明,该方法在真实牛体数据上能够准确估计关节位置,并可用于预测髋部高度等重要指标。
📝 摘要(中文)
本研究致力于解决牛体三维姿态估计中数据集匮乏的难题。通过数字艺术家构建的动画3D模型,并对模型形状进行增强以涵盖不同体型,从而缩小虚拟数据与真实数据之间的“Sim2Real”差距。利用这些带标注的模型,训练深度学习框架,仅基于外部表面曲率估计内部关节。该方法结合表面流形上的测地距离和多边定位,在语义关键点检测的编码器-解码器架构中提取关节。通过比较真实环境中牛群移动和行走时的连杆长度,验证了关节提取的鲁棒性。此外,受哺乳动物骨骼长度与身高的相关性启发,利用估计的关节预测真实牛体数据集中的髋部高度,为改进牛体监测实践提供见解。
🔬 方法详解
问题定义:现有牛体姿态估计方法面临的主要问题是缺乏大规模、高质量的三维标注数据集。真实数据的获取成本高昂,且标注过程复杂。因此,模型难以在真实场景中泛化,姿态估计的准确性受到限制。
核心思路:论文的核心思路是利用合成数据弥补真实数据的不足。通过构建一个可变形的牛体3D模型,并生成大量带有精确关节位置标注的合成数据。为了减小合成数据与真实数据之间的差异(Sim2Real gap),对3D模型的形状进行增强,使其能够覆盖不同体型的牛。
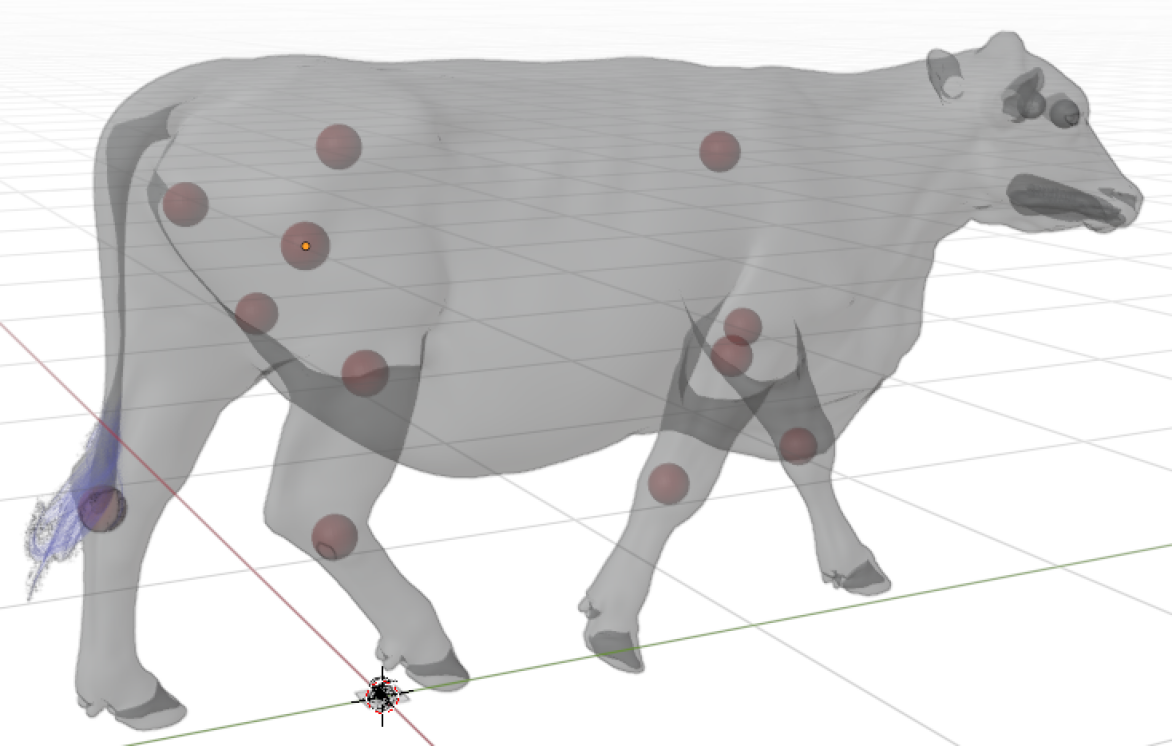
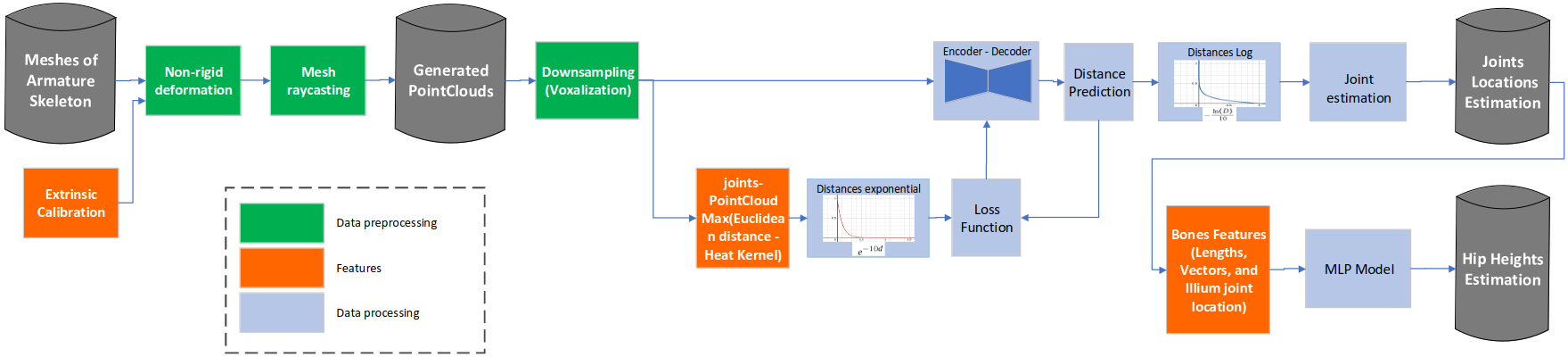
技术框架:该方法采用一个编码器-解码器架构的深度学习框架。编码器负责从牛体表面的点云数据中提取特征,解码器则基于这些特征预测关节位置。关键在于利用表面曲率信息作为输入,并结合测地距离进行关节定位。整体流程包括:1) 3D模型生成与形状增强;2) 合成数据渲染与标注;3) 网络训练;4) 真实数据上的关节估计与验证。
关键创新:该方法最重要的创新点在于利用测地距离进行关节定位。传统的欧氏距离在处理非凸物体时可能不准确,而测地距离能够沿着物体表面计算距离,更符合牛体结构的特点。此外,结合表面曲率信息,能够更好地定位关节位置。
关键设计:网络结构采用语义关键点检测的编码器-解码器架构。损失函数可能包含关键点位置的回归损失,以及用于约束关节连杆长度的正则化项。形状增强策略可能包括对3D模型的缩放、扭曲等操作,以增加数据的多样性。测地距离的计算可能采用快速近似算法,以提高计算效率。
🖼️ 关键图片

📊 实验亮点
该研究通过合成数据训练的模型,在真实牛体数据上实现了较为准确的关节估计。通过比较真实环境中牛群移动和行走时的连杆长度,验证了关节提取的鲁棒性。此外,利用估计的关节预测真实牛体数据集中的髋部高度,并取得了较好的结果,证明了该方法在实际应用中的潜力。
🎯 应用场景
该研究成果可应用于精准畜牧业,实现对牛群健康状况的自动化监测。通过分析牛体的姿态和关节活动情况,可以早期发现潜在的疾病或受伤,从而及时采取干预措施,提高养殖效益。此外,该技术还可以用于牛体生长发育的评估,为饲养管理提供科学依据。
📄 摘要(原文)
Understanding the well-being of cattle is crucial in various agricultural contexts. Cattle's body shape and joint articulation carry significant information about their welfare, yet acquiring comprehensive datasets for 3D body pose estimation presents a formidable challenge. This study delves into the construction of such a dataset specifically tailored for cattle. Leveraging the expertise of digital artists, we use a single animated 3D model to represent diverse cattle postures. To address the disparity between virtual and real-world data, we augment the 3D model's shape to encompass a range of potential body appearances, thereby narrowing the "sim2real" gap. We use these annotated models to train a deep-learning framework capable of estimating internal joints solely based on external surface curvature. Our contribution is specifically the use of geodesic distance over the surface manifold, coupled with multilateration to extract joints in a semantic keypoint detection encoder-decoder architecture. We demonstrate the robustness of joint extraction by comparing the link lengths extracted on real cattle mobbing and walking within a race. Furthermore, inspired by the established allometric relationship between bone length and the overall height of mammals, we utilise the estimated joints to predict hip height within a real cattle dataset, extending the utility of our approach to offer insights into improving cattle monitoring practices.