3D Gaussian Splatting in Robotics: A Survey
作者: Siting Zhu, Guangming Wang, Xin Kong, Dezhi Kong, Hesheng Wang
分类: cs.RO
发布日期: 2024-10-16 (更新: 2024-12-19)
💡 一句话要点
综述:3D高斯溅射在机器人领域的应用与进展
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 3D高斯溅射 机器人 神经辐射场 场景理解 实时渲染
📋 核心要点
- 传统NeRF方法在机器人应用中存在渲染速度慢、难以实时交互的问题,限制了其在动态环境下的应用。
- 3DGS通过显式地使用3D高斯基元表示场景,并结合可微渲染,实现了实时渲染和高质量的图像生成。
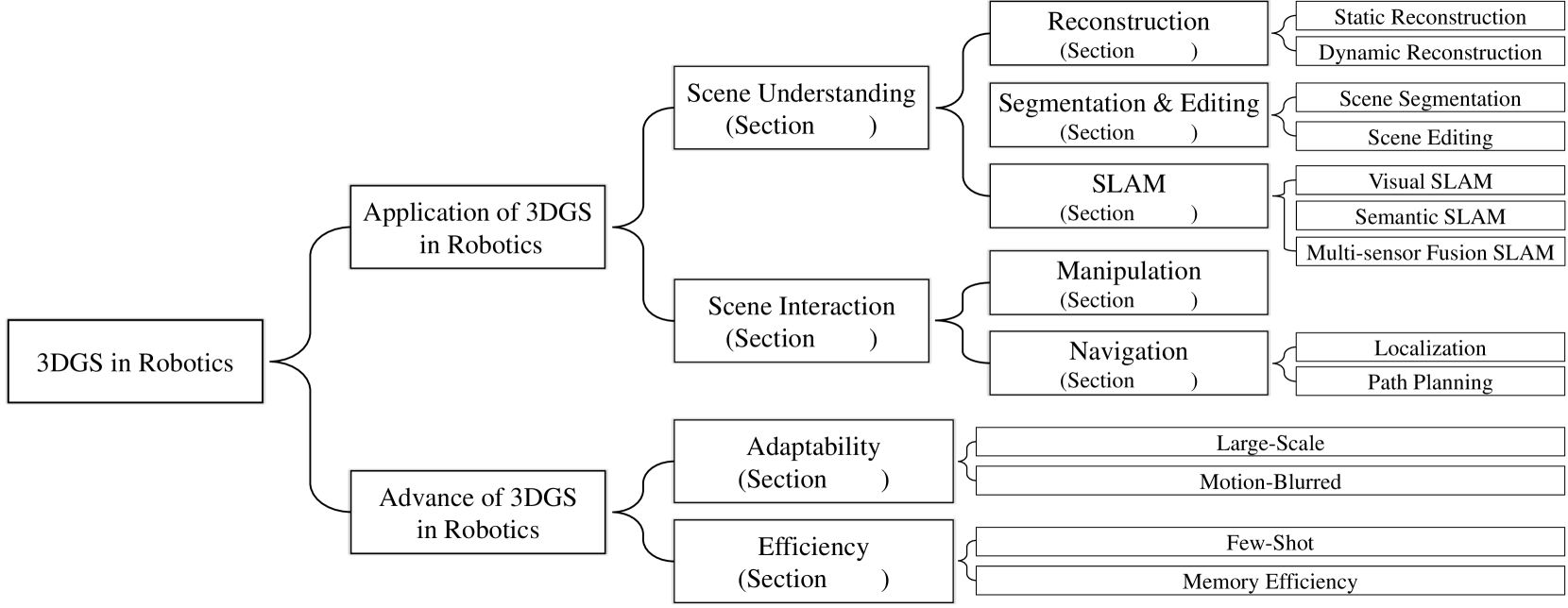
- 该综述全面分析了3DGS在机器人领域的应用,包括场景理解、交互以及3DGS技术本身的改进,并展望了未来发展方向。
📝 摘要(中文)
环境的稠密3D表示一直是机器人领域的一个长期目标。虽然先前的神经辐射场(NeRF)表示因其隐式、基于坐标的模型而流行,但最近出现的3D高斯溅射(3DGS)已证明其在显式辐射场表示方面具有显著潜力。通过利用3D高斯基元进行显式场景表示并实现可微渲染,3DGS在实时渲染和照片级真实感性能方面表现出优于其他辐射场的显著优势,这有利于机器人应用。在本综述中,我们提供了对机器人领域中3DGS的全面理解。我们将相关工作的讨论分为两个主要类别:3DGS的应用和3DGS技术的进步。在应用部分,我们探讨了3DGS如何在场景理解和交互等各种机器人任务中得到利用。3DGS进展部分侧重于3DGS自身属性在适应性和效率方面的改进,旨在提高其在机器人技术中的性能。然后,我们总结了机器人技术中最常用的数据集和评估指标。最后,我们确定了当前3DGS方法的挑战和局限性,并讨论了3DGS在机器人技术中的未来发展。
🔬 方法详解
问题定义:论文旨在解决机器人领域中环境的稠密3D表示问题。现有的NeRF方法虽然能够生成高质量的图像,但渲染速度较慢,难以满足机器人实时交互的需求。此外,NeRF的隐式表示方式也限制了其在机器人操作和规划等任务中的应用。
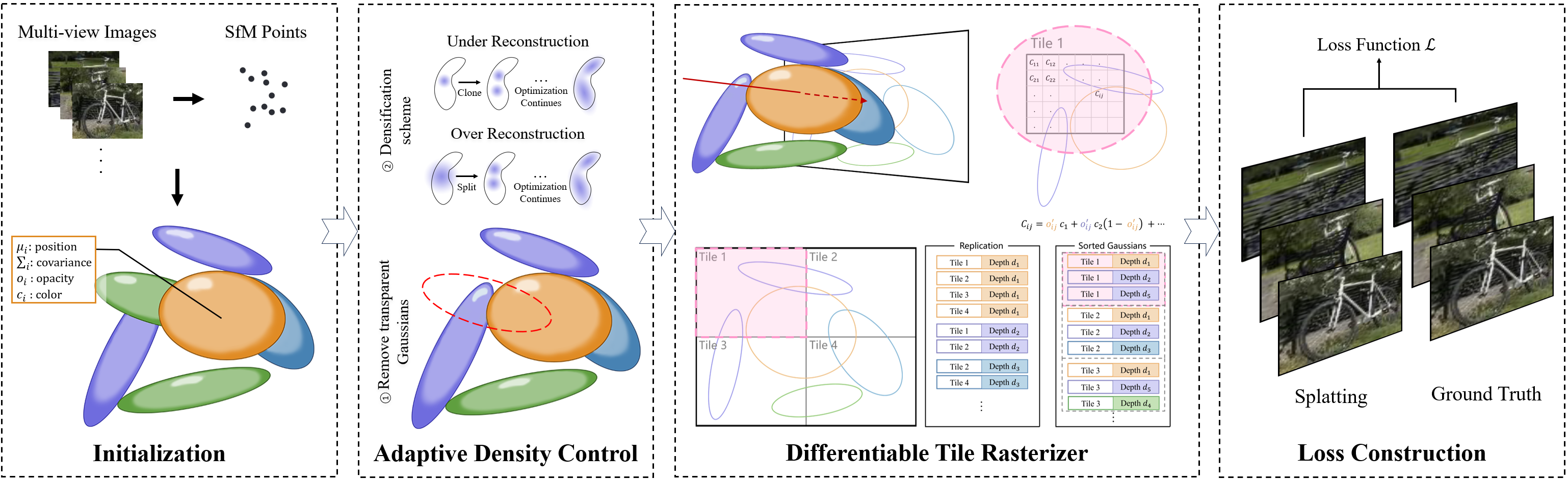
核心思路:论文的核心思路是利用3D高斯溅射(3DGS)作为环境的显式表示。3DGS使用3D高斯基元来表示场景,每个高斯基元包含位置、协方差、颜色等属性。通过可微渲染,可以高效地将这些高斯基元投影到图像平面上,从而实现快速渲染。
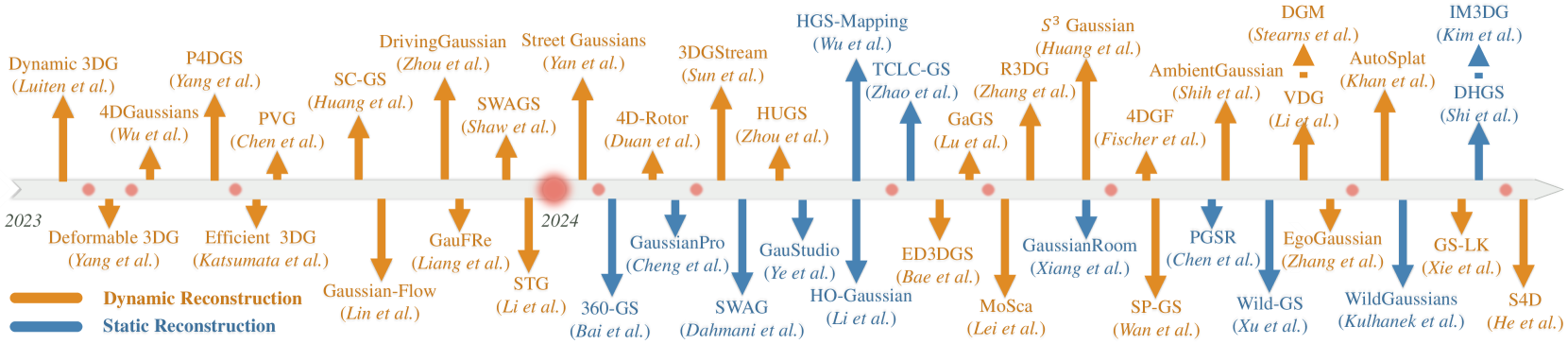
技术框架:该综述将3DGS在机器人领域的研究分为两个主要类别:3DGS的应用和3DGS技术的改进。在应用方面,综述探讨了3DGS在场景理解、交互等机器人任务中的应用。在技术改进方面,综述关注了3DGS在适应性和效率方面的提升,例如如何处理动态场景、如何减少计算量等。
关键创新:3DGS的关键创新在于其显式的场景表示方式。与NeRF的隐式表示相比,3DGS可以直接操作和修改场景中的3D高斯基元,从而更容易实现机器人与环境的交互。此外,3DGS的可微渲染 pipeline 实现了高效的渲染速度,使其能够满足机器人实时应用的需求。
关键设计:3DGS的关键设计包括:1) 使用3D高斯基元作为场景的显式表示;2) 设计可微渲染 pipeline,实现高效的图像生成;3) 使用梯度下降优化高斯基元的属性,从而拟合场景的几何和外观信息。具体的损失函数通常包括图像重建损失和正则化项,以保证高斯基元的形状和分布。
🖼️ 关键图片
📊 实验亮点
该综述总结了3DGS在机器人领域的最新进展,并指出了当前方法的局限性和未来发展方向。例如,如何处理大规模场景、如何提高3DGS的鲁棒性、如何将3DGS与其他传感器数据融合等。这些问题是未来3DGS在机器人领域应用的关键挑战。
🎯 应用场景
3DGS在机器人领域具有广泛的应用前景,包括:1) 机器人导航和定位:利用3DGS构建地图,实现机器人在未知环境中的自主导航;2) 机器人操作:通过3DGS进行场景理解和物体识别,辅助机器人完成抓取、装配等任务;3) 人机交互:利用3DGS生成逼真的虚拟环境,实现人与机器人的自然交互。未来,3DGS有望成为机器人感知和交互的重要组成部分。
📄 摘要(原文)
Dense 3D representations of the environment have been a long-term goal in the robotics field. While previous Neural Radiance Fields (NeRF) representation have been prevalent for its implicit, coordinate-based model, the recent emergence of 3D Gaussian Splatting (3DGS) has demonstrated remarkable potential in its explicit radiance field representation. By leveraging 3D Gaussian primitives for explicit scene representation and enabling differentiable rendering, 3DGS has shown significant advantages over other radiance fields in real-time rendering and photo-realistic performance, which is beneficial for robotic applications. In this survey, we provide a comprehensive understanding of 3DGS in the field of robotics. We divide our discussion of the related works into two main categories: the application of 3DGS and the advancements in 3DGS techniques. In the application section, we explore how 3DGS has been utilized in various robotics tasks from scene understanding and interaction perspectives. The advance of 3DGS section focuses on the improvements of 3DGS own properties in its adaptability and efficiency, aiming to enhance its performance in robotics. We then summarize the most commonly used datasets and evaluation metrics in robotics. Finally, we identify the challenges and limitations of current 3DGS methods and discuss the future development of 3DGS in robotics.