Towards Local Minima-free Robotic Navigation: Model Predictive Path Integral Control via Repulsive Potential Augmentation
作者: Takahiro Fuke, Masafumi Endo, Kohei Honda, Genya Ishigami
分类: cs.RO
发布日期: 2024-10-15 (更新: 2024-11-09)
备注: 7pages, 8 figures, Accepted for IEEE/SICE International Symposium on System Integration, 2025
💡 一句话要点
提出基于斥力势场增强的MPPI控制,解决机器人导航局部极小值问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人导航 模型预测控制 路径积分控制 局部极小值 斥力势场 运动规划 自主导航
📋 核心要点
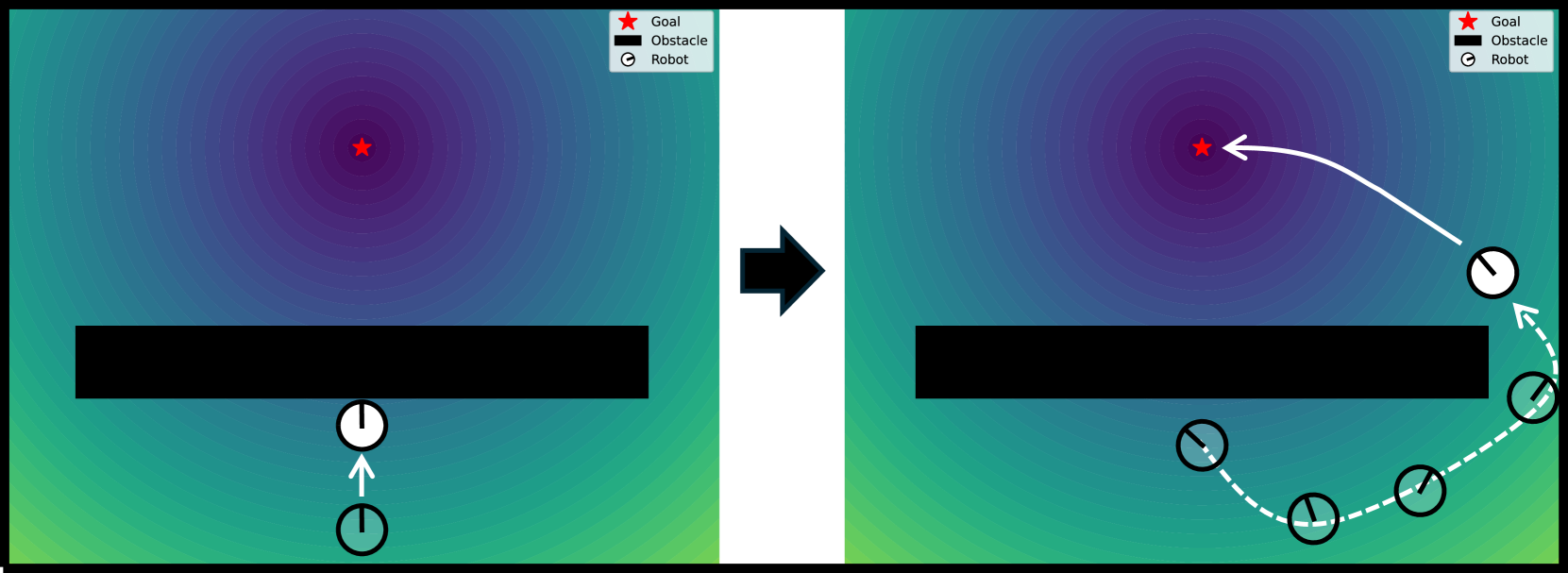
- 基于模型的机器人导航易陷入局部极小值,现有方法在全局最优性和计算效率上存在不足。
- 提出斥力势场增强的MPPI控制,将高层方向信息融入控制过程,主动避开局部极小值。
- 理论分析和仿真结果表明,该方法能有效避免局部极小值,并在全局最优性上优于现有方法。
📝 摘要(中文)
基于模型的控制是机器人导航的关键组成部分,但由于其固有的有限性和短视性优化过程,常常陷入局部极小值。以往的研究虽然解决了这个问题,但要么牺牲了解决方案的质量(由于其反应性),要么降低了生成主动引导的显式路径的计算效率。为此,我们提出了一种运动规划方法,该方法主动避免局部极小值,而无需全局路径的任何指导。关键思想是斥力势场增强,通过人工势场将高层方向信息作为单个斥力项集成到模型预测路径积分控制中。我们通过理论分析和在具有诱导局部极小值的障碍物的环境中进行仿真来评估我们的方法。结果表明,我们的方法保证了局部极小值的避免,并且在全局最优性方面优于现有方法,而不会降低计算效率。
🔬 方法详解
问题定义:论文旨在解决机器人导航中,基于模型的控制方法容易陷入局部极小值的问题。现有方法要么是反应式的,缺乏全局规划能力,导致解的质量不高;要么是计算复杂度高,难以实时应用。因此,如何在保证计算效率的前提下,使机器人能够主动避开局部极小值,是本文要解决的核心问题。
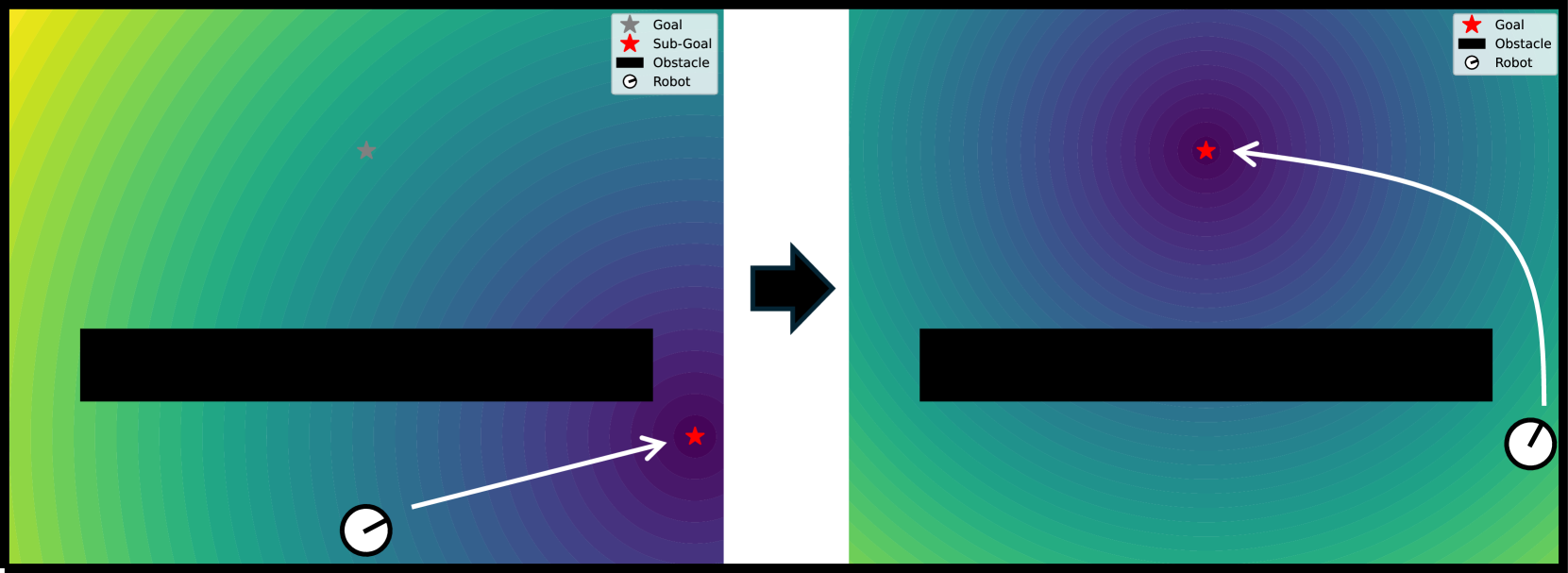
核心思路:论文的核心思路是通过引入斥力势场来增强模型预测路径积分(MPPI)控制。具体来说,就是利用人工势场生成斥力,引导机器人远离潜在的局部极小值区域。这种方法的核心在于将高层方向信息融入到低层的控制过程中,从而使机器人具有“预见性”,能够主动避开陷阱。
技术框架:整体框架是在MPPI控制的基础上,增加了一个斥力势场模块。该模块根据环境信息(例如障碍物的位置)生成斥力势场,并将该势场转化为一个斥力项,添加到MPPI控制的成本函数中。MPPI控制器根据修改后的成本函数进行优化,从而生成避开局部极小值的控制指令。整个流程可以概括为:环境感知 -> 斥力势场生成 -> 成本函数修改 -> MPPI控制 -> 机器人运动。
关键创新:最重要的技术创新点在于斥力势场的引入和集成方式。与传统的基于全局路径规划的方法不同,该方法不需要预先生成全局路径,而是通过局部的斥力势场来引导机器人。此外,将斥力势场作为单个斥力项集成到MPPI控制的成本函数中,使得该方法能够高效地进行优化,避免了计算复杂度过高的问题。
关键设计:斥力势场的具体形式是一个关键设计。论文中可能采用了高斯势场或其他形式的势场,其参数(例如势场的强度和影响范围)需要根据具体的环境和机器人动力学进行调整。此外,如何将斥力项与MPPI控制的成本函数进行平衡,也是一个重要的设计考虑。如果斥力项过强,可能会导致机器人过于保守,无法到达目标点;如果斥力项过弱,则可能无法有效地避免局部极小值。
🖼️ 关键图片

📊 实验亮点
论文通过仿真实验验证了所提出方法的有效性。实验结果表明,该方法能够有效地避免局部极小值,并且在全局最优性方面优于现有的方法。具体来说,与传统的MPPI控制相比,该方法能够显著提高机器人到达目标点的成功率,并减少所需的步数。此外,该方法在计算效率方面也具有优势,能够满足实时控制的需求。
🎯 应用场景
该研究成果可应用于各种需要自主导航的机器人系统,例如:服务机器人、仓储机器人、无人驾驶车辆等。通过避免局部极小值,可以提高机器人的导航效率和可靠性,使其能够在复杂的环境中安全、高效地完成任务。此外,该方法还可以扩展到其他控制领域,例如:无人机控制、水下机器人控制等。
📄 摘要(原文)
Model-based control is a crucial component of robotic navigation. However, it often struggles with entrapment in local minima due to its inherent nature as a finite, myopic optimization procedure. Previous studies have addressed this issue but sacrificed either solution quality due to their reactive nature or computational efficiency in generating explicit paths for proactive guidance. To this end, we propose a motion planning method that proactively avoids local minima without any guidance from global paths. The key idea is repulsive potential augmentation, integrating high-level directional information into the Model Predictive Path Integral control as a single repulsive term through an artificial potential field. We evaluate our method through theoretical analysis and simulations in environments with obstacles that induce local minima. Results show that our method guarantees the avoidance of local minima and outperforms existing methods in terms of global optimality without decreasing computational efficiency.