Conformalized Reachable Sets for Obstacle Avoidance With Spheres
作者: Yongseok Kwon, Jonathan Michaux, Seth Isaacson, Bohao Zhang, Matthew Ejakov, Katherine A. Skinner, Ram Vasudevan
分类: cs.RO
发布日期: 2024-10-13
备注: https://roahmlab.github.io/crows/
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
提出基于保形可达集的球体障碍物规避方法CROWS,实现概率安全的实时轨迹规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 可达集 保形预测 轨迹优化 碰撞避免
📋 核心要点
- 现有轨迹优化方法在安全性和实时性之间进行权衡,可能增加碰撞风险,这是自主机器人在非结构化环境中部署面临的核心挑战。
- CROWS通过离线学习基于神经网络的可达集表示,并利用保形预测计算置信度边界,为机器人运动提供概率安全保证。
- 实验结果表明,CROWS在复杂环境中优于现有方法,实现了概率安全且无碰撞的实时轨迹规划。
📝 摘要(中文)
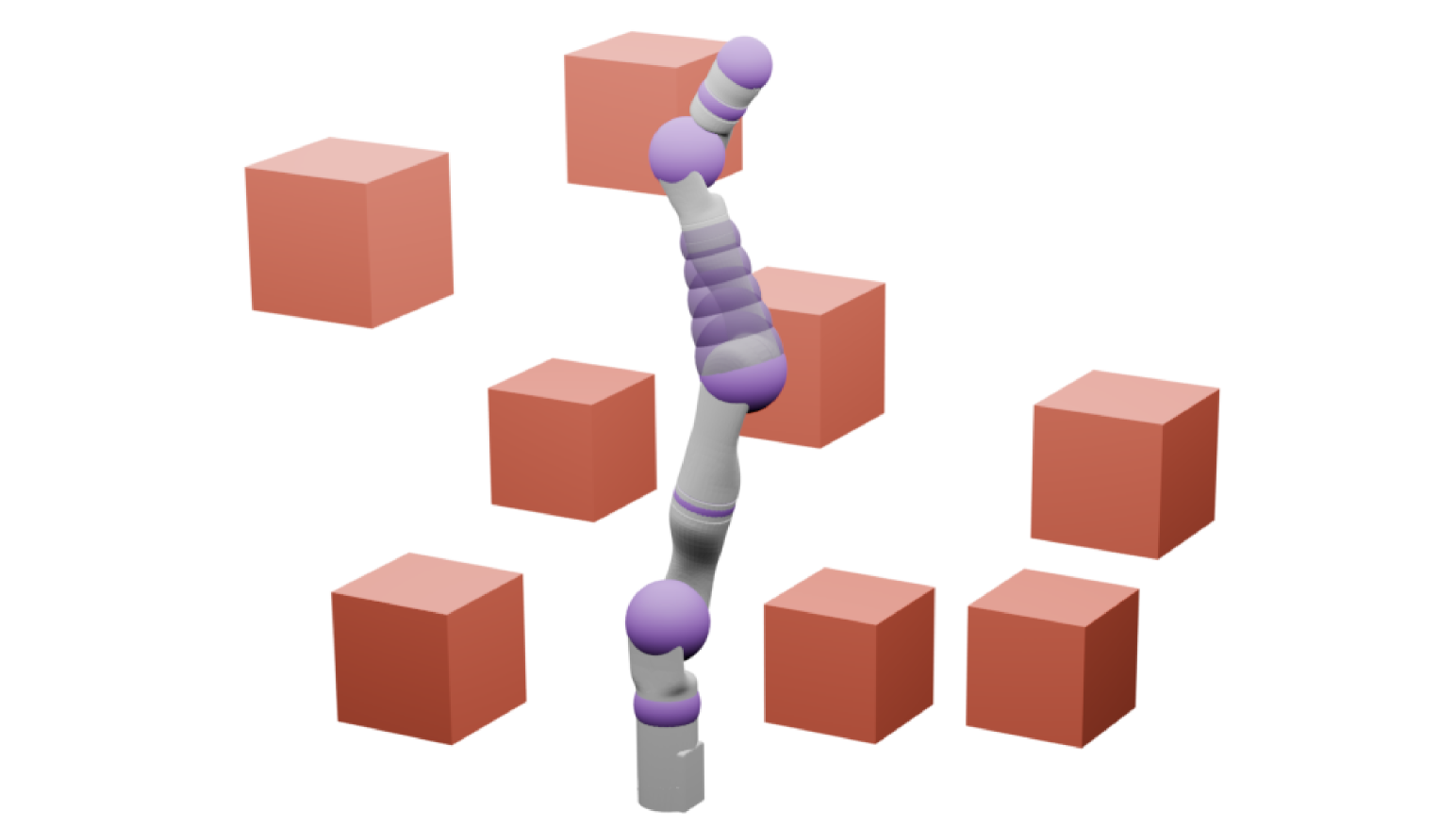
本文提出了一种名为Conformalized Reachable Sets for Obstacle Avoidance With Spheres (CROWS) 的新型实时、后退视界轨迹规划器,用于生成概率安全的运动规划。CROWS 离线学习一种基于神经网络的新型可达集表示,该可达集基于球体,过近似机器人运动的扫掠体积。然后,CROWS 使用保形预测来计算置信度边界,从而为学习到的可达集提供概率安全保证。在运行时,CROWS 执行轨迹优化,以选择一条概率保证无碰撞的轨迹。实验表明,在解决复杂环境中具有挑战性的运动规划任务时,CROWS 优于各种最先进的方法,同时保持无碰撞。
🔬 方法详解
问题定义:论文旨在解决自主机器人在复杂环境中进行安全运动规划的问题。现有轨迹优化方法通常依赖启发式策略来平衡安全性和实时性,这可能导致碰撞风险增加。因此,需要一种能够在保证安全性的前提下,实现实时轨迹规划的方法。
核心思路:论文的核心思路是利用可达集来表示机器人运动的扫掠体积,并使用保形预测来为可达集提供概率安全保证。通过离线学习可达集表示,并在运行时进行轨迹优化,可以实现概率安全且实时的运动规划。这种方法避免了传统启发式策略带来的不确定性,从而提高了安全性。
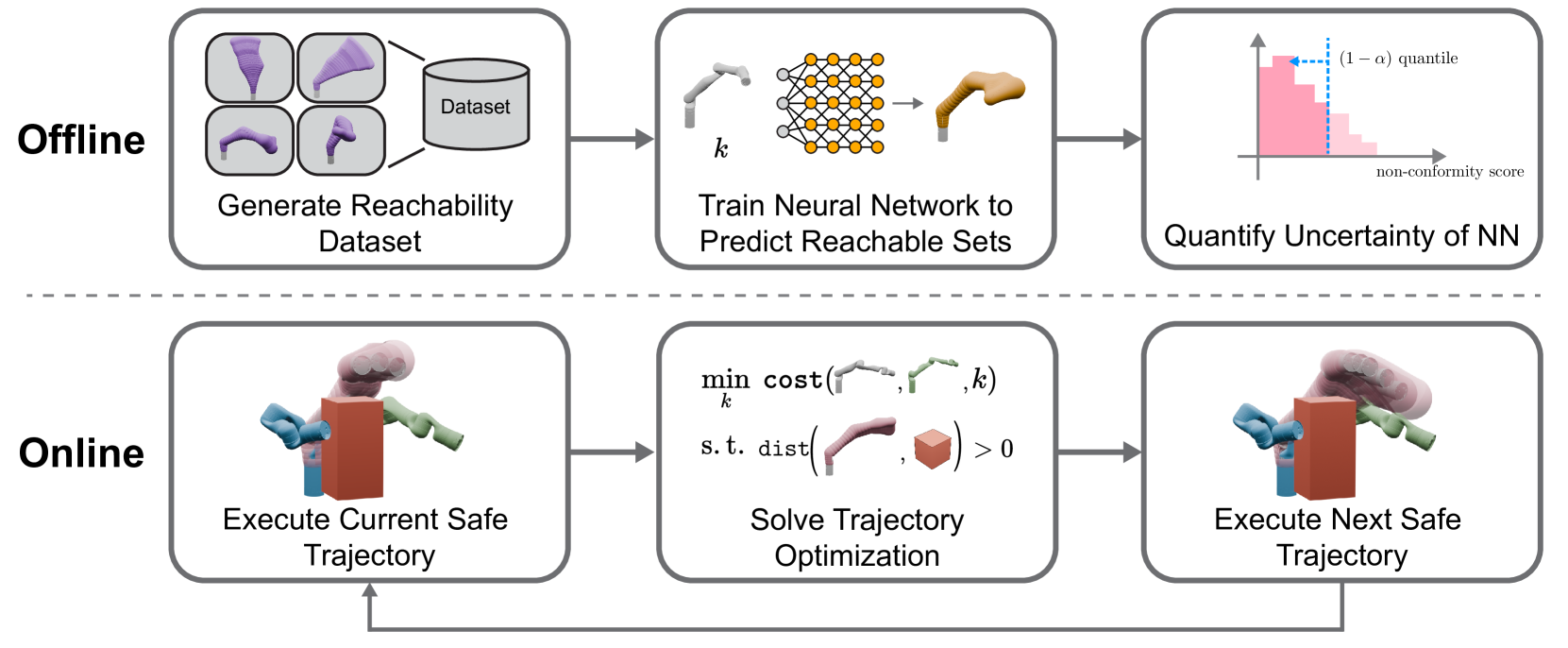
技术框架:CROWS的整体框架包括离线学习阶段和在线轨迹优化阶段。在离线学习阶段,CROWS使用神经网络学习基于球体的可达集表示。然后,使用保形预测计算置信度边界,为学习到的可达集提供概率安全保证。在在线轨迹优化阶段,CROWS使用优化算法选择一条概率保证无碰撞的轨迹。
关键创新:CROWS的关键创新在于以下几点:1) 提出了一种基于神经网络的新型可达集表示方法,能够有效地过近似机器人运动的扫掠体积。2) 使用保形预测来计算置信度边界,为可达集提供概率安全保证。3) 将离线学习和在线轨迹优化相结合,实现了概率安全且实时的运动规划。与现有方法相比,CROWS能够提供更强的安全保证,同时保持较高的实时性能。
关键设计:CROWS的关键设计包括:1) 使用球体来表示机器人的形状,简化了可达集的计算。2) 使用神经网络来学习可达集表示,提高了表示的精度和效率。3) 使用保形预测来计算置信度边界,保证了可达集的概率安全性。4) 在轨迹优化过程中,考虑了可达集的约束,确保生成的轨迹是概率安全的。
🖼️ 关键图片

📊 实验亮点
实验结果表明,CROWS在解决复杂环境中具有挑战性的运动规划任务时,优于各种最先进的方法,同时保持无碰撞。具体性能数据未知,但论文强调CROWS在安全性和实时性方面都取得了显著的提升,能够有效地解决现有方法在复杂环境中的局限性。
🎯 应用场景
CROWS可应用于各种自主机器人领域,例如自动驾驶、无人机、服务机器人等。它能够帮助机器人在复杂环境中安全地进行导航和运动规划,避免与障碍物发生碰撞。该研究的实际价值在于提高自主机器人的安全性和可靠性,促进其在现实世界中的广泛应用。未来,CROWS可以进一步扩展到更复杂的机器人系统和环境,例如多机器人协同和动态环境。
📄 摘要(原文)
Safe motion planning algorithms are necessary for deploying autonomous robots in unstructured environments. Motion plans must be safe to ensure that the robot does not harm humans or damage any nearby objects. Generating these motion plans in real-time is also important to ensure that the robot can adapt to sudden changes in its environment. Many trajectory optimization methods introduce heuristics that balance safety and real-time performance, potentially increasing the risk of the robot colliding with its environment. This paper addresses this challenge by proposing Conformalized Reachable Sets for Obstacle Avoidance With Spheres (CROWS). CROWS is a novel real-time, receding-horizon trajectory planner that generates probalistically-safe motion plans. Offline, CROWS learns a novel neural network-based representation of a spherebased reachable set that overapproximates the swept volume of the robot's motion. CROWS then uses conformal prediction to compute a confidence bound that provides a probabilistic safety guarantee on the learned reachable set. At runtime, CROWS performs trajectory optimization to select a trajectory that is probabilstically-guaranteed to be collision-free. We demonstrate that CROWS outperforms a variety of state-of-the-art methods in solving challenging motion planning tasks in cluttered environments while remaining collision-free. Code, data, and video demonstrations can be found at https://roahmlab.github.io/crows/