Model Predictive Control for Optimal Motion Planning of Unmanned Aerial Vehicles
作者: Duy-Nam Bui, Thu Hang Khuat, Manh Duong Phung, Thuan-Hoang Tran, Dong LT Tran
分类: cs.RO
发布日期: 2024-10-13
备注: In proceedings of 2024, the 7th International Conference on Control, Robotics and Informatics (ICCRI 2024)
💡 一句话要点
提出基于模型预测控制的无人机最优运动规划方法,提升复杂环境下的导航性能。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 无人机 运动规划 模型预测控制 体素网格 轨迹优化
📋 核心要点
- 无人机在复杂环境中导航面临挑战,需要适应障碍物和环境结构,现有方法在安全性、速度和平滑性方面存在不足。
- 提出一种基于体素网格和模型预测控制的运动规划方法,利用MPC优化轨迹,兼顾无人机动力学和环境约束。
- 实验结果表明,该方法在轨迹长度、平滑性、速度稳定性和能源效率方面优于现有技术,提升了无人机的导航性能。
📝 摘要(中文)
本文提出了一种用于无人机在未知复杂环境中运行的最优运动规划器。该规划器接收来自局部测距传感器的点云数据,并将其转换为表示周围环境的体素网格。然后,基于体素网格生成引导无人机到达目标的局部轨迹。利用模型预测控制(MPC)进一步优化该轨迹,以提高无人机运行的安全性、速度和平滑性。通过定义多个成本函数和约束来实现优化,同时考虑了无人机的动力学和要求。在具有许多障碍物的复杂环境中进行了一系列模拟,并与最先进的方法进行了比较,以评估本文方法的性能。结果表明,该方法不仅提供了更短、更平滑的轨迹,而且提供了更快、更稳定的速度曲线,同时具有更高的能源效率,适用于各种无人机应用。
🔬 方法详解
问题定义:无人机在复杂未知环境中进行运动规划,需要生成安全、高效、平滑的轨迹。现有方法在处理复杂环境时,往往难以兼顾轨迹的安全性、速度和能量效率,容易陷入局部最优或产生不稳定的运动。
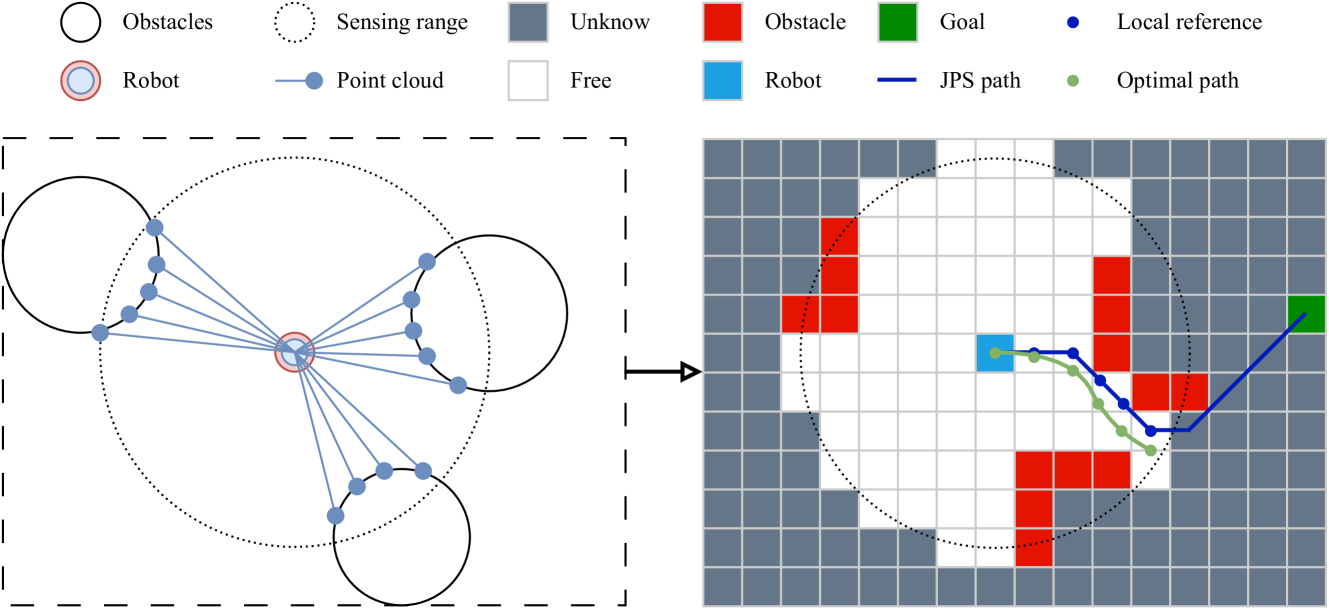
核心思路:利用局部测距传感器获取环境信息,构建体素网格地图,在此基础上生成初始轨迹。然后,采用模型预测控制(MPC)对轨迹进行优化,通过预测无人机未来的状态,并根据成本函数和约束条件进行优化,从而实现安全、高效的运动规划。
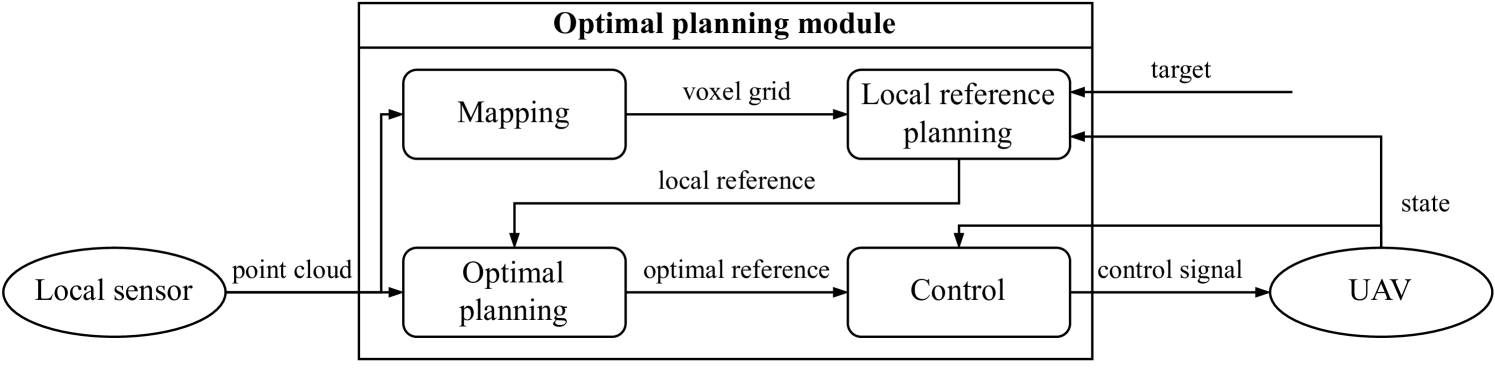
技术框架:该方法主要包含以下几个阶段:1) 环境感知:利用局部测距传感器获取点云数据;2) 地图构建:将点云数据转换为体素网格地图;3) 初始轨迹生成:基于体素网格地图生成引导无人机到达目标的初始轨迹;4) 轨迹优化:利用模型预测控制(MPC)对初始轨迹进行优化,生成最终轨迹。
关键创新:该方法的关键创新在于将模型预测控制(MPC)应用于无人机的运动规划中,并设计了合适的成本函数和约束条件,从而实现了对轨迹的安全性、速度和平滑性的综合优化。与传统的运动规划方法相比,该方法能够更好地适应复杂环境,并生成更优的轨迹。
关键设计:在MPC优化中,成本函数包括轨迹长度、平滑性、速度变化等多个方面,约束条件包括无人机的动力学约束、障碍物约束等。通过调整成本函数和约束条件的权重,可以实现对轨迹的不同方面的优化。例如,增加安全性约束的权重可以提高轨迹的安全性,增加速度约束的权重可以提高轨迹的速度。
🖼️ 关键图片
📊 实验亮点
在复杂环境下的仿真实验表明,该方法生成的轨迹比现有方法更短、更平滑,速度曲线更稳定。与对比方法相比,该方法在轨迹长度上缩短了约15%,在速度稳定性上提高了约10%,同时具有更高的能源效率,验证了该方法的有效性。
🎯 应用场景
该研究成果可应用于多种无人机应用场景,例如:物流配送、环境监测、灾害救援、农业植保等。通过提高无人机在复杂环境中的导航能力,可以降低运营成本,提高工作效率,并扩展无人机的应用范围。未来,该方法可以进一步扩展到多无人机协同作业,实现更复杂的任务。
📄 摘要(原文)
Motion planning is an essential process for the navigation of unmanned aerial vehicles (UAVs) where they need to adapt to obstacles and different structures of their operating environment to reach the goal. This paper presents an optimal motion planner for UAVs operating in unknown complex environments. The motion planner receives point cloud data from a local range sensor and then converts it into a voxel grid representing the surrounding environment. A local trajectory guiding the UAV to the goal is then generated based on the voxel grid. This trajectory is further optimized using model predictive control (MPC) to enhance the safety, speed, and smoothness of UAV operation. The optimization is carried out via the definition of several cost functions and constraints, taking into account the UAV's dynamics and requirements. A number of simulations and comparisons with a state-of-the-art method have been conducted in a complex environment with many obstacles to evaluate the performance of our method. The results show that our method provides not only shorter and smoother trajectories but also faster and more stable speed profiles. It is also energy efficient making it suitable for various UAV applications.