Flying Quadrotors in Tight Formations using Learning-based Model Predictive Control
作者: Kong Yao Chee, Pei-An Hsieh, George J. Pappas, M. Ani Hsieh
分类: cs.RO, cs.LG, eess.SY
发布日期: 2024-10-13
备注: 7 pages, 5 figures
💡 一句话要点
提出基于学习的MPC方法,解决四旋翼飞行器紧密编队飞行中的气动效应建模与控制难题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四旋翼编队飞行 模型预测控制 机器学习 气动效应建模 数据驱动控制
📋 核心要点
- 四旋翼编队飞行中,近场气动效应复杂,传统建模方法难以准确描述,数据驱动方法样本效率低且泛化性差。
- 结合第一性原理和数据驱动方法,构建轻量级气动模型,并融入非线性模型预测控制框架中。
- 实验表明,该方法在轨迹跟踪和抗干扰方面显著优于传统MPC,且样本效率高,仅需少量飞行数据。
📝 摘要(中文)
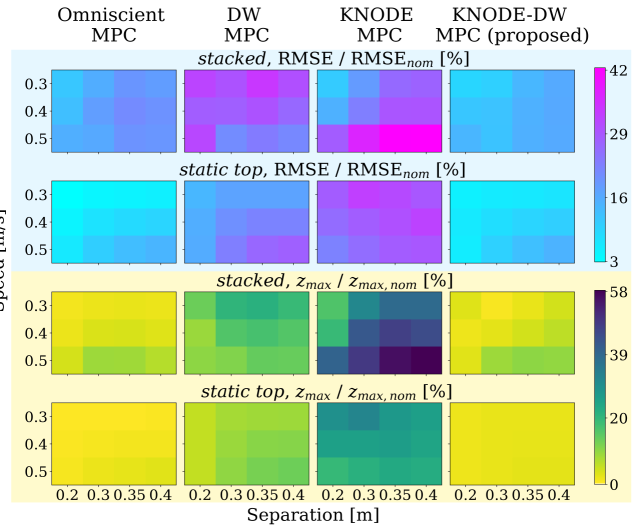
四旋翼飞行器紧密编队飞行是一个具有挑战性的问题。在四旋翼飞行器的近场气流中,螺旋桨引起的气动效应复杂且难以描述。虽然机器学习工具可能用于推导捕捉这些效应的模型,但这些数据驱动的方法可能样本效率低下,并且得到的模型通常不如基于第一性原理的模型泛化能力强。本文提出了一种框架,结合了第一性原理建模和数据驱动方法的优点,构建了一个准确且样本高效的表示,用于描述四旋翼飞行器编队飞行产生的复杂气动效应。我们模型中的数据驱动组件是轻量级的,使其适用于基于优化的控制设计。通过仿真和物理实验,我们表明,将该模型集成到一种新的基于学习的非线性模型预测控制(MPC)框架中,可以在轨迹跟踪和抗干扰方面带来显著的性能提升。特别是在物理实验中,我们的框架明显优于标称MPC,在平均轨迹跟踪误差方面提高了40.1%,在最大垂直分离误差方面降低了57.5%。我们的框架还实现了卓越的样本效率,在仿真和物理实验中仅使用了总共46秒的飞行数据进行训练。此外,通过我们提出的框架,四旋翼飞行器实现了非常紧密的编队,在整个飞行过程中平均间隔小于1.5个机身长度。
🔬 方法详解
问题定义:论文旨在解决四旋翼飞行器在紧密编队飞行时,由于复杂的近场气动效应难以精确建模,导致控制性能下降的问题。现有的基于第一性原理的建模方法难以准确描述这些复杂的气动效应,而纯粹的数据驱动方法则需要大量的训练数据,且泛化能力有限。
核心思路:论文的核心思路是将基于第一性原理的建模方法与数据驱动的学习方法相结合,构建一个既能反映物理规律,又能通过数据进行修正的混合模型。这种方法旨在利用第一性原理提供模型的先验知识,并利用数据驱动方法来补偿模型中的不确定性和未建模动态。
技术框架:该框架包含以下几个主要模块:1) 基于第一性原理的四旋翼飞行器动力学模型;2) 用于补偿气动效应的数据驱动模型,该模型采用轻量级的设计,易于优化;3) 基于学习的非线性模型预测控制(MPC)器,该控制器利用混合模型进行预测,并通过优化控制输入来实现轨迹跟踪和编队控制。整体流程是,首先利用少量飞行数据训练数据驱动模型,然后将该模型集成到MPC控制器中,最后通过在线优化来实现编队飞行。
关键创新:论文最重要的技术创新点在于提出了一个结合第一性原理和数据驱动方法的混合建模框架,用于描述四旋翼飞行器编队飞行中的复杂气动效应。与传统的纯粹基于第一性原理或数据驱动的方法相比,该方法能够在保证模型准确性的同时,显著提高样本效率和泛化能力。
关键设计:数据驱动模型采用轻量级的设计,例如使用少量参数的神经网络或高斯过程回归,以降低计算复杂度并提高优化效率。MPC控制器的设计考虑了模型的非线性特性和约束条件,例如电机转速限制和安全距离约束。损失函数的设计包括轨迹跟踪误差、控制输入惩罚和编队维持惩罚等,以实现精确的轨迹跟踪和稳定的编队飞行。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在物理实验中显著优于标称MPC,平均轨迹跟踪误差降低了40.1%,最大垂直分离误差降低了57.5%。此外,该方法仅使用46秒的飞行数据进行训练,实现了卓越的样本效率。四旋翼飞行器实现了非常紧密的编队,在整个飞行过程中平均间隔小于1.5个机身长度。
🎯 应用场景
该研究成果可应用于无人机集群表演、协同搜索救援、以及复杂环境下的多无人机协同作业等领域。通过提高编队飞行的精度和稳定性,可以实现更复杂的飞行任务,并降低对飞行员的依赖,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
Flying quadrotors in tight formations is a challenging problem. It is known that in the near-field airflow of a quadrotor, the aerodynamic effects induced by the propellers are complex and difficult to characterize. Although machine learning tools can potentially be used to derive models that capture these effects, these data-driven approaches can be sample inefficient and the resulting models often do not generalize as well as their first-principles counterparts. In this work, we propose a framework that combines the benefits of first-principles modeling and data-driven approaches to construct an accurate and sample efficient representation of the complex aerodynamic effects resulting from quadrotors flying in formation. The data-driven component within our model is lightweight, making it amenable for optimization-based control design. Through simulations and physical experiments, we show that incorporating the model into a novel learning-based nonlinear model predictive control (MPC) framework results in substantial performance improvements in terms of trajectory tracking and disturbance rejection. In particular, our framework significantly outperforms nominal MPC in physical experiments, achieving a 40.1% improvement in the average trajectory tracking errors and a 57.5% reduction in the maximum vertical separation errors. Our framework also achieves exceptional sample efficiency, using only a total of 46 seconds of flight data for training across both simulations and physical experiments. Furthermore, with our proposed framework, the quadrotors achieve an exceptionally tight formation, flying with an average separation of less than 1.5 body lengths throughout the flight. A video illustrating our framework and physical experiments is given here: https://youtu.be/Hv-0JiVoJGo