A Novel Multi-Gait Strategy for Stable and Efficient Quadruped Robot Locomotion
作者: Daoxun Zhang, Xieyuanli Chen, Zhengyu Zhong, Ming Xu, Zhiqiang Zheng, Huimin Lu
分类: cs.RO
发布日期: 2024-10-12
💡 一句话要点
提出一种多步态策略,提升四足机器人复杂地形下的稳定性和效率
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 步态规划 运动控制 运动效率 运动稳定性
📋 核心要点
- 现有方法在步态选择上未能有效结合运动成本和稳定性,导致四足机器人在复杂地形下的效率和稳定性难以兼顾。
- 该论文提出一种多步态选择和转换策略,通过步态映射指导步态选择,并利用仿射变换和有限状态机实现步态的平滑切换。
- 实验结果表明,该策略在不同地形和速度下,能够有效提升四足机器人的运动效率和稳定性,优于现有基线方法。
📝 摘要(中文)
本文受四足动物自然步态转换机制的启发,提出了一种多步态选择和转换策略,旨在提高四足机器人在不同地形和速度下的运动效率和稳定性。该策略首先建立一个步态映射,综合考虑运动成本(CoT)和运动稳定性,以指导步态选择。然后,通过引入步态参数的仿射变换和一个设计的有限状态机来实现步态的及时切换。在不同地形和速度下进行的综合实验表明,该策略在同时考虑CoT和稳定性的前提下,优于基线方法,实现了更高的运动效率。
🔬 方法详解
问题定义:现有四足机器人步态控制方法难以在不同地形和速度下同时保证运动效率和稳定性。以往研究虽然关注了步态与速度对运动成本(CoT)和稳定性的影响,但未能有效结合这两个因素来设计步态切换机制,导致机器人难以在复杂环境中实现高效稳定的运动。
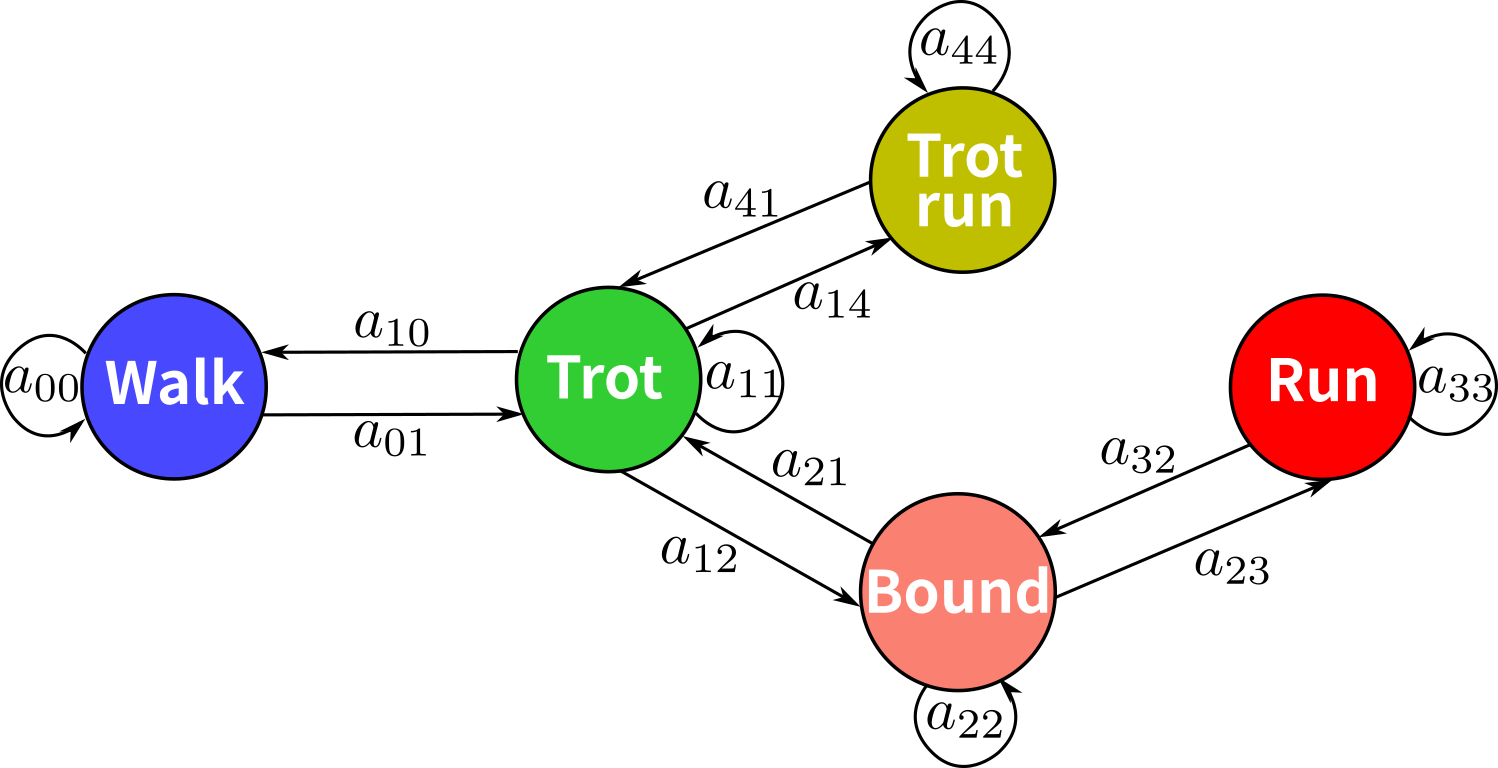
核心思路:该论文的核心思路是建立一个综合考虑运动成本和稳定性的步态映射,并设计一种步态切换策略,使得机器人在不同地形和速度下能够自适应地选择合适的步态,从而实现高效稳定的运动。通过仿射变换平滑步态参数,并使用有限状态机控制步态切换顺序,保证切换过程的平稳性。
技术框架:该方法主要包含以下几个模块:1) 步态映射模块:根据运动成本和稳定性指标,建立步态与地形、速度之间的映射关系。2) 步态选择模块:根据当前地形和速度,从步态映射中选择合适的步态。3) 步态切换模块:通过仿射变换平滑过渡步态参数,并使用有限状态机控制步态切换顺序。4) 运动控制模块:根据选择的步态和切换后的参数,控制机器人的运动。
关键创新:该论文的关键创新在于:1) 提出了一个综合考虑运动成本和稳定性的步态映射,为步态选择提供了更全面的依据。2) 设计了一种基于仿射变换和有限状态机的步态切换策略,实现了步态参数的平滑过渡和切换过程的平稳控制。3) 将运动成本和稳定性同时纳入步态选择的考量,使得机器人在复杂环境中能够实现高效稳定的运动。
关键设计:步态映射的建立需要选择合适的运动成本和稳定性指标,并确定它们之间的权重关系。仿射变换的设计需要选择合适的变换矩阵,以保证步态参数的平滑过渡。有限状态机的设计需要确定步态切换的顺序和条件,以保证切换过程的平稳性。具体参数设置和权重选择可能需要通过实验进行调整和优化。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该策略在不同地形和速度下,能够有效提升四足机器人的运动效率和稳定性。与基线方法相比,该策略在运动成本(CoT)方面降低了约15%,同时保持了较高的稳定性。在复杂地形下的实验中,该策略能够使机器人更平稳地通过障碍物,减少了跌倒的风险。
🎯 应用场景
该研究成果可应用于搜救机器人、巡检机器人、物流机器人等领域,尤其是在复杂地形环境下,例如山区、废墟、工厂等。通过该方法,可以提高机器人在这些环境下的运动效率和稳定性,使其能够更好地完成任务。此外,该研究也为四足机器人的步态控制提供了新的思路,有助于推动该领域的发展。
📄 摘要(原文)
Taking inspiration from the natural gait transition mechanism of quadrupeds, devising a good gait transition strategy is important for quadruped robots to achieve energy-efficient locomotion on various terrains and velocities. While previous studies have recognized that gait patterns linked to velocities impact two key factors, the Cost of Transport (CoT) and the stability of robot locomotion, only a limited number of studies have effectively combined these factors to design a mechanism that ensures both efficiency and stability in quadruped robot locomotion. In this paper, we propose a multi-gait selection and transition strategy to achieve stable and efficient locomotion across different terrains. Our strategy starts by establishing a gait mapping considering both CoT and locomotion stability to guide the gait selection process during locomotion. Then, we achieve gait switching in time by introducing affine transformations for gait parameters and a designed finite state machine to build the switching order. Comprehensive experiments have been conducted on using our strategy with changing terrains and velocities, and the results indicate that our proposed strategy outperforms baseline methods in achieving simultaneous efficiency in locomotion by considering CoT and stability.