Adaptive Compliance Policy: Learning Approximate Compliance for Diffusion Guided Control
作者: Yifan Hou, Zeyi Liu, Cheng Chi, Eric Cousineau, Naveen Kuppuswamy, Siyuan Feng, Benjamin Burchfiel, Shuran Song
分类: cs.RO
发布日期: 2024-10-12 (更新: 2025-03-07)
💡 一句话要点
提出自适应合规策略以解决操控中的合规性问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自适应合规策略 机器人操控 视觉运动控制 人类示范 动态调整 合规性估计 深度学习
📋 核心要点
- 现有的视觉运动控制方法往往忽视合规性,导致在复杂操控任务中无法有效应对不确定性。
- 本文提出的自适应合规策略(ACP)通过学习人类示范,动态调整系统的合规性,以适应不同的操控任务。
- 实验结果表明,ACP在处理复杂的接触任务时,性能提升超过50%,显著优于现有的视觉运动策略。
📝 摘要(中文)
合规性在操控中起着至关重要的作用,因为它在不确定性下平衡位置和力的控制。然而,现有的视觉运动策略往往忽视合规性,专注于位置控制。本文提出了自适应合规策略(ACP),该框架能够从人类示范中学习动态调整系统合规性,克服了依赖预设合规参数或假设均匀刚度的不足。我们估计了一个近似的合规性轮廓,具有避免大接触力和促进准确跟踪的特性。该方法使机器人能够处理复杂的接触丰富的操控任务,并相比于最先进的视觉运动策略方法实现了超过50%的性能提升。
🔬 方法详解
问题定义:本文旨在解决操控任务中合规性不足的问题。现有方法通常依赖于预设的合规参数,无法灵活应对不同的操控场景,导致性能下降。
核心思路:自适应合规策略(ACP)通过学习人类示范,动态调整合规性,避免大接触力并促进准确跟踪,从而提升操控性能。
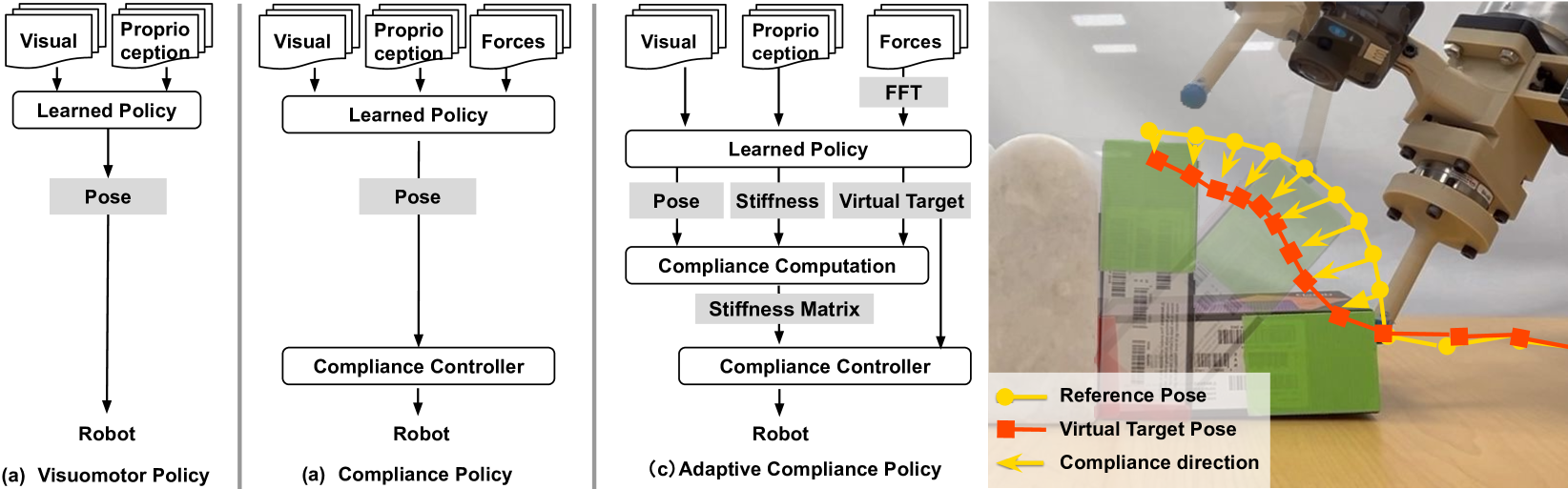
技术框架:ACP的整体架构包括数据收集、合规性估计和控制策略生成三个主要模块。首先,通过人类示范收集数据,然后估计合规性轮廓,最后生成控制策略以实现动态调整。
关键创新:ACP的主要创新在于其动态合规性调整能力,区别于传统方法的静态合规参数设置,使得机器人能够在复杂环境中更有效地进行操控。
关键设计:在设计中,采用了特定的损失函数来平衡合规性和跟踪精度,同时使用了深度学习网络来估计合规性轮廓,确保系统能够在多种任务中灵活应对。
🖼️ 关键图片


📊 实验亮点
实验结果显示,自适应合规策略(ACP)在复杂接触任务中的性能提升超过50%,显著优于当前最先进的视觉运动策略方法。这一成果表明,ACP在动态调整合规性方面的有效性,为未来的机器人操控提供了新的思路。
🎯 应用场景
该研究的潜在应用领域包括机器人抓取、装配和人机协作等场景。通过提升机器人的合规性控制能力,可以在复杂和动态的环境中实现更高效的操控,具有重要的实际价值和广泛的应用前景。
📄 摘要(原文)
Compliance plays a crucial role in manipulation, as it balances between the concurrent control of position and force under uncertainties. Yet compliance is often overlooked by today's visuomotor policies that solely focus on position control. This paper introduces Adaptive Compliance Policy (ACP), a novel framework that learns to dynamically adjust system compliance both spatially and temporally for given manipulation tasks from human demonstrations, improving upon previous approaches that rely on pre-selected compliance parameters or assume uniform constant stiffness. However, computing full compliance parameters from human demonstrations is an ill-defined problem. Instead, we estimate an approximate compliance profile with two useful properties: avoiding large contact forces and encouraging accurate tracking. Our approach enables robots to handle complex contact-rich manipulation tasks and achieves over 50\% performance improvement compared to state-of-the-art visuomotor policy methods. For result videos, see https://adaptive-compliance.github.io/