Design and Control of an Omnidirectional Aerial Robot with a Miniaturized Haptic Joystick for Physical Interaction
作者: Julien Mellet, Andrea Berra, Salvatore Marcellini, Miguel Ángel Trujillo Soto, Guillermo Heredia, Fabio Ruggiero, Vincenzo Lippiello
分类: cs.RO
发布日期: 2024-10-11
备注: 6 pages, 6 figures
💡 一句话要点
设计带触觉反馈的微型摇杆,用于全向空中机器人的物理交互
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 空中机器人 触觉反馈 遥操作 物理交互 微型化 全向运动 力反馈
📋 核心要点
- 空中物理交互对机器人提出了高要求,现有方案在设备小型化和操作便捷性方面存在挑战。
- 本文设计了一种微型化的触觉遥控器,能够提供6自由度的控制输入和4自由度的触觉反馈,增强操作员的感知能力。
- 通过开源仿真和初步飞行测试,验证了该系统在空中物理交互应用中的潜力,并展示了其在简化维护和提高推重比方面的优势。
📝 摘要(中文)
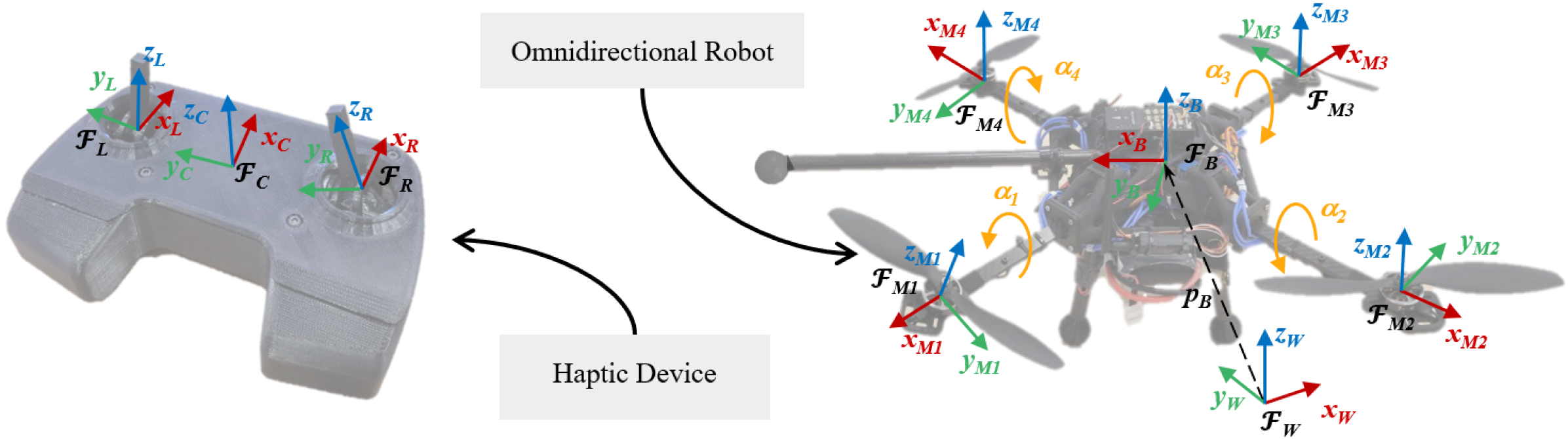
本文提出了一种用于空中遥操作的最小化系统设置,旨在提高这些技术的易用性。详细介绍了具有4自由度触觉反馈的6自由度摇杆的设计和控制。这是首个用于空中物理交互(APhI)的标准遥控器(RC)外形的触觉设备。通过微型化触觉设备,增强了遥控器的触觉感知,提高了物理感知能力。目标是为操作员提供视觉和听觉之外的额外感知,以帮助执行安全的APhI。据作者所知,这是第一个能够解耦每个单轴输入命令的遥操作系统。在全向四旋翼飞行器上,通过采用新设计减少组件数量,旨在简化维护,并提高推重比。开源的基于物理的仿真和成功的初步飞行测试表明,该工具在未来的APhI应用中具有前景。
🔬 方法详解
问题定义:现有的空中物理交互系统通常依赖于复杂的设备和操作界面,限制了其易用性和可访问性。操作员主要依赖视觉和听觉信息,缺乏触觉反馈,难以精确控制和感知交互过程中的力。因此,需要一种更紧凑、直观且能提供触觉反馈的遥操作方案。
核心思路:本文的核心思路是设计一种微型化的触觉遥控器,该遥控器具有标准遥控器的外形,易于操作员上手。通过集成触觉反馈,操作员可以感知到与环境的交互力,从而提高操作的精确性和安全性。同时,优化四旋翼飞行器的设计,减少组件数量,提高推重比,并简化维护。
技术框架:该系统主要包括两个部分:触觉遥控器和全向四旋翼飞行器。触觉遥控器负责接收操作员的输入,并提供触觉反馈。四旋翼飞行器根据遥控器的指令进行运动,并与环境进行交互。系统采用遥操作模式,操作员通过遥控器控制飞行器的运动,并感知交互力。
关键创新:该论文的关键创新在于:1) 设计了一种微型化的触觉遥控器,具有标准遥控器的外形,易于操作;2) 实现了6自由度的控制输入和4自由度的触觉反馈;3) 提出了能够解耦每个单轴输入命令的遥操作系统;4) 优化了四旋翼飞行器的设计,减少组件数量,提高推重比。
关键设计:触觉遥控器采用了力反馈技术,通过电机和传感器实现触觉反馈。四旋翼飞行器采用了全向设计,使其能够在三维空间内自由移动。控制算法采用了PID控制和力位混合控制,以实现精确的运动控制和力控制。具体参数设置和网络结构等技术细节在论文中未详细描述,属于未知信息。
🖼️ 关键图片


📊 实验亮点
初步飞行测试验证了该系统的可行性和有效性。开源的基于物理的仿真平台为进一步研究和开发提供了便利。虽然论文中没有提供具体的性能数据和对比基线,但强调了该系统在简化维护和提高推重比方面的优势,表明其在未来的空中物理交互应用中具有潜力。
🎯 应用场景
该研究成果可应用于多种场景,例如:桥梁检测、高空作业、灾难救援等。通过触觉反馈,操作员可以更安全、更精确地控制空中机器人完成复杂任务。此外,该系统还可以用于远程医疗、远程教育等领域,实现远程交互和协作。未来,随着技术的不断发展,该系统有望在更多领域得到应用。
📄 摘要(原文)
Fully actuated aerial robot proved their superiority for Aerial Physical Interaction (APhI) over the past years. This work proposes a minimal setup for aerial telemanipulation, enhancing accessibility of these technologies. The design and the control of a 6-DoF joystick with 4-DoF haptic feedback is detailed. It is the first haptic device with standard Remote Controller (RC) form factor for APhI. By miniaturizing haptic device, it enhances RC with the sense of touch, increasing physical awareness. The goal is to give operators an extra sense, other than vision and sound, to help to perform safe APhI. To the best of the authors knowledge, this is the first teleoperation system able to decouple each single axis input command. On the omnidirectional quadrotor, by reducing the number of components with a new design, we aim a simplified maintenance, and improved force and thrust to weight ratio. Open-sourced physic based simulation and successful preliminary flight tests highlighted the tool as promising for future APhI applications.