Implicit Graph Search for Planning on Graphs of Convex Sets
作者: Ramkumar Natarajan, Chaoqi Liu, Howie Choset, Maxim Likhachev
分类: cs.RO
发布日期: 2024-10-11
💡 一句话要点
提出基于隐式图搜索的INSATxGCS算法,加速凸集图上的运动规划。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 凸集图 隐式图搜索 机器人 轨迹优化
📋 核心要点
- 现有GCS方法在解决大规模机器人运动规划问题时,由于需要求解包含大量约束的优化问题,计算效率较低。
- 提出INSATxGCS(IxG)算法,通过隐式图搜索策略,仅在必要时探索凸集图,从而减少计算量。
- 实验结果表明,IxG算法在多个应用场景中优于GCS,尤其是在高自由度多臂装配任务中,规划速度显著提升。
📝 摘要(中文)
凸集图(GCS)是一种通过将规划空间分解为凸集来合成平滑轨迹的方法。它构建一个图来编码分解中的邻接关系,然后同时搜索该图并优化部分轨迹以获得最终轨迹。这需要解决一个混合整数凸规划(MICP)问题。为了减少计算时间,GCS提出了一种凸松弛方法,该方法在经验上非常紧密。尽管如此,对于实际的机器人问题,使用GCS进行运动规划仍然需要解决包含数百万约束的同步批量优化问题,这可能很慢。此外,GCS问题的大小与规划查询无关,这进一步加剧了该问题。受轨迹解仅位于凸集的一小部分上的观察的启发,我们提出了两种用于在凸集图上进行规划的隐式图搜索方法,称为INSATxGCS(IxG)和IxG*。交错搜索和轨迹优化(INSAT)是一种先前开发的算法,它在图上搜索和优化部分路径之间交替进行,以找到平滑的轨迹。通过在凸集图上使用隐式图搜索方法INSAT,我们实现了更快的规划,同时确保了更强的完整性和最优性保证。此外,引入基于搜索的技术来规划凸集图使我们能够轻松地利用成熟的技术,例如搜索并行化、惰性规划、随时规划和重新规划作为未来的工作。与GCS的数值比较表明,IxG在包括18自由度多臂装配场景规划在内的多个应用中都具有优越性。
🔬 方法详解
问题定义:论文旨在解决在高维空间中,基于凸集图(GCS)的运动规划计算效率低下的问题。传统的GCS方法需要预先构建完整的图,并求解一个大规模的混合整数凸规划(MICP)问题,这在实际机器人应用中非常耗时,尤其是在问题规模较大时。现有方法的痛点在于计算复杂度高,难以满足实时性要求。
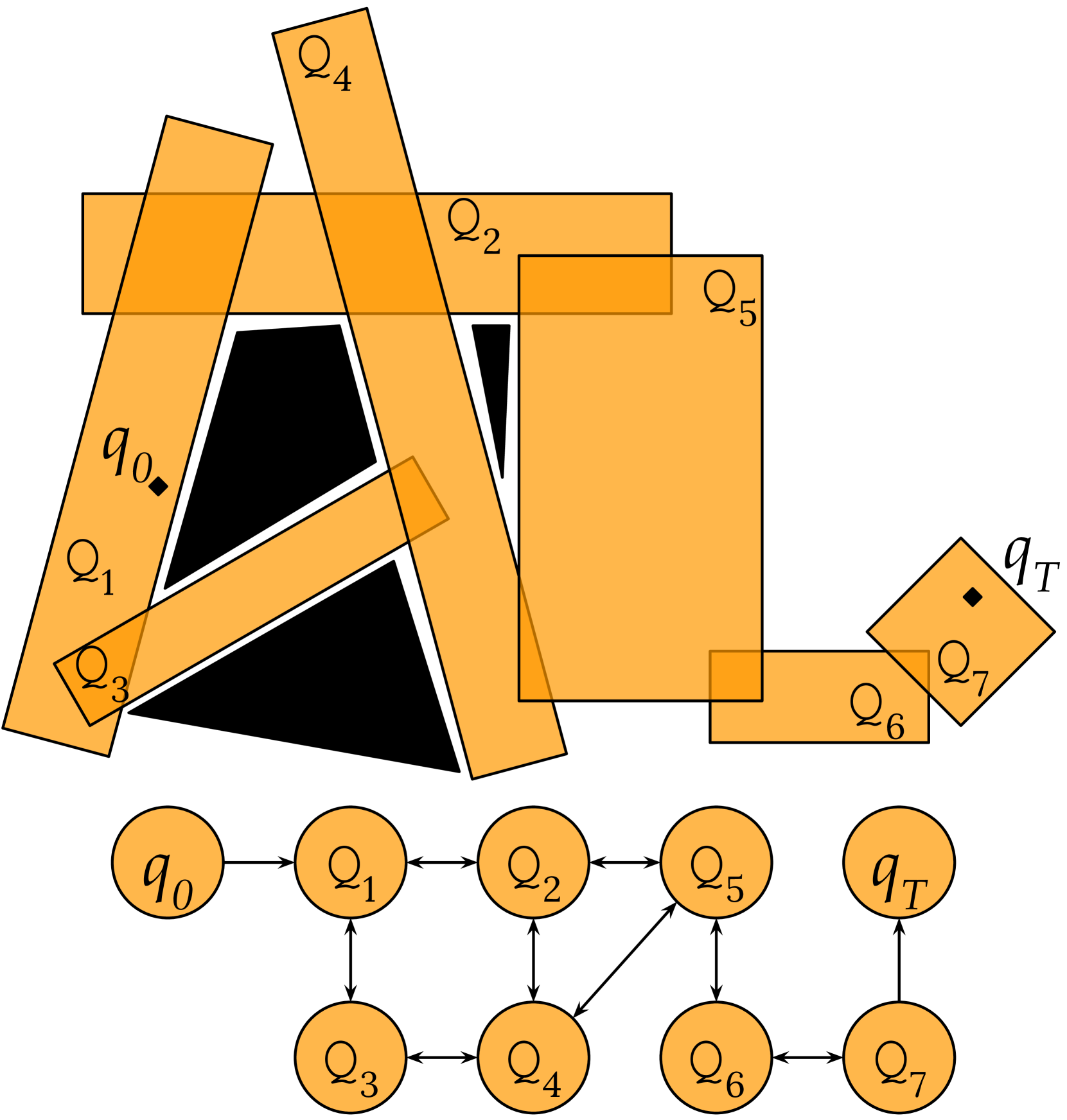
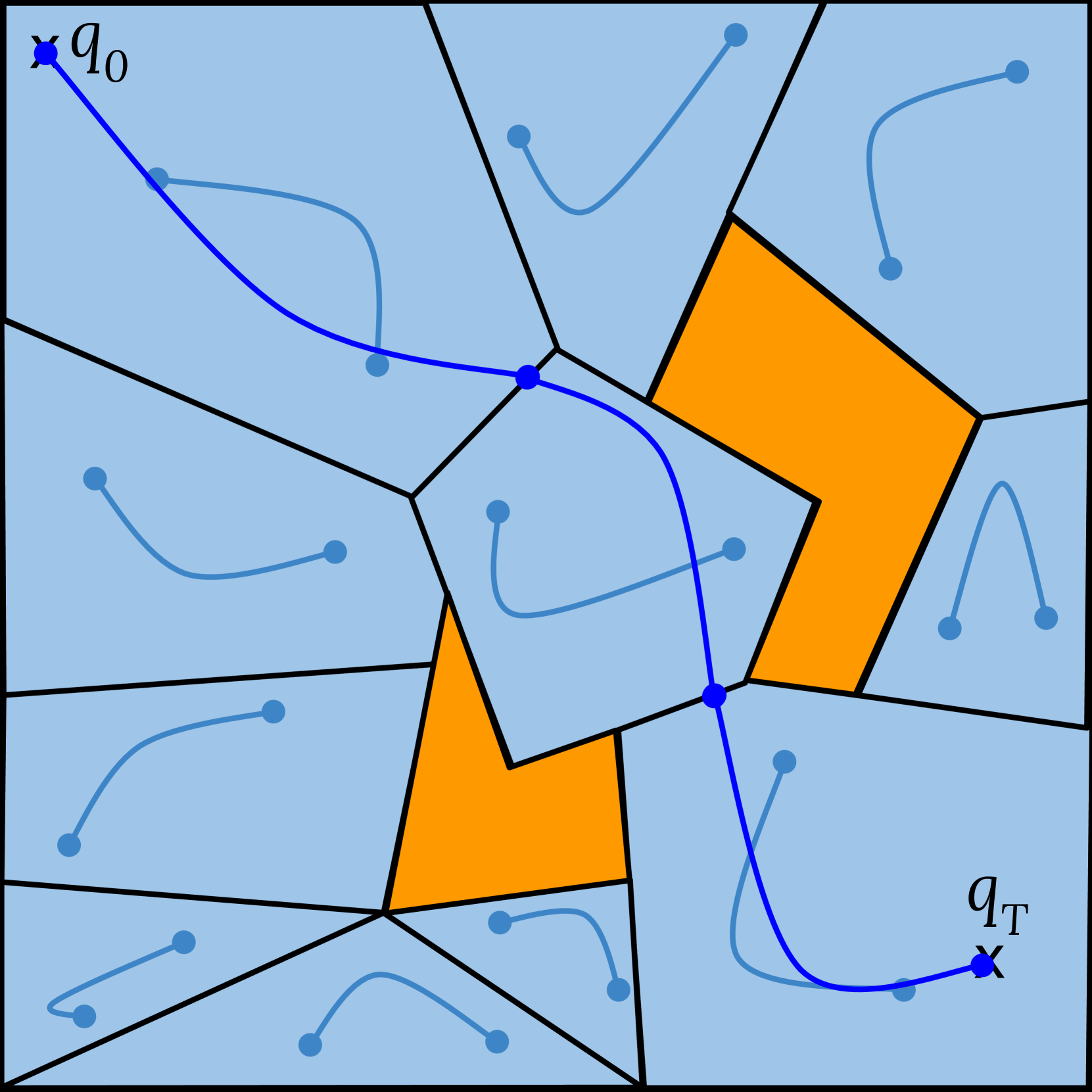
核心思路:论文的核心思路是利用隐式图搜索来避免预先构建完整的GCS图,而是根据规划需求,动态地探索和扩展图的节点。通过交错进行图搜索和轨迹优化,只对可能包含最优解的凸集进行优化,从而减少计算量,提高规划效率。
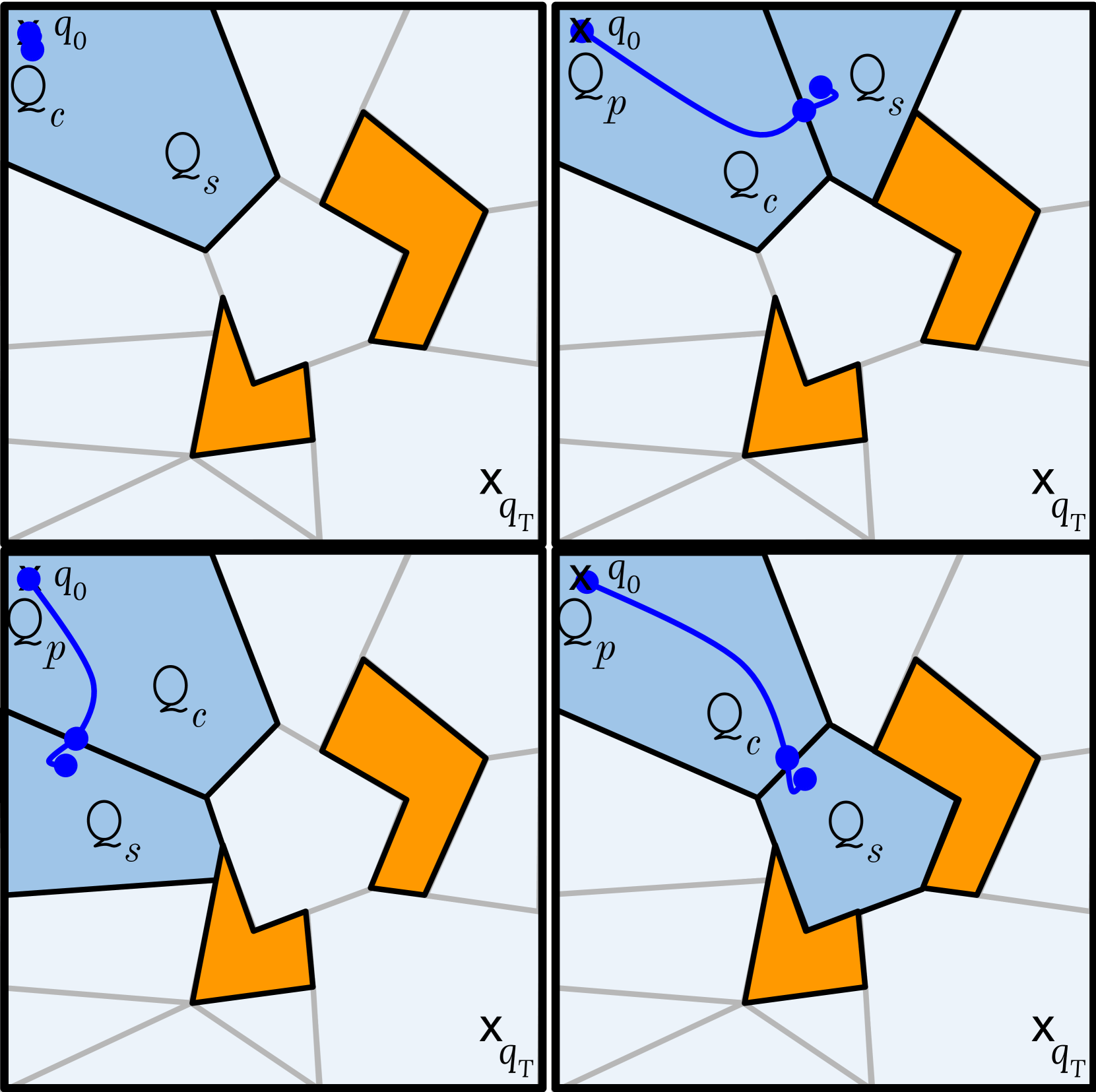
技术框架:IxG算法基于交错搜索和轨迹优化(INSAT)框架。整体流程如下: 1. 从起始状态开始,维护一个优先队列,队列中的元素是部分轨迹。 2. 从队列中选择优先级最高的轨迹,尝试扩展该轨迹。 3. 扩展过程中,使用隐式图搜索策略,只探索与当前轨迹相邻的凸集。 4. 对扩展后的轨迹进行局部优化,得到新的轨迹。 5. 将新的轨迹加入优先队列,重复步骤2-4,直到找到目标状态或达到最大迭代次数。
关键创新:最重要的技术创新点是引入了隐式图搜索策略到GCS框架中。与传统的GCS方法需要预先构建完整的图不同,IxG算法只在搜索过程中动态地探索和扩展图的节点,从而避免了对不必要的凸集进行优化。这种方法能够显著减少计算量,提高规划效率。
关键设计:IxG算法的关键设计包括: 1. 使用启发式函数来评估轨迹的优先级,例如轨迹的代价和到目标状态的估计距离。 2. 使用凸优化方法来对轨迹进行局部优化,例如使用梯度下降法或序列二次规划法。 3. 使用碰撞检测算法来确保轨迹的安全性。
🖼️ 关键图片
📊 实验亮点
实验结果表明,IxG算法在多个应用场景中优于传统的GCS方法。例如,在18自由度多臂装配场景中,IxG算法的规划速度比GCS算法快数倍,同时保证了轨迹的质量和安全性。这些结果验证了IxG算法在解决大规模运动规划问题方面的有效性。
🎯 应用场景
该研究成果可应用于各种机器人运动规划场景,尤其适用于高维、复杂环境下的任务,如多臂协同装配、无人驾驶车辆的路径规划、以及医疗机器人的手术规划等。通过提高规划效率,可以使机器人能够更快地响应环境变化,执行更复杂的任务,并降低计算资源的需求,从而推动机器人在更多领域的应用。
📄 摘要(原文)
Graphs of Convex Sets (GCS) is a recent method for synthesizing smooth trajectories by decomposing the planning space into convex sets, forming a graph to encode the adjacency relationships within the decomposition, and then simultaneously searching this graph and optimizing parts of the trajectory to obtain the final trajectory. To do this, one must solve a Mixed Integer Convex Program (MICP) and to mitigate computational time, GCS proposes a convex relaxation that is empirically very tight. Despite this tight relaxation, motion planning with GCS for real-world robotics problems translates to solving the simultaneous batch optimization problem that may contain millions of constraints and therefore can be slow. This is further exacerbated by the fact that the size of the GCS problem is invariant to the planning query. Motivated by the observation that the trajectory solution lies only on a fraction of the set of convex sets, we present two implicit graph search methods for planning on the graph of convex sets called INSATxGCS (IxG) and IxG*. INterleaved Search And Trajectory optimization (INSAT) is a previously developed algorithm that alternates between searching on a graph and optimizing partial paths to find a smooth trajectory. By using an implicit graph search method INSAT on the graph of convex sets, we achieve faster planning while ensuring stronger guarantees on completeness and optimality. Moveover, introducing a search-based technique to plan on the graph of convex sets enables us to easily leverage well-established techniques such as search parallelization, lazy planning, anytime planning, and replanning as future work. Numerical comparisons against GCS demonstrate the superiority of IxG across several applications, including planning for an 18-degree-of-freedom multi-arm assembly scenario.