Guiding Collision-Free Humanoid Multi-Contact Locomotion using Convex Kinematic Relaxations and Dynamic Optimization
作者: Carlos Gonzalez, Luis Sentis
分类: cs.RO
发布日期: 2024-10-10
备注: Accepted for publication in IEEE-RAS International Conference of Humanoid Robots (Humanoids 2024)
💡 一句话要点
提出基于凸松弛和动态优化的方法,引导人形机器人实现无碰撞多接触运动
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 多接触运动规划 凸松弛 动态优化 无碰撞路径规划 机器人导航 运动学 动力学
📋 核心要点
- 现有的人形机器人多接触规划方法在复杂环境下存在静态稳定假设或降阶模型依赖,导致可行性受限。
- 该论文提出一种新的多接触框架,利用凸松弛方法生成引导轨迹,再通过动态优化器优化,解决可行性问题。
- 实验结果表明,该方法能为不同尺寸的人形机器人生成包含多个多接触状态的运动规划,并保证关节空间的动态可行性。
📝 摘要(中文)
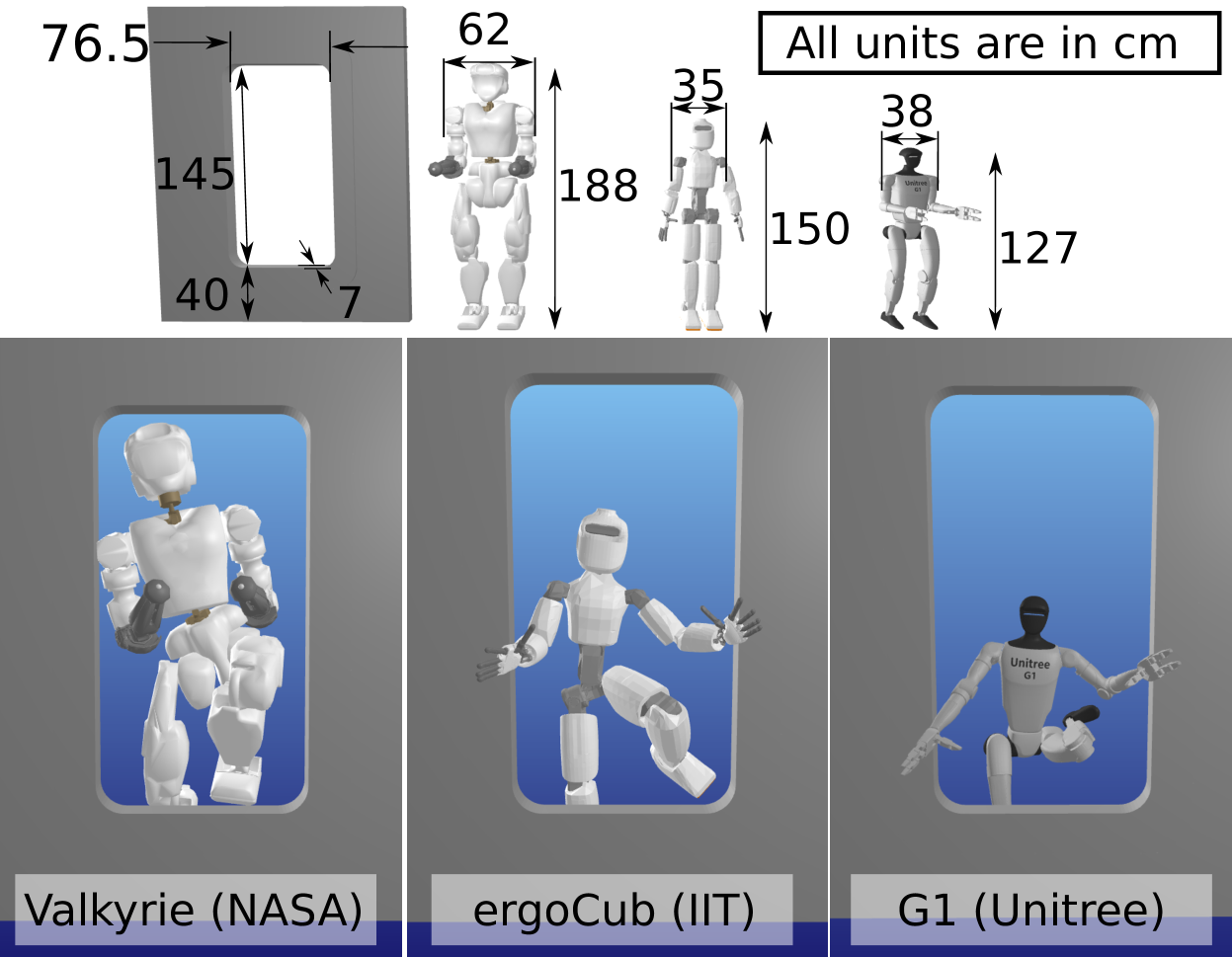
人形机器人依赖多接触规划器在各种环境中导航,包括非结构化和高度约束的环境。为了在合理的时间范围内合成稳定的多接触方案,大多数规划器假设静态稳定运动或依赖于降阶模型。然而,这些方法在存在大型障碍物或在接近运动学和动力学极限时也可能导致问题不可行。为此,我们提出了一种新的多接触框架,该框架利用了最近在将无碰撞路径规划松弛为凸优化问题方面的进展,并将其扩展到适用于人形多接触导航。我们的方法生成接近可行的轨迹,用作动态轨迹优化器中的指导,从而解决了上述限制。我们评估了我们的计算方法,展示了三个不同尺寸的人形机器人在模拟中使用我们提出的框架穿越高架海军人膝撞门。
🔬 方法详解
问题定义:论文旨在解决人形机器人在复杂环境中进行多接触运动规划的问题。现有的方法,如基于静态稳定假设或降阶模型的规划器,在面对大型障碍物或接近运动学和动力学极限时,常常无法找到可行的运动方案。这些方法忽略了动态可行性,导致规划结果在实际执行中可能失败。
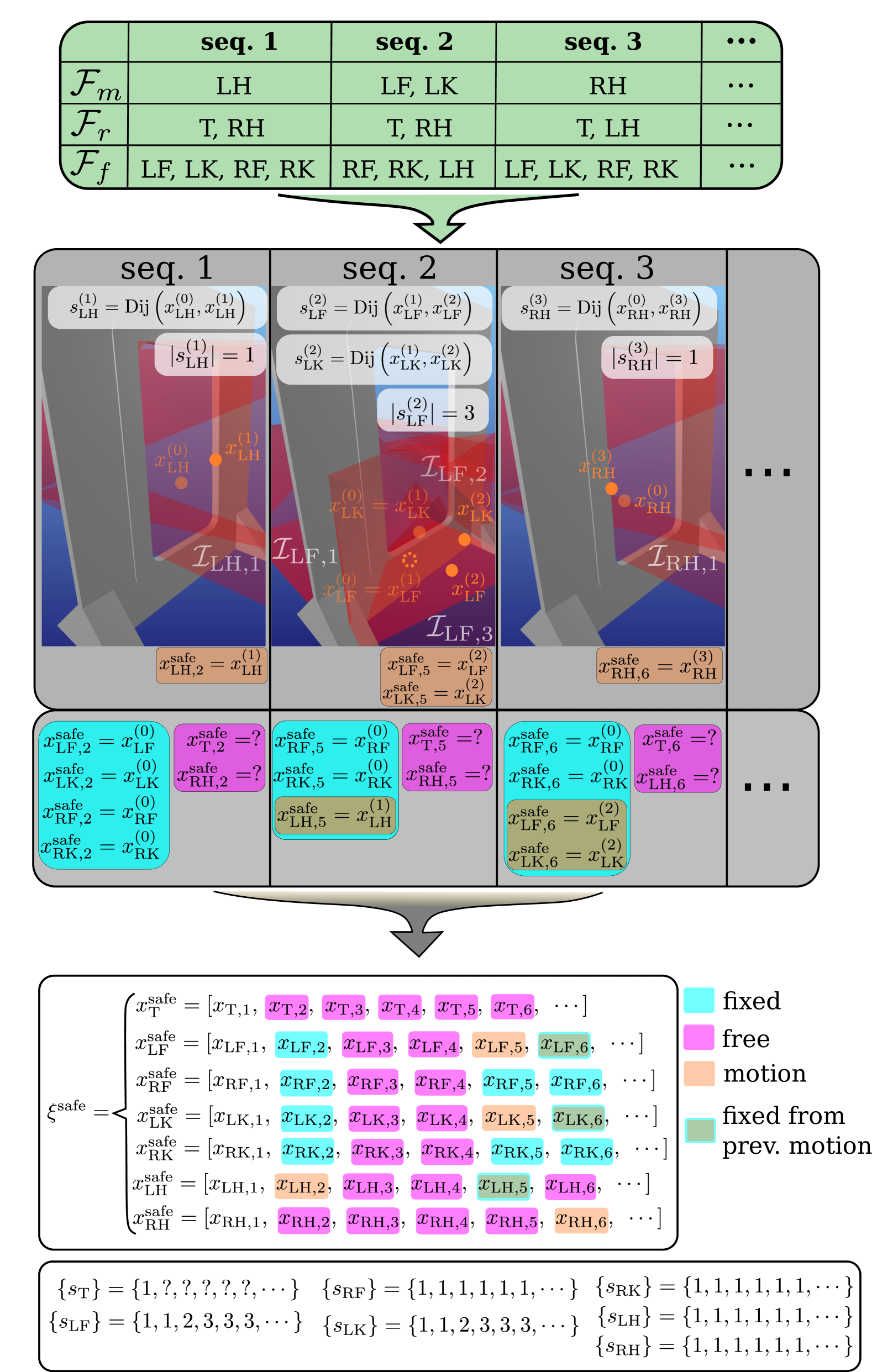
核心思路:论文的核心思路是将复杂的无碰撞多接触运动规划问题分解为两个阶段:首先,利用凸松弛方法生成一个接近可行的引导轨迹;然后,使用动态轨迹优化器对该轨迹进行优化,使其满足动力学约束,从而得到最终的运动规划。这种两阶段方法能够有效地利用凸优化的快速性和动态优化的精确性。
技术框架:该框架包含两个主要模块:1) 基于凸松弛的路径规划器:该模块将无碰撞路径规划问题转化为一个凸优化问题,从而可以快速生成一个初始的轨迹。这个轨迹可能不完全满足动力学约束,但它提供了一个良好的初始猜测。2) 动态轨迹优化器:该模块以凸松弛生成的轨迹为指导,通过优化目标函数,使得最终的轨迹满足动力学约束,并尽可能地接近初始轨迹。
关键创新:该论文的关键创新在于将凸松弛方法应用于人形机器人的多接触运动规划,并将其与动态优化器相结合。这种结合克服了传统方法在复杂环境中难以找到可行解的局限性。通过凸松弛,可以快速生成一个接近可行的初始轨迹,从而为动态优化器提供了一个良好的起点,加速了优化过程,并提高了找到可行解的可能性。
关键设计:凸松弛部分,论文可能采用了诸如线性化碰撞约束、使用凸包近似非凸区域等技术。动态优化器部分,可能采用了诸如直接搭配法(Direct Collocation)或伪谱法(Pseudospectral Method)等方法,并设计了合适的代价函数,例如最小化关节力矩、跟踪目标姿态等。具体的参数设置和损失函数细节未知,需要查阅论文原文。
🖼️ 关键图片

📊 实验亮点
论文通过仿真实验验证了该方法的有效性,展示了三个不同尺寸的人形机器人使用该框架穿越高架海军人膝撞门。该方法能够在几秒钟内生成包含多个多接触状态的运动规划,并保证关节空间的动态可行性。具体的性能数据和对比基线未知,需要在论文中查找。
🎯 应用场景
该研究成果可应用于人形机器人在复杂环境中的导航和操作,例如灾难救援、工业维护、家庭服务等。通过该方法,人形机器人可以在狭窄空间、崎岖地形或存在障碍物的环境中安全、高效地移动和执行任务,提高机器人的自主性和适应性。未来,该技术有望进一步扩展到其他类型的机器人,如四足机器人、无人机等。
📄 摘要(原文)
Humanoid robots rely on multi-contact planners to navigate a diverse set of environments, including those that are unstructured and highly constrained. To synthesize stable multi-contact plans within a reasonable time frame, most planners assume statically stable motions or rely on reduced order models. However, these approaches can also render the problem infeasible in the presence of large obstacles or when operating near kinematic and dynamic limits. To that end, we propose a new multi-contact framework that leverages recent advancements in relaxing collision-free path planning into a convex optimization problem, extending it to be applicable to humanoid multi-contact navigation. Our approach generates near-feasible trajectories used as guides in a dynamic trajectory optimizer, altogether addressing the aforementioned limitations. We evaluate our computational approach showcasing three different-sized humanoid robots traversing a high-raised naval knee-knocker door using our proposed framework in simulation. Our approach can generate motion plans within a few seconds consisting of several multi-contact states, including dynamic feasibility in joint space.