LiPO: LiDAR Inertial Odometry for ICP Comparison
作者: Darwin Mick, Taylor Pool, Madankumar Sathenahally Nagaraju, Michael Kaess, Howie Choset, Matt Travers
分类: cs.RO
发布日期: 2024-10-10
备注: Submitted to ICRA 2025
💡 一句话要点
LiPO:用于ICP方法比较的激光雷达惯性里程计框架
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 激光雷达 惯性里程计 点云配准 ICP算法 机器人导航
📋 核心要点
- 现有LIO中ICP方法选择缺乏量化分析,P2P-ICP通用性好但精度较低,P2F-ICP精度高但依赖环境。
- 提出LiPO框架,用于直接比较P2P-ICP和P2F-ICP,量化二者在不同环境和运动下的性能权衡。
- 实验表明,P2F-ICP总体精度更高,但P2P-ICP在不同环境和运动中更稳定,漂移增加较小。
📝 摘要(中文)
本文介绍了一种名为LiPO的激光雷达惯性里程计(LIO)框架,该框架能够直接比较不同的迭代最近点(ICP)点云配准方法。我们比较了两种常见的ICP方法:点到点(P2P)和点到特征(P2F)。根据我们的经验,在LIO的背景下,与P2P-ICP相比,当机器人在具有挑战性的环境中积极移动时,P2F-ICP可以减少漂移并提高建图精度。然而,P2F-ICP方法需要更多手动调整的超参数,这使得P2F-ICP在所有环境和运动中的通用性降低。在机器人被用于不同环境的实际机器人应用中,尽管漂移增加,但可能更倾向于使用更通用的P2P-ICP方法。在本文中,我们试图更好地量化P2P-ICP和P2F-ICP之间的权衡,以帮助确定何时应该使用每种方法。为了探索这种权衡,我们使用LiPO直接比较ICP方法,并在相关的基准数据集以及我们定制的无人地面车辆(UGV)上进行测试。我们发现,总的来说,P2F-ICP降低了漂移并提高了建图精度,但是,P2P-ICP在所有环境和运动中更加一致,且漂移增加最小。
🔬 方法详解
问题定义:论文旨在解决激光雷达惯性里程计(LIO)中,选择合适的迭代最近点(ICP)方法的问题。现有的P2P-ICP方法虽然通用性较好,但精度较低,容易产生漂移。而P2F-ICP方法精度较高,但需要手动调整较多超参数,对环境和运动的适应性较差。因此,需要一种方法来量化P2P-ICP和P2F-ICP之间的权衡,以便在不同的应用场景中选择合适的ICP方法。
核心思路:论文的核心思路是构建一个名为LiPO的LIO框架,该框架能够直接比较不同的ICP方法,并在不同的数据集和实际环境中进行测试。通过量化P2P-ICP和P2F-ICP在不同环境和运动下的性能差异,从而更好地理解二者之间的权衡,并为ICP方法的选择提供指导。
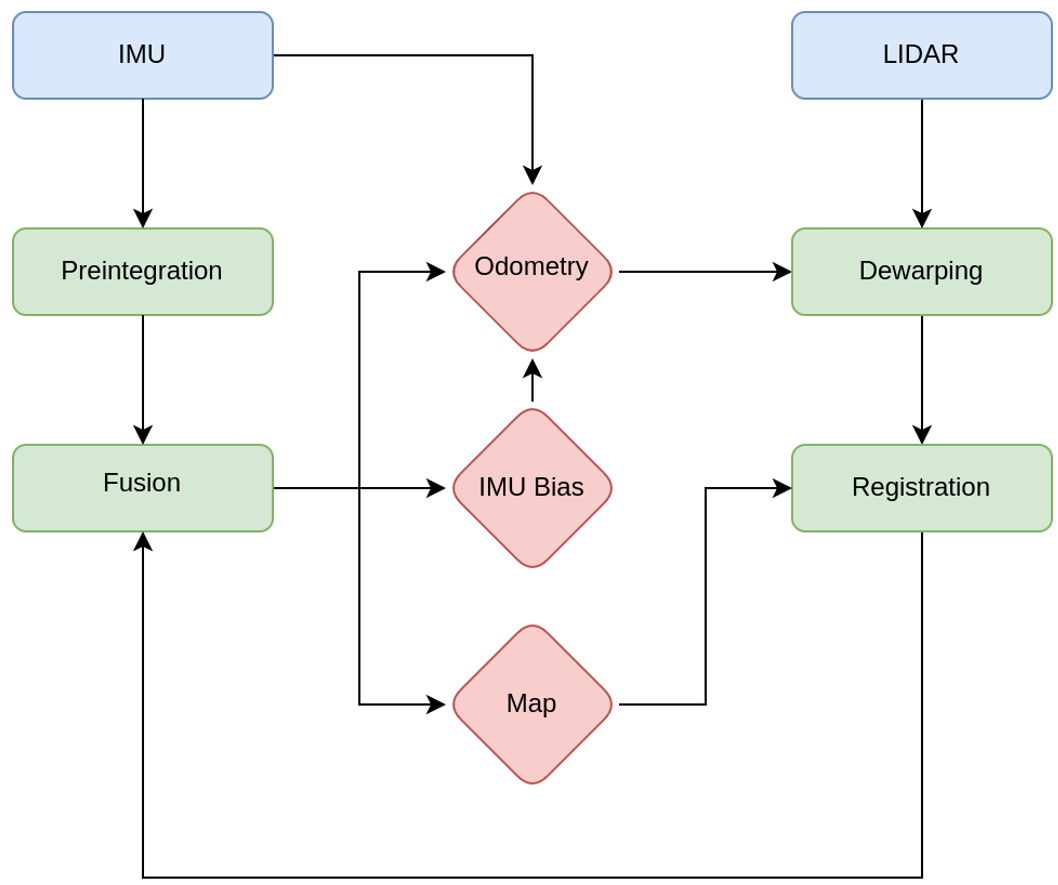
技术框架:LiPO框架是一个激光雷达惯性里程计系统,它集成了激光雷达和惯性测量单元(IMU)的数据。该框架的主要模块包括:1) 激光雷达数据预处理;2) IMU数据预处理;3) 激光雷达和IMU数据融合;4) 基于ICP的点云配准;5) 位姿估计和地图构建。该框架允许用户选择不同的ICP方法(如P2P-ICP或P2F-ICP)进行点云配准,并比较它们在不同环境和运动下的性能。
关键创新:该论文的关键创新在于提出了LiPO框架,该框架能够直接比较不同的ICP方法,并量化它们在不同环境和运动下的性能差异。此外,该论文还通过实验验证了P2P-ICP和P2F-ICP之间的权衡,并为ICP方法的选择提供了有价值的指导。与现有方法相比,LiPO提供了一种更系统、更客观的方法来评估和比较不同的ICP方法。
关键设计:LiPO框架的关键设计包括:1) 灵活的ICP方法选择机制,允许用户选择不同的ICP方法进行点云配准;2) 精确的激光雷达和IMU数据融合算法,能够充分利用两种传感器的数据;3) 鲁棒的位姿估计和地图构建算法,能够有效地抑制漂移并提高建图精度。论文中没有详细描述具体的参数设置、损失函数或网络结构,这些可能是标准ICP算法中的常用设置。
🖼️ 关键图片

📊 实验亮点
实验结果表明,P2F-ICP在总体上具有更低的漂移和更高的建图精度。然而,P2P-ICP在所有环境和运动中表现出更强的一致性,并且漂移增加幅度很小。这些结果量化了P2P-ICP和P2F-ICP之间的权衡,为在不同应用场景中选择合适的ICP方法提供了有价值的参考。
🎯 应用场景
该研究成果可应用于机器人导航、自动驾驶、三维地图重建等领域。通过LiPO框架,可以根据具体应用场景选择合适的ICP方法,从而提高定位精度和建图质量。该研究有助于提升机器人在复杂环境下的自主导航能力,具有重要的实际应用价值和未来发展潜力。
📄 摘要(原文)
We introduce a LiDAR inertial odometry (LIO) framework, called LiPO, that enables direct comparisons of different iterative closest point (ICP) point cloud registration methods. The two common ICP methods we compare are point-to-point (P2P) and point-to-feature (P2F). In our experience, within the context of LIO, P2F-ICP results in less drift and improved mapping accuracy when robots move aggressively through challenging environments when compared to P2P-ICP. However, P2F-ICP methods require more hand-tuned hyper-parameters that make P2F-ICP less general across all environments and motions. In real-world field robotics applications where robots are used across different environments, more general P2P-ICP methods may be preferred despite increased drift. In this paper, we seek to better quantify the trade-off between P2P-ICP and P2F-ICP to help inform when each method should be used. To explore this trade-off, we use LiPO to directly compare ICP methods and test on relevant benchmark datasets as well as on our custom unpiloted ground vehicle (UGV). We find that overall, P2F-ICP has reduced drift and improved mapping accuracy, but, P2P-ICP is more consistent across all environments and motions with minimal drift increase.