Online DNN-driven Nonlinear MPC for Stylistic Humanoid Robot Walking with Step Adjustment
作者: Giulio Romualdi, Paolo Maria Viceconte, Lorenzo Moretti, Ines Sorrentino, Stefano Dafarra, Silvio Traversaro, Daniele Pucci
分类: cs.RO
发布日期: 2024-10-10
备注: This paper has been accepted for publication at the 2024 IEEE-RAS International Conference on Humanoid Robots,(Humanoids) Nancy, France, 2024
💡 一句话要点
提出基于DNN驱动的非线性MPC方法,实现具有步态调整的拟人机器人风格化行走
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 步态生成 深度神经网络 模型预测控制 非线性优化 卡尔曼滤波 风格化运动
📋 核心要点
- 现有方法难以使人形机器人自然地模仿人类的行走风格,并且缺乏在线调整步态以应对复杂环境的能力。
- 该方法利用DNN学习人类运动数据,生成初始轨迹,并结合非线性优化和模型预测控制实现动态可行和风格化的行走。
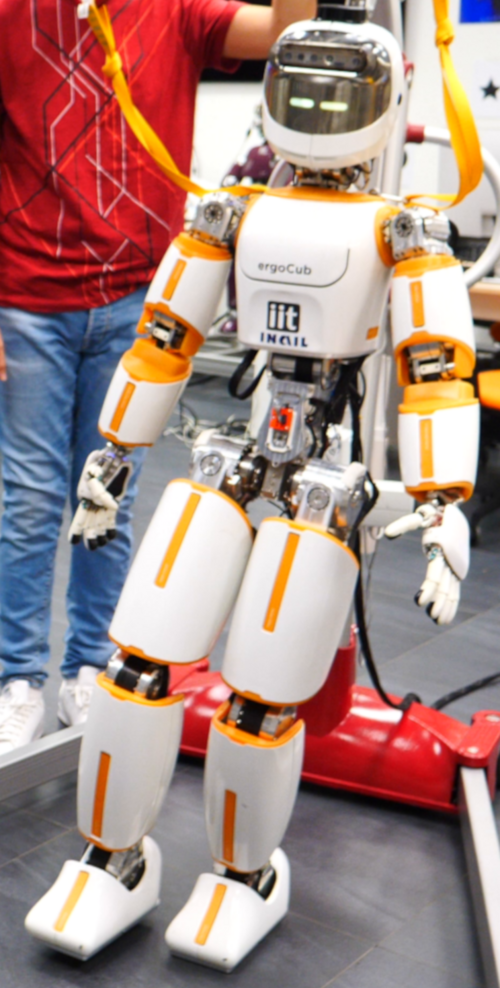
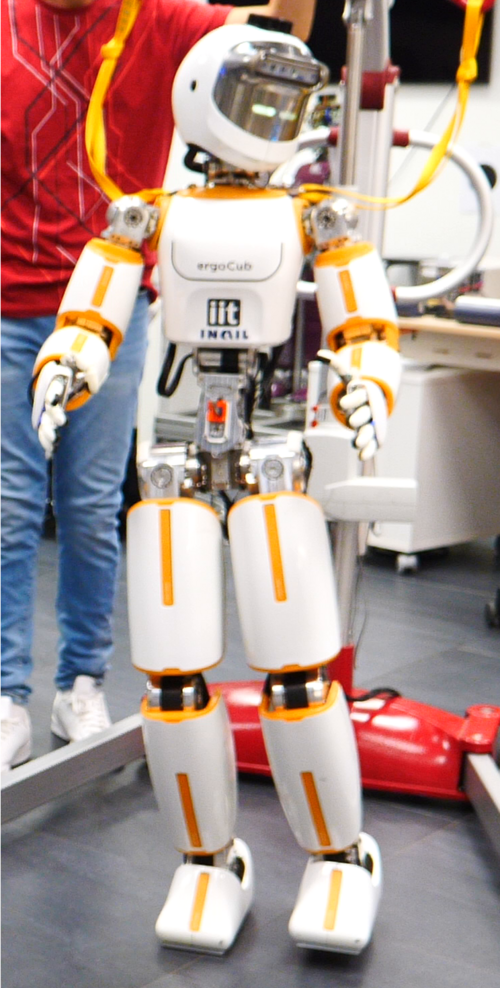
- 实验表明,该系统能够使ergoCub机器人模仿人类行走风格,防止跌倒,并能抵抗高达68牛顿的外部扰动。
📝 摘要(中文)
本文提出了一种三层架构,该架构能够实现具有在线接触位置调整的风格化运动。我们的方法结合了一个自回归深度神经网络(DNN)作为轨迹生成层,以及一个基于模型的轨迹调整层和轨迹控制层。DNN产生质心(CoM)和姿势参考,作为其他层的初始猜测和正则化项。由于DNN是在人体运动捕捉数据上训练的,因此产生的机器人运动表现出类似人类行走风格的运动模式。轨迹调整层利用非线性优化来确保动态可行的质心运动,同时处理步长调整。我们比较了轨迹调整层的两种实现方式:一种是后退水平面规划器(RHP),另一种是模型预测控制器(MPC)。为了提高MPC的性能,我们引入了卡尔曼滤波器来减少测量噪声。滤波器参数通过遗传算法自动调整。在ergoCub人形机器人上的实验结果表明,该系统能够防止跌倒,复制人类行走风格,并承受高达68牛顿的扰动。
🔬 方法详解
问题定义:现有的人形机器人步态生成方法通常难以兼顾运动的自然性和对环境变化的适应性。直接模仿人类运动捕捉数据可能导致动力学不可行,而传统的控制方法难以产生风格化的行走步态。因此,需要一种能够生成自然、动态可行且可在线调整的机器人步态方法。
核心思路:该论文的核心思路是结合深度学习和模型预测控制的优势。利用DNN学习人类运动数据,生成具有人类风格的初始轨迹,然后通过非线性优化和模型预测控制,对轨迹进行调整,确保其动力学可行性,并能根据环境变化在线调整步态。
技术框架:该系统采用三层架构:1) 轨迹生成层:使用自回归DNN生成质心和姿势参考轨迹。2) 轨迹调整层:使用非线性优化(RHP或MPC)调整轨迹,确保动力学可行性并进行步长调整。3) 轨迹控制层:未知,原文未详细描述。为了提高MPC性能,引入了卡尔曼滤波器来减少测量噪声。
关键创新:该方法的主要创新在于将DNN生成的风格化轨迹与模型预测控制相结合,实现了具有人类风格且动态可行的人形机器人行走。此外,使用遗传算法自动调整卡尔曼滤波器的参数,提高了系统的鲁棒性。
关键设计:DNN的结构和训练方式未知,原文未详细描述。轨迹调整层使用非线性优化,目标函数包含质心运动的动力学约束、步长调整约束和对DNN生成轨迹的正则化项。卡尔曼滤波器的参数通过遗传算法自动调整,以最小化预测误差。
🖼️ 关键图片

📊 实验亮点
实验结果表明,该系统能够使ergoCub机器人模仿人类行走风格,并能抵抗高达68牛顿的外部扰动。通过遗传算法优化的卡尔曼滤波器有效地降低了测量噪声,提高了MPC的性能。该系统成功地实现了在线步态调整,使机器人能够适应不同的环境。
🎯 应用场景
该研究成果可应用于服务型机器人、康复机器人和娱乐机器人等领域。通过模仿人类的行走风格,可以提高机器人与人类交互的自然性和亲和力。在线步态调整能力使得机器人能够在复杂环境中安全稳定地行走,从而扩展其应用范围。此外,该方法也可以推广到其他类型的机器人运动控制中。
📄 摘要(原文)
This paper presents a three-layered architecture that enables stylistic locomotion with online contact location adjustment. Our method combines an autoregressive Deep Neural Network (DNN) acting as a trajectory generation layer with a model-based trajectory adjustment and trajectory control layers. The DNN produces centroidal and postural references serving as an initial guess and regularizer for the other layers. Being the DNN trained on human motion capture data, the resulting robot motion exhibits locomotion patterns, resembling a human walking style. The trajectory adjustment layer utilizes non-linear optimization to ensure dynamically feasible center of mass (CoM) motion while addressing step adjustments. We compare two implementations of the trajectory adjustment layer: one as a receding horizon planner (RHP) and the other as a model predictive controller (MPC). To enhance MPC performance, we introduce a Kalman filter to reduce measurement noise. The filter parameters are automatically tuned with a Genetic Algorithm. Experimental results on the ergoCub humanoid robot demonstrate the system's ability to prevent falls, replicate human walking styles, and withstand disturbances up to 68 Newton. Website: https://sites.google.com/view/dnn-mpc-walking Youtube video: https://www.youtube.com/watch?v=x3tzEfxO-xQ