Mastering Contact-rich Tasks by Combining Soft and Rigid Robotics with Imitation Learning
作者: Mariano Ramírez Montero, Ebrahim Shahabi, Giovanni Franzese, Jens Kober, Barbara Mazzolai, Cosimo Della Santina
分类: cs.RO, cs.AI
发布日期: 2024-10-10 (更新: 2025-11-05)
备注: Update with additional results and experiments
💡 一句话要点
结合软硬机器人与模仿学习,实现高泛化性的接触密集型任务
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 软硬结合机器人 模仿学习 接触密集型任务 机器人控制 机器人泛化性
📋 核心要点
- 软体机器人控制精度不足,刚性机器人缺乏灵活性,限制了其在复杂环境中的应用。
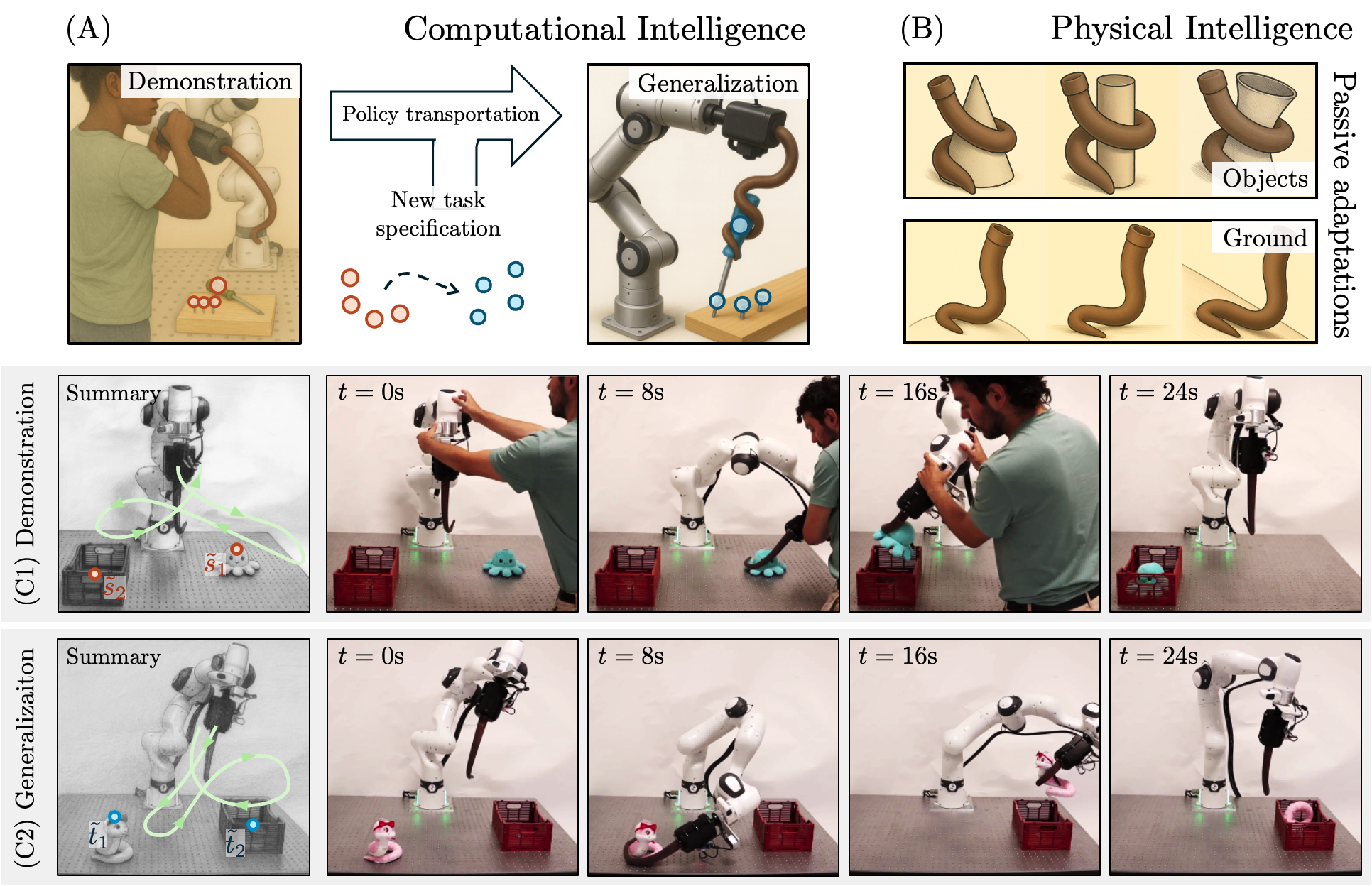
- 提出一种混合机器人平台,结合刚性机械臂和软体手臂,利用模仿学习实现任务泛化。
- 该平台通过软硬结合,在保证精度的同时,提升了机器人与环境交互的适应性和鲁棒性。
📝 摘要(中文)
软体机器人具有与环境建立安全、鲁棒和适应性交互的潜力,有望彻底改变机器人系统的应用,但其精确控制仍然具有挑战性。相比之下,传统的刚性机器人具有高精度和可重复性,但缺乏软体机器人的灵活性。我们认为,在混合机器人平台中结合这些特性可以显著增强整体能力。本文提出了一种新型混合机器人平台,该平台集成了刚性机械臂和一个完全开发的软体手臂。该系统配备了必要的智能,可以通过模仿学习自主执行灵活和可泛化的任务。物理上的柔软性和机器学习使我们的平台能够获得高度可泛化的技能,而刚性组件则确保了精度和可重复性。
🔬 方法详解
问题定义:现有机器人系统在接触密集型任务中面临精度和泛化性的挑战。刚性机器人虽然精度高,但在复杂环境中容易发生碰撞,适应性差。软体机器人虽然适应性强,但控制精度较低。因此,如何设计一种既能保证精度,又能适应复杂环境的机器人系统是一个关键问题。
核心思路:本文的核心思路是将刚性机器人和软体机器人结合起来,利用刚性机器人的高精度和软体机器人的高适应性,优势互补。同时,采用模仿学习的方法,让机器人能够从人类演示中学习任务技能,提高泛化能力。
技术框架:该混合机器人平台由一个刚性机械臂和一个软体手臂组成。刚性机械臂负责提供精确的运动控制,软体手臂负责与环境进行柔顺的交互。系统通过模仿学习框架,从人类演示数据中学习任务策略。该框架包括数据采集、特征提取、模型训练和策略执行等模块。
关键创新:该研究的关键创新在于将软硬机器人集成到一个平台中,并结合模仿学习方法,实现了高泛化性的接触密集型任务。这种混合架构能够充分利用刚性和软性机器人的优点,克服了单一机器人的局限性。
关键设计:在模仿学习方面,论文可能采用了某种特定的神经网络结构(具体结构未知)来学习任务策略。损失函数的设计可能考虑了位置误差、力矩误差等因素。此外,刚性和软性部件的协同控制策略也是一个关键的设计点,具体实现方式未知。
🖼️ 关键图片


📊 实验亮点
论文展示了该混合机器人平台在接触密集型任务中的优越性能。通过模仿学习,机器人能够成功完成一些复杂的任务,例如插拔操作、物体抓取等。具体的性能数据和对比基线未知,但论文强调了该平台在泛化能力方面的优势,能够适应不同的环境和任务。
🎯 应用场景
该研究成果可应用于医疗康复、精密装配、食品加工等领域。在这些领域中,机器人需要与环境进行柔顺的交互,同时保证一定的精度。例如,在医疗康复中,机器人可以辅助医生进行手术操作,或者帮助患者进行康复训练。在精密装配中,机器人可以完成一些需要高精度和灵活性的装配任务。
📄 摘要(原文)
Soft robots have the potential to revolutionize the use of robotic systems with their capability of establishing safe, robust, and adaptable interactions with their environment, but their precise control remains challenging. In contrast, traditional rigid robots offer high accuracy and repeatability but lack the flexibility of soft robots. We argue that combining these characteristics in a hybrid robotic platform can significantly enhance overall capabilities. This work presents a novel hybrid robotic platform that integrates a rigid manipulator with a fully developed soft arm. This system is equipped with the intelligence necessary to perform flexible and generalizable tasks through imitation learning autonomously. The physical softness and machine learning enable our platform to achieve highly generalizable skills, while the rigid components ensure precision and repeatability.