Stop-N-Go: Search-based Conflict Resolution for Motion Planning of Multiple Robotic Manipulators
作者: Gidon Han, Jeongwoo Park, Changjoo Nam
分类: cs.RO
发布日期: 2024-10-10
💡 一句话要点
提出基于搜索的冲突消解方法Stop-N-Go,解决多机器人协作运动规划问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多机器人运动规划 冲突消解 A*搜索 轨迹规划 机器人协作
📋 核心要点
- 多机器人运动规划在拥挤环境中面临挑战,传统耦合空间规划方法难以扩展,解耦规划易产生冲突。
- Stop-N-Go方法通过在个体轨迹中插入暂停,利用A*搜索最小化完工时间,解决冲突和目标位置阻塞问题。
- 实验表明,该方法能有效解决传统方法无法处理的复杂场景,为多机器人协作提供可行方案。
📝 摘要(中文)
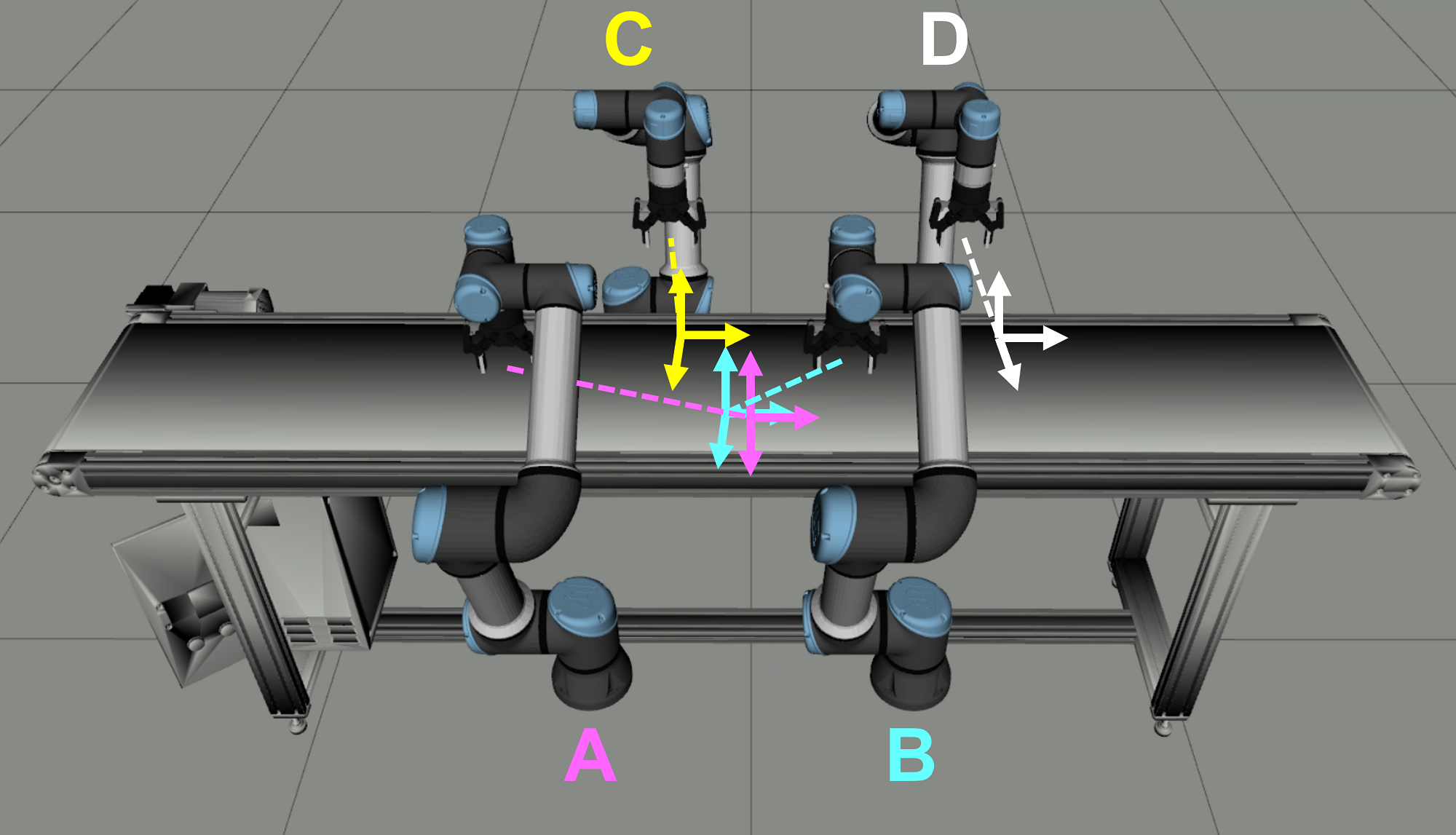
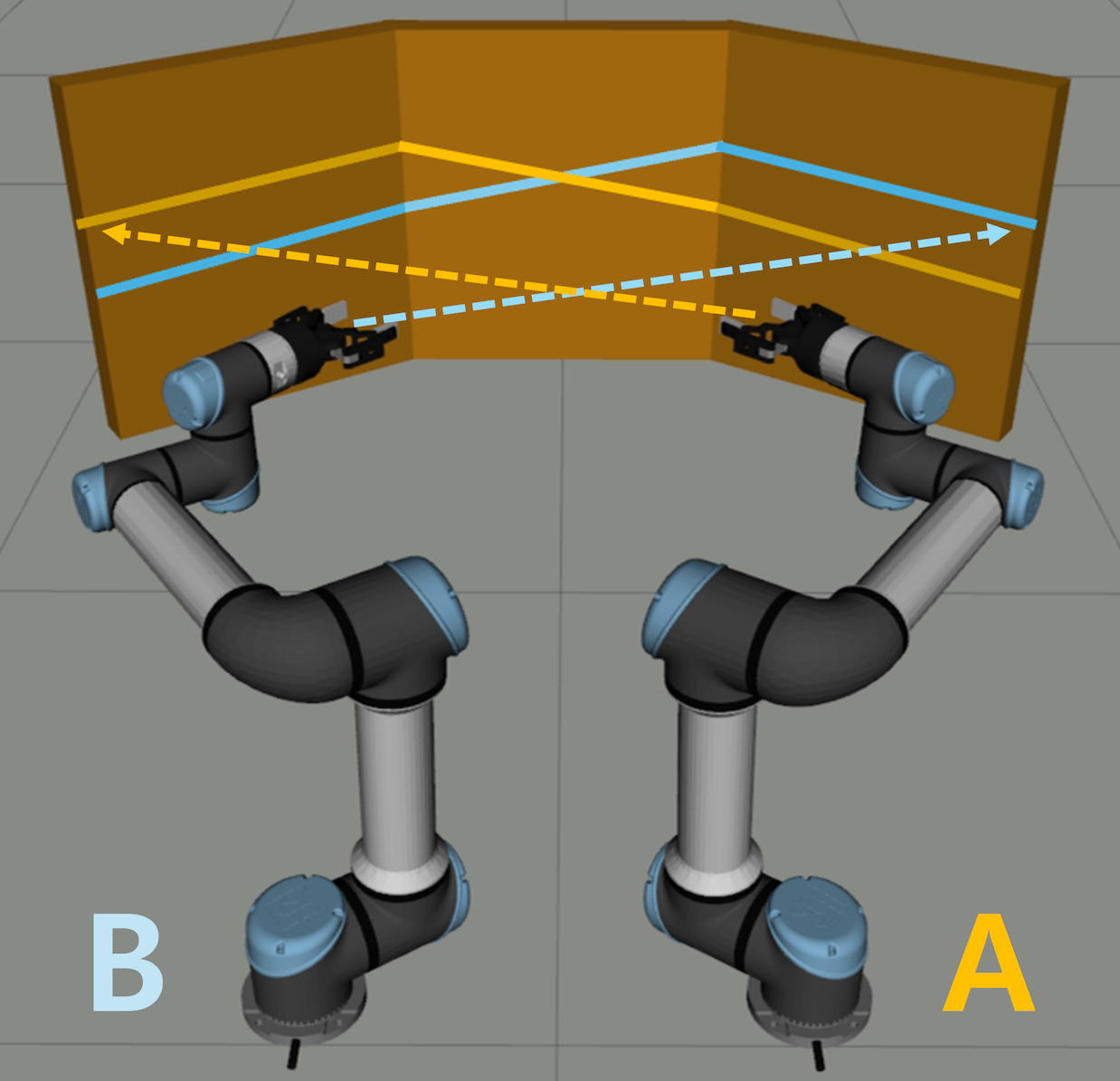
本文研究了拥挤环境中多个机器人手臂的运动规划问题,在共享工作空间中,目标位置可能被其他机器人占据或阻挡,除非这些机器人移开。虽然在耦合构型空间(C-空间)中规划很简单,但它难以随着机器人数量扩展,并且经常无法找到解决方案。解耦规划速度更快,但经常导致轨迹之间的冲突。我们提出了一种冲突消解方法,该方法使用A*搜索策略将暂停插入到单独规划的轨迹中,以最小化完工时间——直到所有机器人完成任务的总时间。这种方法允许一些机器人停止,使其他机器人能够在没有碰撞的情况下移动,并在C-空间中保持短距离。它还可以有效地处理目标位置最初被其他机器人阻挡的情况。实验结果表明,我们的方法成功地解决了基线方法无法找到可行解决方案的具有挑战性的实例。
🔬 方法详解
问题定义:论文旨在解决多机器人协作运动规划中的冲突问题,尤其是在拥挤环境中,机器人之间可能相互阻挡,导致无法到达目标位置。现有的耦合空间规划方法计算复杂度高,难以扩展到多机器人系统;解耦规划方法虽然速度快,但容易产生轨迹冲突,需要额外的冲突消解机制。
核心思路:论文的核心思路是通过在个体机器人的轨迹中插入“暂停”动作来解决冲突。这种方法允许某些机器人暂时停止,以便其他机器人能够安全地移动,从而避免碰撞或解除目标位置的阻塞。通过智能地安排这些暂停,可以有效地解决冲突,同时尽量减少整体的完工时间。
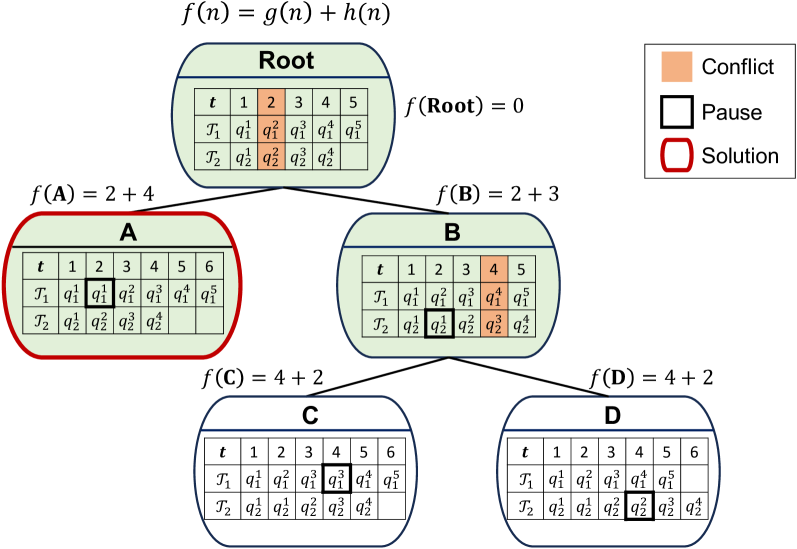
技术框架:Stop-N-Go方法的整体框架包括以下几个主要阶段:1) 初始轨迹规划:每个机器人独立地规划一条从起始位置到目标位置的轨迹。2) 冲突检测:检测所有机器人轨迹之间的冲突,例如碰撞或目标位置阻塞。3) 冲突消解:使用A搜索算法,在个体轨迹中插入暂停动作,以解决检测到的冲突。A搜索的目标是最小化所有机器人完成任务的总时间(makespan)。4) 轨迹优化:对插入暂停后的轨迹进行优化,例如平滑轨迹或调整暂停时间。
关键创新:该方法最重要的创新在于将冲突消解问题转化为一个搜索问题,并使用A*算法来寻找最优的暂停策略。与传统的基于规则或优化的冲突消解方法相比,基于搜索的方法能够更灵活地处理复杂的冲突情况,并找到更优的解决方案。此外,该方法能够有效地处理目标位置阻塞的情况,这是许多其他冲突消解方法无法做到的。
关键设计:A搜索算法的关键设计包括状态表示、动作定义、启发式函数和代价函数。状态表示包括每个机器人的当前位置和时间。动作定义包括继续当前轨迹或插入一个暂停。启发式函数用于估计从当前状态到目标状态的剩余时间,例如可以使用机器人之间的距离或剩余轨迹长度。代价函数用于评估每个动作的代价,例如暂停的代价可以设置为暂停的时间长度。论文中可能还涉及一些参数设置,例如A搜索的权重参数或暂停时间的最大长度。
🖼️ 关键图片
📊 实验亮点
实验结果表明,Stop-N-Go方法能够成功解决传统方法无法处理的复杂多机器人运动规划问题。在具有挑战性的场景中,该方法能够找到可行的解决方案,并且在完工时间方面表现出良好的性能。具体的性能数据和对比基线信息未知,但摘要强调了该方法在解决复杂实例方面的优势。
🎯 应用场景
该研究成果可应用于自动化仓库、智能工厂、医疗机器人等领域,在这些场景中,多个机器人需要在有限的空间内协同完成任务。通过使用Stop-N-Go方法,可以有效地解决机器人之间的冲突,提高生产效率和安全性。未来,该方法可以进一步扩展到更复杂的机器人系统,例如无人机群或自动驾驶车队。
📄 摘要(原文)
We address the motion planning problem for multiple robotic manipulators in packed environments where shared workspace can result in goal positions occupied or blocked by other robots unless those other robots move away to make the goal positions free. While planning in a coupled configuration space (C-space) is straightforward, it struggles to scale with the number of robots and often fails to find solutions. Decoupled planning is faster but frequently leads to conflicts between trajectories. We propose a conflict resolution approach that inserts pauses into individually planned trajectories using an A* search strategy to minimize the makespan--the total time until all robots complete their tasks. This method allows some robots to stop, enabling others to move without collisions, and maintains short distances in the C-space. It also effectively handles cases where goal positions are initially blocked by other robots. Experimental results show that our method successfully solves challenging instances where baseline methods fail to find feasible solutions.