FlowBotHD: History-Aware Diffuser Handling Ambiguities in Articulated Objects Manipulation
作者: Yishu Li, Wen Hui Leng, Yiming Fang, Ben Eisner, David Held
分类: cs.RO
发布日期: 2024-10-09 (更新: 2024-12-28)
备注: Accepted to CoRL 2024
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
FlowBotHD:历史感知扩散模型解决铰接物体操作中的歧义性问题
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 铰接物体操作 扩散模型 历史感知 视觉歧义 机器人控制
📋 核心要点
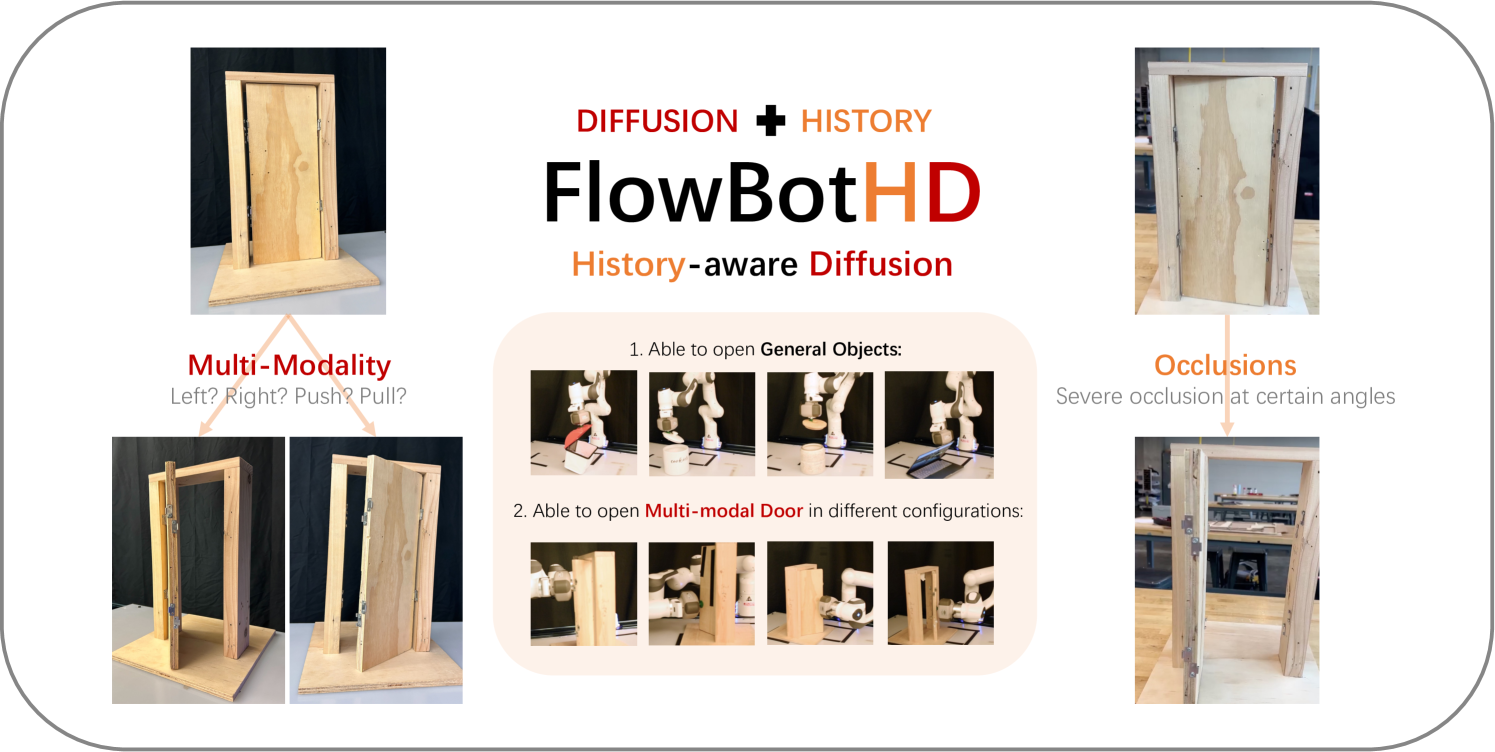
- 现有方法在处理对称或遮挡铰接物体时,难以消除视觉歧义,导致操作不稳定。
- 提出历史感知的扩散网络,建模铰接模式的多模态分布,利用历史观测区分模式。
- 实验表明,该方法在铰接物体操作上达到SOTA,显著提升了歧义物体操作性能。
📝 摘要(中文)
本文提出了一种新颖的铰接物体操作方法,尤其针对视觉上存在歧义的物体,例如对称或严重遮挡的门。这些歧义性会导致对不同铰接模式的不确定性:例如,当完全关闭的门的铰接方向(推、拉、滑动)或位置(左侧、右侧)不确定时,或者当门的平面等区分特征由于视角而被遮挡时。为了应对这些挑战,我们提出了一种历史感知的扩散网络,该网络可以对铰接物体的多模态铰接模式分布进行建模;我们的方法进一步利用观察历史来区分模式,并在遮挡下做出稳定的预测。实验和分析表明,我们的方法在铰接物体操作方面取得了最先进的性能,并显着提高了包含视觉歧义的铰接物体的性能。我们的项目网站位于 https://flowbothd.github.io/。
🔬 方法详解
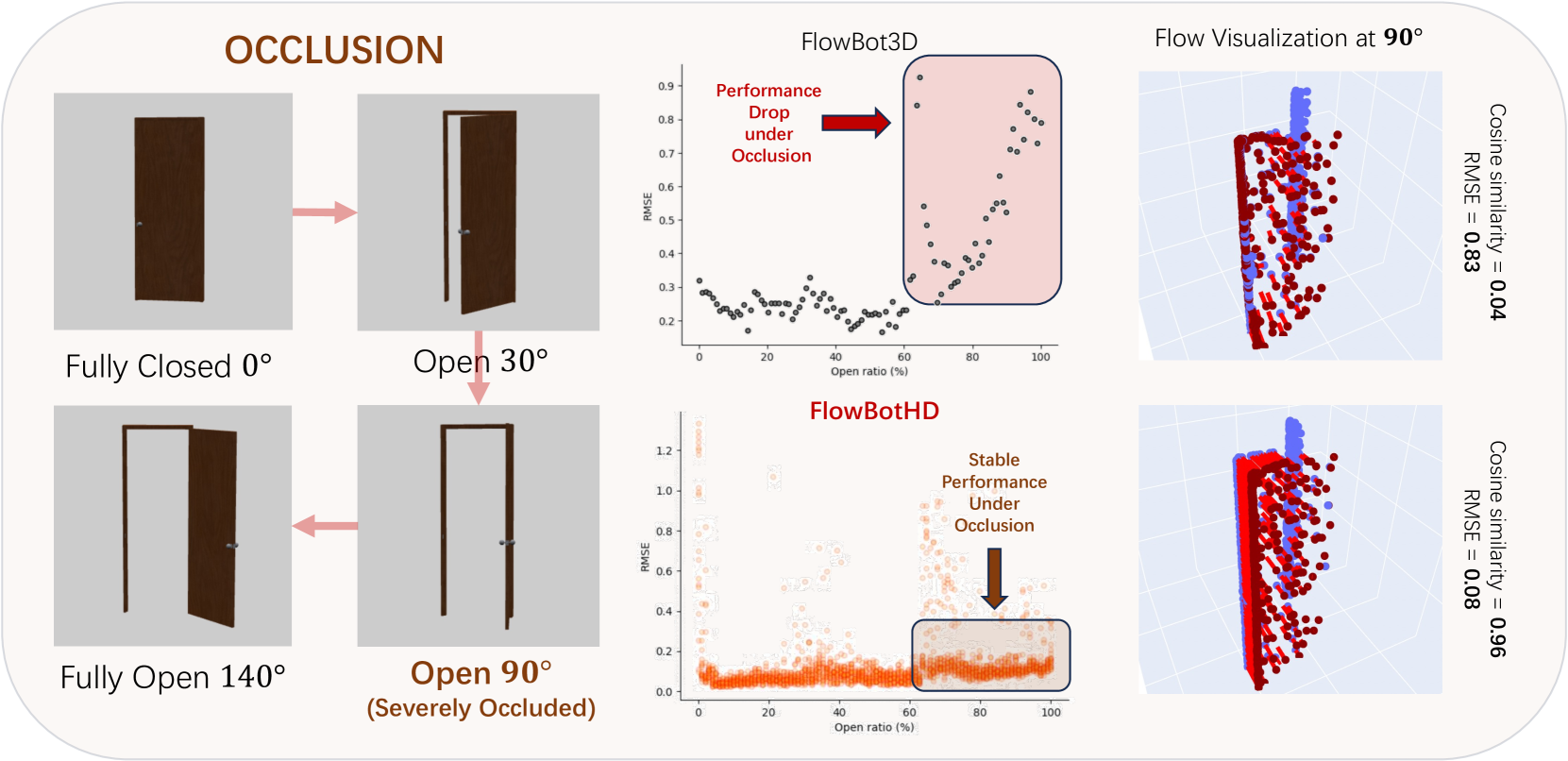
问题定义:论文旨在解决铰接物体操作中,由于视觉歧义(如对称性、遮挡)导致的操作不确定性问题。现有方法难以有效建模这些歧义性,导致在不同铰接模式间切换时出现不稳定现象,尤其是在遮挡情况下,性能会显著下降。
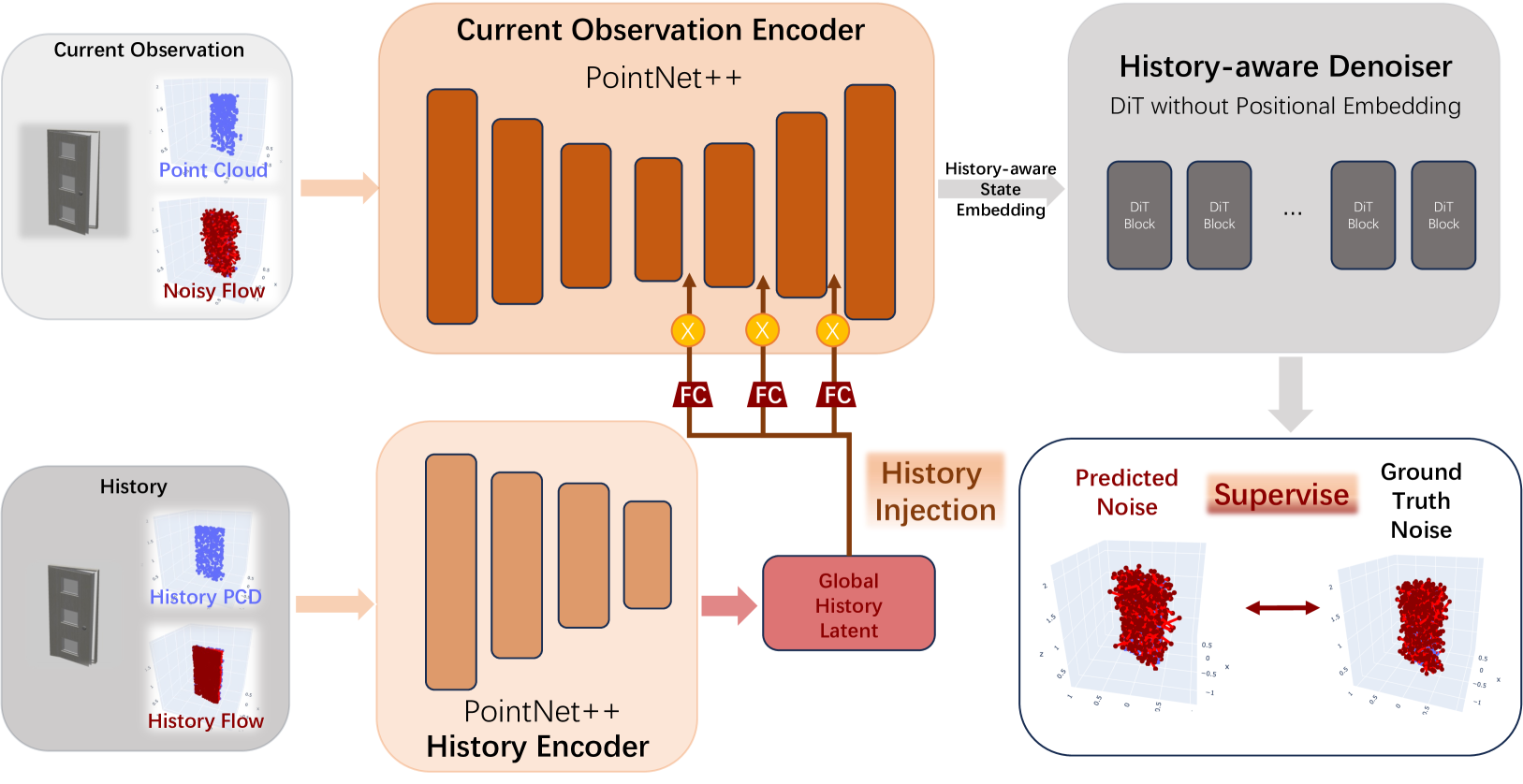
核心思路:论文的核心在于利用历史观测信息来消除歧义,并使用扩散模型来建模铰接模式的多模态分布。通过结合历史信息,模型可以更好地推断当前状态,并做出更稳定的预测。扩散模型能够捕捉不同铰接模式的可能性,从而应对歧义性带来的挑战。
技术框架:FlowBotHD 采用历史感知的扩散网络。整体流程包括:1)输入历史观测序列(例如,图像序列);2)使用历史感知模块提取特征,该模块可能包含循环神经网络或Transformer等结构;3)将提取的特征输入到扩散模型中,该模型学习铰接模式的分布;4)通过采样扩散模型,得到铰接模式的预测,并用于控制机械臂执行操作。
关键创新:关键创新在于将历史信息融入到扩散模型中,使其能够更好地处理视觉歧义。传统扩散模型通常只依赖于当前观测,而忽略了历史信息的重要性。通过引入历史感知模块,FlowBotHD 能够利用过去的信息来推断当前状态,从而提高操作的稳定性和准确性。
关键设计:论文中可能包含以下关键设计:1)历史感知模块的具体结构,例如使用的循环神经网络类型、Transformer的层数等;2)扩散模型的具体架构,例如使用的噪声调度策略、采样方法等;3)损失函数的设计,例如如何平衡不同铰接模式的预测误差、如何惩罚不稳定的操作等;4)数据增强策略,例如如何模拟不同的遮挡情况、如何生成更多样化的铰接模式。
🖼️ 关键图片
📊 实验亮点
实验结果表明,FlowBotHD 在铰接物体操作任务上取得了显著的性能提升,尤其是在处理包含视觉歧义的物体时。与现有方法相比,FlowBotHD 能够更稳定地预测铰接模式,并减少操作失败的概率。具体性能数据(例如成功率、操作时间)和对比基线需要在论文中查找。
🎯 应用场景
该研究成果可应用于机器人辅助装配、家庭服务机器人、自动化生产线等领域。例如,在复杂环境下,机器人可以更准确地操作门、抽屉等铰接物体,提高工作效率和安全性。未来,该技术有望扩展到更广泛的物体操作任务,实现更智能、更可靠的机器人操作。
📄 摘要(原文)
We introduce a novel approach for manipulating articulated objects which are visually ambiguous, such doors which are symmetric or which are heavily occluded. These ambiguities can cause uncertainty over different possible articulation modes: for instance, when the articulation direction (e.g. push, pull, slide) or location (e.g. left side, right side) of a fully closed door are uncertain, or when distinguishing features like the plane of the door are occluded due to the viewing angle. To tackle these challenges, we propose a history-aware diffusion network that can model multi-modal distributions over articulation modes for articulated objects; our method further uses observation history to distinguish between modes and make stable predictions under occlusions. Experiments and analysis demonstrate that our method achieves state-of-art performance on articulated object manipulation and dramatically improves performance for articulated objects containing visual ambiguities. Our project website is available at https://flowbothd.github.io/.