Dynamic Neural Potential Field: Online Trajectory Optimization in the Presence of Moving Obstacles
作者: Aleksei Staroverov, Muhammad Alhaddad, Aditya Narendra, Konstantin Mironov, Aleksandr Panov
分类: cs.RO, cs.AI
发布日期: 2024-10-09 (更新: 2025-10-04)
🔗 代码/项目: GITHUB
💡 一句话要点
提出动态神经势场(NPField-GPT),用于移动障碍物环境下的在线轨迹优化。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 动态轨迹优化 神经势场 模型预测控制 Transformer 碰撞避免
📋 核心要点
- 现有机器人策略在动态环境中难以保证安全性和可靠性,尤其是在人与物体不可预测地移动的场景中。
- NPField-GPT通过Transformer预测足迹感知的斥力势,并将其融入MPC框架,实现实时、约束感知的轨迹优化。
- 实验表明,NPField-GPT在动态场景中生成更安全轨迹,同时保持模型预测控制的透明性和稳定性。
📝 摘要(中文)
本文提出了一种学习增强的模型预测控制(MPC)框架,称为动态神经势场(NPField-GPT)。该框架将经典优化与基于Transformer的足迹感知斥力势预测器相结合。给定占据子图、机器人足迹和可选的动态障碍物线索,我们的自回归NPField-GPT头预测一系列可微分的势,并通过L4CasADi注入到序列二次MPC程序中,从而实现实时的、约束感知的轨迹优化。此外,我们还研究了两个基线:(NPField-D1)静态帧分解和(NPField-D2)所有步骤的并行MLP头。在BenchMR的动态室内场景和办公室走廊的Husky UGV上,NPField-GPT在运动变化下产生更安全、更保守的轨迹,而D1/D2提供更低的延迟。我们还将该方法与CIAO*和MPPI基线进行了比较。在所有方法中,Transformer+MPC的协同作用保留了基于模型的规划的透明性和稳定性,同时仅学习了从数据中受益的部分:时空碰撞风险。
🔬 方法详解
问题定义:论文旨在解决移动障碍物环境下机器人轨迹优化问题,现有方法难以兼顾安全性、实时性和对动态环境的适应性。传统方法可能依赖于人工设计的势场,难以应对复杂动态环境,而端到端学习方法缺乏透明性和稳定性。
核心思路:论文的核心思路是利用Transformer学习动态环境中的斥力势场,并将其作为先验知识融入到模型预测控制(MPC)框架中。通过学习环境中的碰撞风险,可以提高轨迹规划的安全性,同时MPC框架保证了轨迹的约束满足和稳定性。
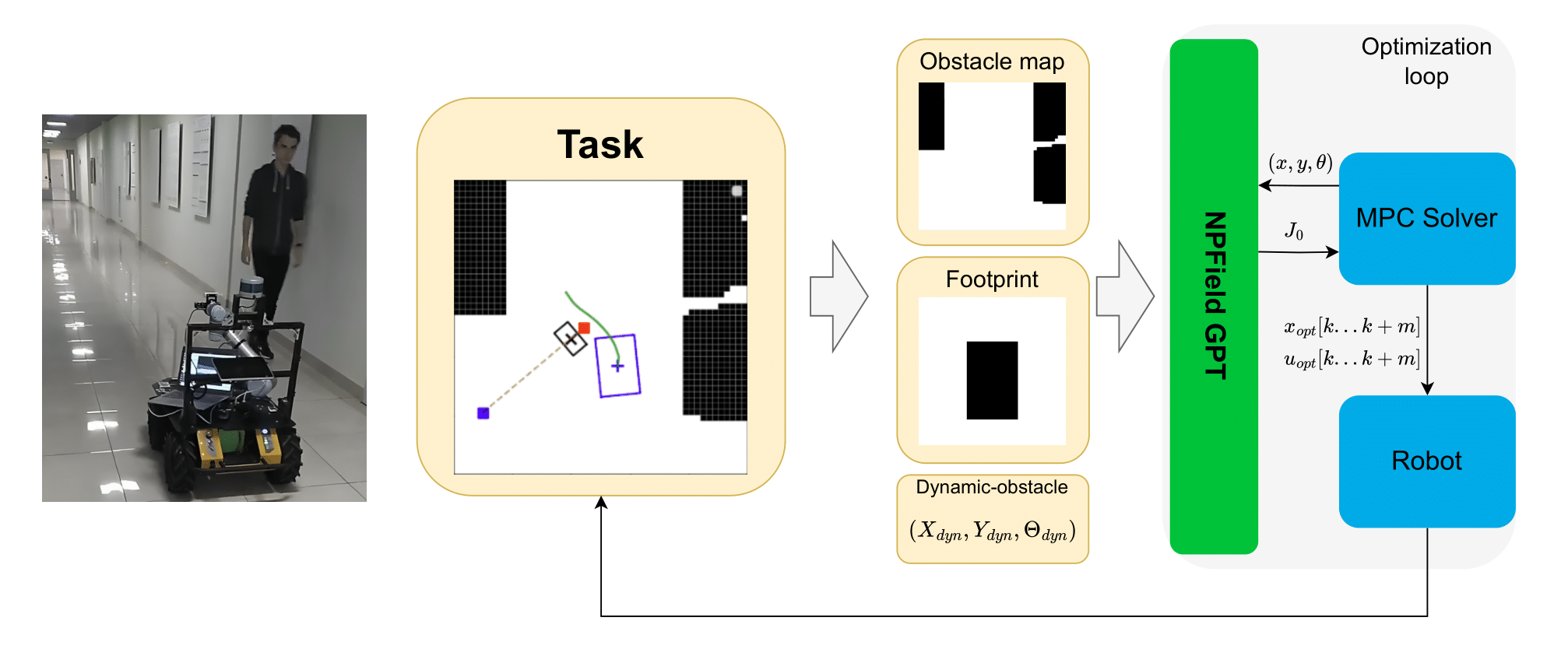
技术框架:整体框架包含三个主要模块:1) 环境感知模块,获取占据子图、机器人足迹和动态障碍物信息;2) NPField-GPT模块,基于Transformer预测未来一段时间内的斥力势场;3) MPC优化模块,将预测的斥力势场作为约束条件,通过序列二次规划(SQP)优化轨迹。L4CasADi用于连接NPField-GPT和MPC,实现可微分的优化过程。
关键创新:最重要的创新点在于将Transformer网络与模型预测控制相结合,利用Transformer学习动态环境中的时空碰撞风险,并将其转化为可微分的斥力势场,从而指导轨迹优化。这种方法既利用了学习方法的自适应性,又保留了模型预测控制的透明性和稳定性。
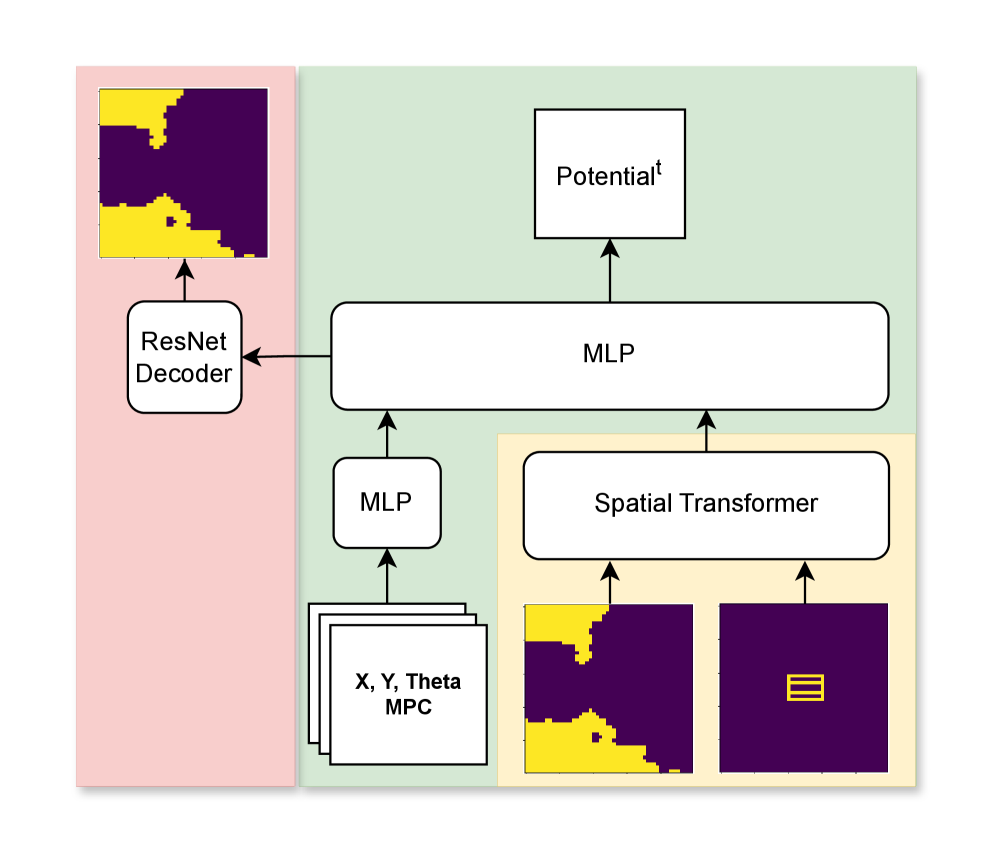
关键设计:NPField-GPT采用自回归结构,逐步预测未来时刻的斥力势场。损失函数可能包含预测势场与真实势场的差异,以及轨迹的平滑性约束。Transformer的输入包括占据子图、机器人足迹和动态障碍物信息。MPC优化器采用序列二次规划(SQP)算法,以最小化控制成本和轨迹长度为目标,同时满足运动学约束和碰撞避免约束。
🖼️ 关键图片
📊 实验亮点
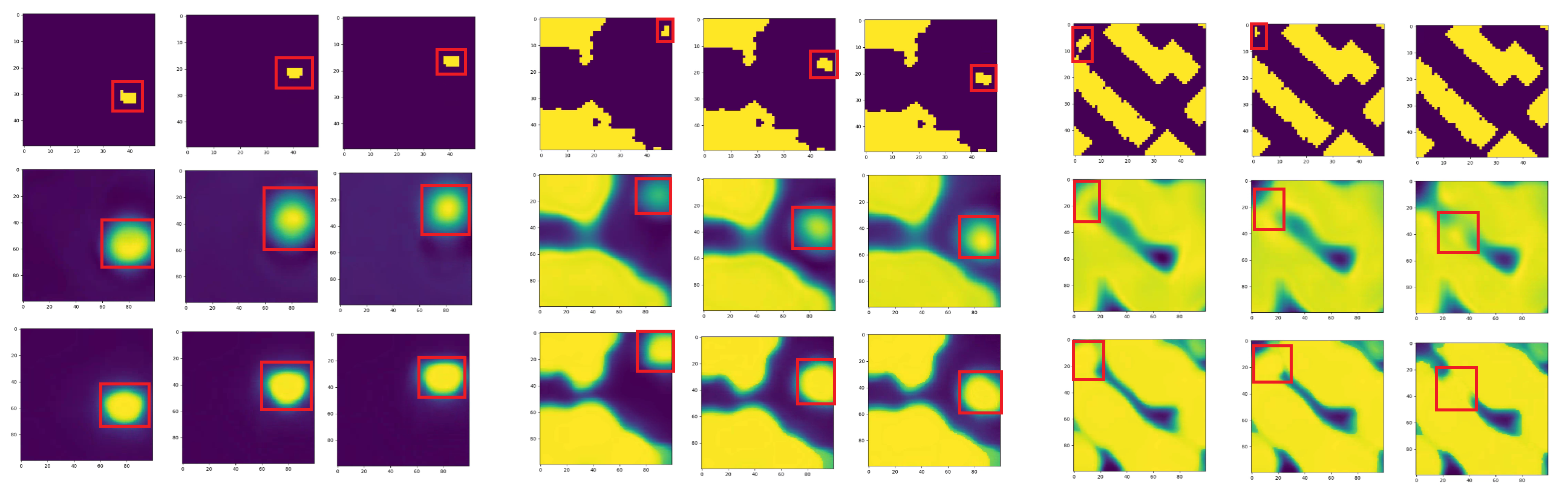
实验结果表明,NPField-GPT在BenchMR和实际办公环境中,相比于静态分解(NPField-D1/D2)以及CIAO*和MPPI等基线方法,能够生成更安全、更保守的轨迹,尤其是在运动变化剧烈的场景下。虽然D1/D2延迟更低,但NPField-GPT在安全性方面表现更优。
🎯 应用场景
该研究成果可应用于各种需要在动态环境中安全可靠运行的机器人系统,例如:家庭服务机器人、仓库物流机器人、自动驾驶汽车等。通过学习环境中的碰撞风险,机器人可以更好地适应动态变化,提高运行效率和安全性,降低事故风险。
📄 摘要(原文)
Generalist robot policies must operate safely and reliably in everyday human environments such as homes, offices, and warehouses, where people and objects move unpredictably. We present Dynamic Neural Potential Field (NPField-GPT), a learning-enhanced model predictive control (MPC) framework that couples classical optimization with a Transformer-based predictor of footprint-aware repulsive potentials. Given an occupancy sub-map, robot footprint, and optional dynamic-obstacle cues, our autoregressive NPField-GPT head forecasts a horizon of differentiable potentials that are injected into a sequential quadratic MPC program via L4CasADi, yielding real-time, constraint-aware trajectory optimization. We additionally study two baselines: (NPField-D1) static-frame decomposition and (NPField-D2) parallel MLP heads for all steps. In dynamic indoor scenarios from BenchMR and on a Husky UGV in office corridors, NPField-GPT produces safer, more conservative trajectories under motion changes, while D1/D2 offer lower latency. We also compare with the CIAO* and MPPI baselines. Across methods, the Transformer+MPC synergy preserves the transparency and stability of model-based planning while learning only the part that benefits from data: spatiotemporal collision risk. Code and trained models are available at https://github.com/CognitiveAISystems/Dynamic-Neural-Potential-Field