Learning Force Distribution Estimation for the GelSight Mini Optical Tactile Sensor Based on Finite Element Analysis
作者: Erik Helmut, Luca Dziarski, Niklas Funk, Boris Belousov, Jan Peters
分类: cs.RO, cs.LG
发布日期: 2024-10-08 (更新: 2026-01-13)
💡 一句话要点
提出基于有限元分析训练的U-Net模型,用于GelSight Mini触觉传感器力分布估计
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉传感 力分布估计 GelSight Mini 有限元分析 深度学习 U-Net 机器人操作
📋 核心要点
- 现有方法难以从GelSight Mini等光学触觉传感器的凝胶形变中准确推断剪切力和法向力分布。
- 利用有限元分析(FEA)生成训练数据,训练U-Net模型直接从传感器图像预测力分布。
- 实验表明,该模型能准确预测力分布,并具有良好的泛化能力和实时应用潜力。
📝 摘要(中文)
在机器人技术中,富接触操作仍然是一个主要的挑战。像GelSight Mini这样的光学触觉传感器通过捕捉硅胶的软体形变,为接触感知提供了一种低成本的解决方案。然而,如何从这些凝胶形变中准确推断剪切力和法向力分布尚未完全解决。本文提出了一种机器学习方法,使用U-Net架构直接从传感器的原始图像预测力分布。我们的模型在基于有限元分析(FEA)推断的力分布上进行训练,在预测商用GelSight Mini传感器的法向力和剪切力分布方面表现出良好的准确性。它还显示出在不同压头、同类型传感器上的泛化潜力,并能够实现实时应用。代码库、数据集和模型已开源,可在https://feats-ai.github.io 获取。
🔬 方法详解
问题定义:论文旨在解决GelSight Mini光学触觉传感器在接触操作中,难以准确估计接触面上的剪切力和法向力分布的问题。现有方法通常依赖于复杂的物理模型或手工设计的特征,难以适应各种接触情况,且计算成本较高,无法满足实时性要求。
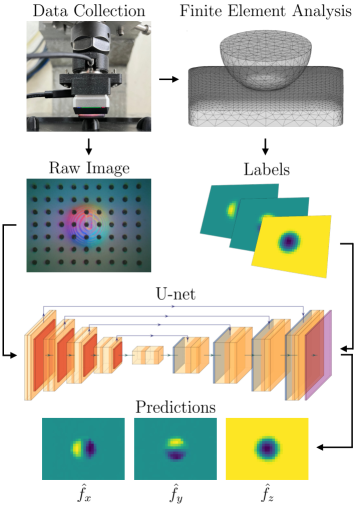
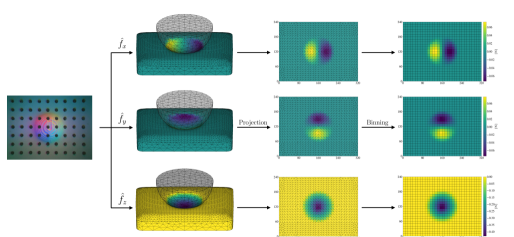
核心思路:论文的核心思路是利用深度学习方法,直接从GelSight Mini传感器采集的图像中学习力分布的映射关系。通过有限元分析(FEA)模拟各种接触情况下的力分布,生成大量的训练数据,然后训练一个U-Net模型,实现从图像到力分布的端到端预测。这种方法避免了复杂的物理建模过程,提高了预测精度和效率。
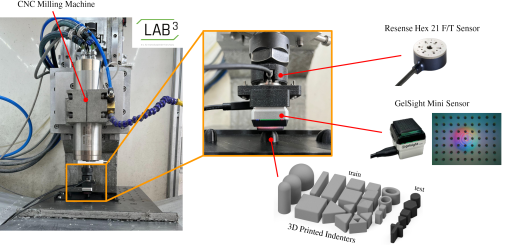
技术框架:整体框架包括数据生成和模型训练两个主要阶段。首先,使用有限元分析软件模拟GelSight Mini传感器在不同压头和接触条件下的形变和力分布,生成训练数据集。然后,使用U-Net模型进行训练,该模型以传感器图像作为输入,输出预测的力分布。训练完成后,可以使用该模型进行实时力分布估计。
关键创新:该论文的关键创新在于将有限元分析与深度学习相结合,用于解决触觉传感器的力分布估计问题。通过有限元分析生成高质量的训练数据,避免了真实实验数据的采集困难和标注成本。同时,使用U-Net模型能够有效地提取图像特征,并实现高精度的力分布预测。
关键设计:论文使用了U-Net作为主要的网络结构,这是一种常用的图像分割网络,具有良好的特征提取和空间信息保持能力。损失函数方面,使用了均方误差(MSE)损失函数,用于衡量预测力分布与真实力分布之间的差异。有限元分析中,选择了合适的材料参数和边界条件,以保证模拟结果的准确性。数据集包含了不同形状的压头和不同的接触位置,以提高模型的泛化能力。
🖼️ 关键图片
📊 实验亮点
该论文提出的方法在GelSight Mini传感器上实现了高精度的力分布估计。实验结果表明,该模型能够准确预测法向力和剪切力分布,并且具有良好的泛化能力,可以适应不同的压头和接触条件。此外,该模型还具有实时性,可以满足实际应用的需求。开源的代码库、数据集和模型为其他研究者提供了便利。
🎯 应用场景
该研究成果可应用于机器人灵巧操作、物体抓取、表面纹理识别等领域。通过准确估计接触力分布,机器人可以更好地感知环境,实现更稳定、更精确的操作。例如,在医疗机器人中,可以用于精确控制手术器械的力,避免对人体组织造成损伤。在工业机器人中,可以用于精确装配零件,提高生产效率和产品质量。
📄 摘要(原文)
Contact-rich manipulation remains a major challenge in robotics. Optical tactile sensors like GelSight Mini offer a low-cost solution for contact sensing by capturing soft-body deformations of the silicone gel. However, accurately inferring shear and normal force distributions from these gel deformations has yet to be fully addressed. In this work, we propose a machine learning approach using a U-net architecture to predict force distributions directly from the sensor's raw images. Our model, trained on force distributions inferred from \ac{fea}, demonstrates promising accuracy in predicting normal and shear force distributions for the commercially available GelSight Mini sensor. It also shows potential for generalization across indenters, sensors of the same type, and for enabling real-time application. The codebase, dataset and models are open-sourced and available at https://feats-ai.github.io .