MultiNash-PF: A Particle Filtering Approach for Computing Multiple Local Generalized Nash Equilibria in Trajectory Games
作者: Maulik Bhatt, Iman Askari, Yue Yu, Ufuk Topcu, Huazhen Fang, Negar Mehr
分类: cs.RO
发布日期: 2024-10-07 (更新: 2025-08-10)
💡 一句话要点
提出MultiNash-PF算法,用于求解轨迹博弈中多个局部广义纳什均衡,提升人机交互效率。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 多智能体交互 轨迹规划 广义纳什均衡 粒子滤波 人机协作
📋 核心要点
- 现有方法难以有效处理多智能体交互中的多模态问题,导致机器人难以适应不同的交互模式。
- MultiNash-PF结合势博弈和隐式粒子滤波,通过寻找多个局部广义纳什均衡来捕捉交互的多模态性。
- 实验表明,MultiNash-PF相比基线方法,计算时间减少高达50%,并在真实人机交互中有效解决冲突。
📝 摘要(中文)
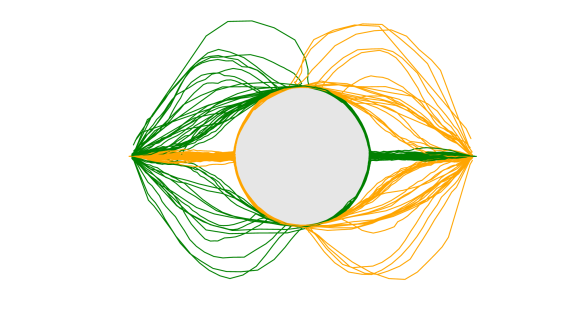
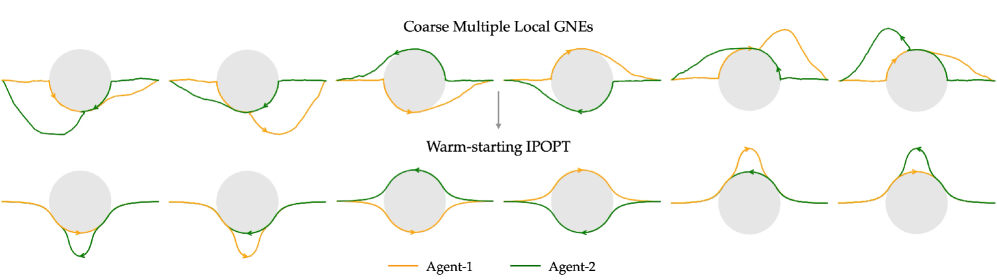
现代机器人系统经常参与复杂的多智能体交互,这些交互本质上是多模态的,可能导致多个不同的结果。为了有效地交互,机器人必须识别可能的交互模式并适应其他智能体偏好的模式。本文提出了MultiNash-PF,一种用于捕获多智能体交互中多模态性的高效算法。我们将交互结果建模为博弈论规划器的均衡,其中每个均衡对应于不同的交互模式。我们的框架将交互式规划公式化为约束势轨迹博弈(CPTG),其中局部广义纳什均衡(GNE)代表合理的交互结果。我们建议将势博弈方法与隐式粒子滤波相结合,这是一种用于非凸轨迹优化的样本高效方法。我们利用隐式粒子滤波来识别博弈势函数的多个局部最小值的粗略估计。然后,MultiNash-PF使用优化求解器细化这些估计,获得不同的局部GNE。通过数值模拟表明,与基线相比,MultiNash-PF减少了高达50%的计算时间。我们进一步证明了该算法在真实人机交互场景中的有效性,它成功地解释了交互的多模态性质,并实时解决了潜在的冲突。
🔬 方法详解
问题定义:论文旨在解决多智能体轨迹规划中,由于交互的复杂性和多模态性,难以找到所有可能的交互结果(即广义纳什均衡,GNE)的问题。现有方法通常只能找到单个GNE,无法应对真实世界中多种交互模式并存的情况。这导致机器人无法根据其他智能体的意图进行有效规划和决策,容易产生冲突。
核心思路:论文的核心思路是将多智能体交互建模为约束势轨迹博弈(CPTG),并利用寻找势函数多个局部最小值的方法来确定多个局部GNE。通过找到多个GNE,机器人可以更好地理解交互的多模态性,并选择最合适的策略。隐式粒子滤波被用于高效地搜索势函数的多个局部最小值。
技术框架:MultiNash-PF算法主要包含两个阶段:1) 使用隐式粒子滤波(Implicit Particle Filtering)对势函数进行采样,找到多个局部最小值的粗略估计;2) 使用优化求解器(Optimization Solver)对这些粗略估计进行细化,得到精确的局部GNE。整个框架将博弈论规划与非凸优化技术相结合,实现了对多模态交互的有效建模和求解。
关键创新:该论文的关键创新在于将隐式粒子滤波应用于求解多智能体轨迹博弈中的多个局部GNE。隐式粒子滤波是一种样本高效的非凸优化方法,能够有效地探索搜索空间,找到多个局部最小值。与传统的优化方法相比,MultiNash-PF能够更有效地捕捉交互的多模态性。
关键设计:CPTG的势函数设计是关键。势函数需要能够反映智能体之间的交互关系和目标,使得GNE对应于合理的交互结果。隐式粒子滤波中的粒子数量和重采样策略会影响算法的性能。优化求解器的选择和参数设置也会影响GNE的精度和计算效率。论文中具体参数设置未知。
🖼️ 关键图片

📊 实验亮点
论文通过数值模拟和真实人机交互实验验证了MultiNash-PF算法的有效性。数值模拟结果表明,与基线方法相比,MultiNash-PF能够减少高达50%的计算时间。在人机交互实验中,MultiNash-PF成功地解释了交互的多模态性质,并实时解决了潜在的冲突,展示了其在实际应用中的潜力。具体的性能指标和对比基线方法的详细信息未知。
🎯 应用场景
该研究成果可应用于各种多智能体交互场景,例如自动驾驶车辆的交通博弈、人机协作机器人、多机器人协同任务等。通过理解交互的多模态性,机器人能够做出更安全、更高效的决策,从而提高系统的整体性能和用户体验。该研究对于实现更智能、更自主的机器人系统具有重要意义。
📄 摘要(原文)
Modern robotic systems frequently engage in complex multi-agent interactions, many of which are inherently multi-modal, i.e., they can lead to multiple distinct outcomes. To interact effectively, robots must recognize the possible interaction modes and adapt to the one preferred by other agents. In this work, we propose MultiNash-PF, an efficient algorithm for capturing the multimodality in multi-agent interactions. We model interaction outcomes as equilibria of a game-theoretic planner, where each equilibrium corresponds to a distinct interaction mode. Our framework formulates interactive planning as Constrained Potential Trajectory Games (CPTGs), in which local Generalized Nash Equilibria (GNEs) represent plausible interaction outcomes. We propose to integrate the potential game approach with implicit particle filtering, a sample-efficient method for non-convex trajectory optimization. We utilize implicit particle filtering to identify the coarse estimates of multiple local minimizers of the game's potential function. MultiNash-PF then refines these estimates with optimization solvers, obtaining different local GNEs. We show through numerical simulations that MultiNash-PF reduces computation time by up to 50\% compared to a baseline. We further demonstrate the effectiveness of our algorithm in real-world human-robot interaction scenarios, where it successfully accounts for the multi-modal nature of interactions and resolves potential conflicts in real-time.