Tactile Displays Driven by Projected Light
作者: Max Linnander, Dustin Goetz, Gregory Reardon, Vijay Kumar, Elliot Hawkes, Yon Visell
分类: cs.ET, cs.HC, cs.RO, physics.optics
发布日期: 2024-10-07 (更新: 2025-11-04)
DOI: 10.1126/scirobotics.adv1383
💡 一句话要点
提出基于光驱动的高分辨率触觉显示器,实现动态触觉图案的高保真 воспроизведение
🎯 匹配领域: 支柱八:物理动画 (Physics-based Animation)
关键词: 触觉显示器 光驱动 光机械效应 高分辨率 人机交互
📋 核心要点
- 现有触觉显示器在分辨率、速度和动态范围上存在瓶颈,难以实现高保真触觉反馈。
- 该论文提出一种基于光驱动的触觉显示器,利用光机械表面将投影光转换为触觉图案。
- 实验结果表明,该显示器可实现高达1511像素的寻址,并能高保真地再现时空触觉图案。
📝 摘要(中文)
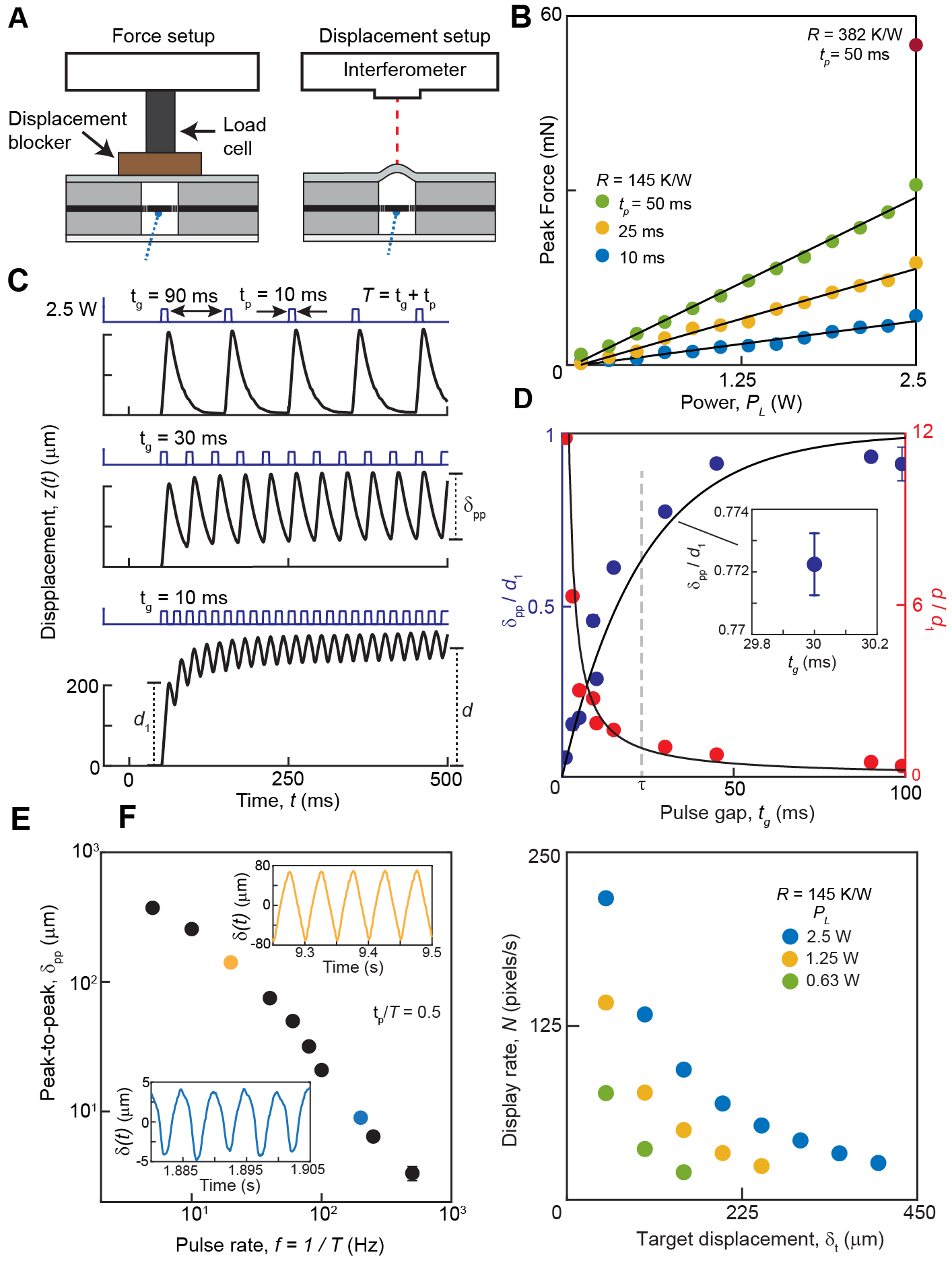
触觉显示器可以将数字内容转化为可感知的形式,从而变革人机交互方式。然而,实现感知保真度所需的分辨率、速度和动态范围仍然具有挑战性。本文提出了一种触觉显示器,它通过一个光机械表面将投影光直接转换为可见的触觉图案,该表面布满了毫米级的optotactile像素。这些像素通过光刺激的热气体膨胀将入射光转换为机械位移,产生毫米级的位移,响应时间为2到100毫秒。采用投影光进行功率传输和寻址使得这些显示器具有高度的可扩展性。我们展示了具有高达1511个可寻址像素的光驱动显示器,比任何先前达到类似性能的触觉显示器多出数倍。感知研究证实,这些显示器可以高保真地再现各种时空触觉图案。这项研究为实用、多功能、高分辨率的光驱动触觉显示器奠定了基础。
🔬 方法详解
问题定义:现有的触觉显示器在分辨率、响应速度和动态范围上存在限制,难以提供足够逼真的触觉体验。传统的机械式触觉显示器通常结构复杂、体积庞大,难以实现高密度的像素排列和快速的响应。
核心思路:该论文的核心思路是利用光驱动的方式,通过光机械效应将光能转化为机械位移,从而实现触觉反馈。具体而言,设计一种特殊的表面,该表面由大量微小的optotactile像素组成,每个像素都能将入射光转换为机械位移。通过控制投影光的图案,可以实现对触觉图案的精确控制。
技术框架:该触觉显示器的整体架构包括:投影系统、光机械表面和控制系统。投影系统负责将光图案投射到光机械表面上。光机械表面是核心部件,由大量optotactile像素组成,每个像素包含一个吸收光能并产生热膨胀的材料。控制系统负责控制投影光的图案,从而控制每个像素的机械位移。
关键创新:该论文最重要的技术创新在于利用光驱动的方式实现触觉反馈。与传统的机械式触觉显示器相比,光驱动的方式具有更高的分辨率、更快的响应速度和更大的动态范围。此外,采用投影光进行功率传输和寻址,使得该显示器具有高度的可扩展性。
关键设计:optotactile像素的设计是关键。每个像素包含一个吸收光能并产生热膨胀的材料,例如黑色聚合物。像素的尺寸和形状需要仔细设计,以实现最佳的光热转换效率和机械位移。此外,还需要考虑像素之间的热串扰,以避免影响触觉反馈的精度。投影系统的参数,如波长、功率和分辨率,也需要根据具体应用进行优化。
🖼️ 关键图片


📊 实验亮点
该研究成功构建了具有1511个可寻址像素的光驱动触觉显示器,像素数量远超以往同类设备。感知实验表明,该显示器能够以高保真度 воспроизведение 各种时空触觉图案,验证了其在触觉反馈方面的潜力。响应时间在2-100毫秒范围内,表明其具有较好的动态性能。
🎯 应用场景
该研究成果可应用于虚拟现实、远程医疗、机器人控制等领域。例如,在虚拟现实中,用户可以通过触觉显示器感受到虚拟物体的形状、纹理和温度,从而获得更沉浸式的体验。在远程医疗中,医生可以通过触觉显示器远程触诊病人,从而提高诊断的准确性。在机器人控制中,操作员可以通过触觉显示器感受到机器人抓取物体的力度和形状,从而实现更精确的控制。
📄 摘要(原文)
Tactile displays that lend tangible form to digital content could transform computing interactions. However, achieving the resolution, speed, and dynamic range needed for perceptual fidelity remains challenging. We present a tactile display that directly converts projected light into visible tactile patterns via a photomechanical surface populated with millimeter-scale optotactile pixels. The pixels transduce incident light into mechanical displacements through photostimulated thermal gas expansion, yielding millimeter scale displacements with response times of 2 to 100 milliseconds. Employing projected light for power transmission and addressing renders these displays highly scalable. We demonstrate optically driven displays with up to 1,511 addressable pixels -- several times more pixels than any prior tactile display attaining comparable performance. Perceptual studies confirm that these displays can reproduce diverse spatiotemporal tactile patterns with high fidelity. This research establishes a foundation for practical, versatile high-resolution tactile displays driven by light.