Proprioceptive State Estimation for Quadruped Robots using Invariant Kalman Filtering and Scale-Variant Robust Cost Functions
作者: Hilton Marques Souza Santana, João Carlos Virgolino Soares, Ylenia Nisticò, Marco Antonio Meggiolaro, Claudio Semini
分类: cs.RO
发布日期: 2024-10-07
备注: Accepted to the IEEE-RAS International Conference on Humanoid Robots 2024
💡 一句话要点
提出基于不变卡尔曼滤波和鲁棒代价函数的四足机器人本体状态估计方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 状态估计 不变卡尔曼滤波 鲁棒代价函数 本体感受 机器人导航 机器人控制
📋 核心要点
- 腿足机器人状态估计在复杂地形中面临挑战,传统方法难以保证精度和鲁棒性。
- 该论文提出结合不变扩展卡尔曼滤波和鲁棒代价函数,提升状态估计的精度和鲁棒性。
- 实验表明,该方法在长距离轨迹上显著降低了姿态漂移,优于现有先进方法。
📝 摘要(中文)
精确的状态估计对于腿足机器人的运动至关重要,因为它提供了控制和导航所需的必要信息。然而,状态估计也极具挑战性,尤其是在不平坦和湿滑地形等场景中。本文提出了一种新的不变扩展卡尔曼滤波器,用于仅使用本体感受传感器的腿足机器人状态估计。我们结合了状态估计理论的最新进展,并在测量更新中使用了鲁棒代价函数来构建该方法。通过实验和公共数据集在四足机器人上测试了我们的方法,结果表明,与最先进的不变扩展卡尔曼滤波器相比,在超过450米的轨迹上,我们的姿态漂移最多可降低40%。
🔬 方法详解
问题定义:腿足机器人需要在复杂环境中进行精确的状态估计,以便进行控制和导航。现有的状态估计方法,尤其是在不平坦和湿滑地形等场景中,容易受到传感器噪声和环境干扰的影响,导致状态估计精度下降,甚至出现发散。因此,如何提高腿足机器人在复杂环境下的状态估计精度和鲁棒性是一个关键问题。
核心思路:该论文的核心思路是将不变扩展卡尔曼滤波(Invariant Extended Kalman Filter, IEKF)与鲁棒代价函数相结合。IEKF能够保证状态估计的一致性,避免状态估计发散。鲁棒代价函数能够降低异常值(outliers)对状态估计的影响,提高状态估计的鲁棒性。通过结合这两种方法,可以提高腿足机器人在复杂环境下的状态估计精度和鲁棒性。
技术框架:该方法主要包含以下几个模块:1) 传感器数据采集:通过本体感受传感器(如IMU、关节编码器等)采集机器人状态信息。2) 状态预测:使用机器人动力学模型和控制输入,预测下一时刻的机器人状态。3) 测量更新:使用传感器测量值和鲁棒代价函数,对状态预测进行修正,得到最终的状态估计结果。整个框架基于不变扩展卡尔曼滤波,保证状态估计的一致性。
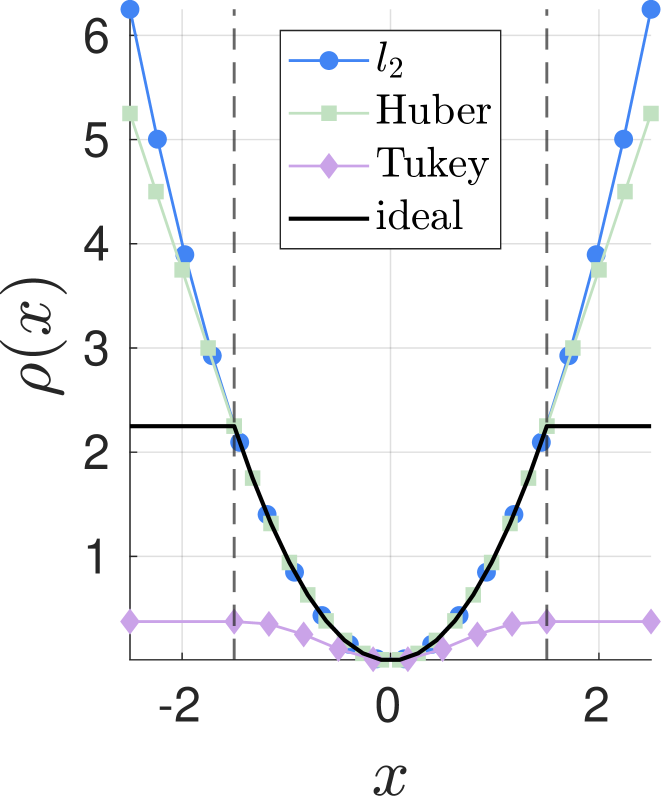
关键创新:该论文的关键创新在于将鲁棒代价函数引入到不变扩展卡尔曼滤波的测量更新中。传统的卡尔曼滤波使用平方误差作为代价函数,对异常值非常敏感。鲁棒代价函数能够降低异常值对状态估计的影响,提高状态估计的鲁棒性。此外,该论文还针对腿足机器人的特点,设计了合适的鲁棒代价函数。
关键设计:论文中使用了Scale-Variant Robust Cost Functions,这是一种自适应调整权重的鲁棒代价函数,能够根据测量值的残差大小,动态调整测量值的权重。对于残差较大的测量值,降低其权重,从而降低异常值的影响。具体的代价函数形式和参数设置需要根据具体的应用场景进行调整。
🖼️ 关键图片


📊 实验亮点
实验结果表明,该方法在长距离轨迹上显著降低了姿态漂移。在超过450米的轨迹上,与最先进的不变扩展卡尔曼滤波器相比,该方法的姿态漂移最多可降低40%。这表明该方法能够有效地提高腿足机器人在复杂环境下的状态估计精度和鲁棒性。
🎯 应用场景
该研究成果可应用于各种腿足机器人,例如四足机器人、双足机器人等。通过提高腿足机器人的状态估计精度和鲁棒性,可以提高其在复杂环境下的运动能力,使其能够更好地完成搜索救援、物流运输、巡检等任务。此外,该研究成果还可以应用于其他需要高精度状态估计的机器人系统,例如无人机、无人车等。
📄 摘要(原文)
Accurate state estimation is crucial for legged robot locomotion, as it provides the necessary information to allow control and navigation. However, it is also challenging, especially in scenarios with uneven and slippery terrain. This paper presents a new Invariant Extended Kalman filter for legged robot state estimation using only proprioceptive sensors. We formulate the methodology by combining recent advances in state estimation theory with the use of robust cost functions in the measurement update. We tested our methodology on quadruped robots through experiments and public datasets, showing that we can obtain a pose drift up to 40% lower in trajectories covering a distance of over 450m, in comparison with a state-of-the-art Invariant Extended Kalman filter.