A physics-based sensor simulation environment for lunar ground operations
作者: Nevindu M. Batagoda, Bo-Hsun Chen, Harry Zhang, Radu Serban, Dan Negrut
分类: cs.RO
发布日期: 2024-10-06
备注: 19 pages, 20 figures, 3 tables. This work has been submitted to the 2025 IEEE Aerospace Conference for possible publication
💡 一句话要点
提出基于物理的传感器仿真环境以支持月球地面操作
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 物理仿真 月球探测 相机模拟 光线追踪 地形交互 感知算法 虚拟实验
📋 核心要点
- 现有方法在模拟月球环境下的相机操作时,难以真实再现光传输和地形交互的复杂性。
- 论文提出了一种基于物理的仿真框架,能够生成高质量的合成图像,模拟月球条件下的相机操作。
- 通过与NASA的VIPER探测器和RASSOR挖掘机的虚拟实验,验证了该仿真器在感知算法设计中的有效性。
📝 摘要(中文)
本文报告了一种软件框架,该框架利用基于物理的渲染技术来模拟月球条件下的相机操作。重点在于生成与实际相机在月球地形上操作时产生的合成图像相似的图像,特别是在施工操作中。该仿真器的亮点在于能够捕捉月球条件下的光传输和与车辆-地形交互相关的伪影,包括尘埃形成和运输。仿真基础设施建立在自主开发的物理引擎Chrono之上,能够模拟可变形地形与车辆的动态交互及其后果。Chrono::Sensor相机模型基于光线追踪和Hapke光度函数。我们通过两个虚拟实验分析了仿真器的性能,分别是NASA的VIPER探测器在月球环境中的导航和NASA的RASSOR挖掘机进行挖掘操作。该传感器仿真解决方案可用于感知算法的设计与测试,或作为与大型月球操作相关的计算实验的组成部分。
🔬 方法详解
问题定义:本文旨在解决在月球环境中模拟相机操作时,现有方法无法真实再现光传输和车辆与地形交互的复杂性的问题。
核心思路:论文的核心思路是利用基于物理的渲染技术,结合自主开发的物理引擎Chrono,来生成与实际相机相似的合成图像,从而提高仿真效果的真实性。
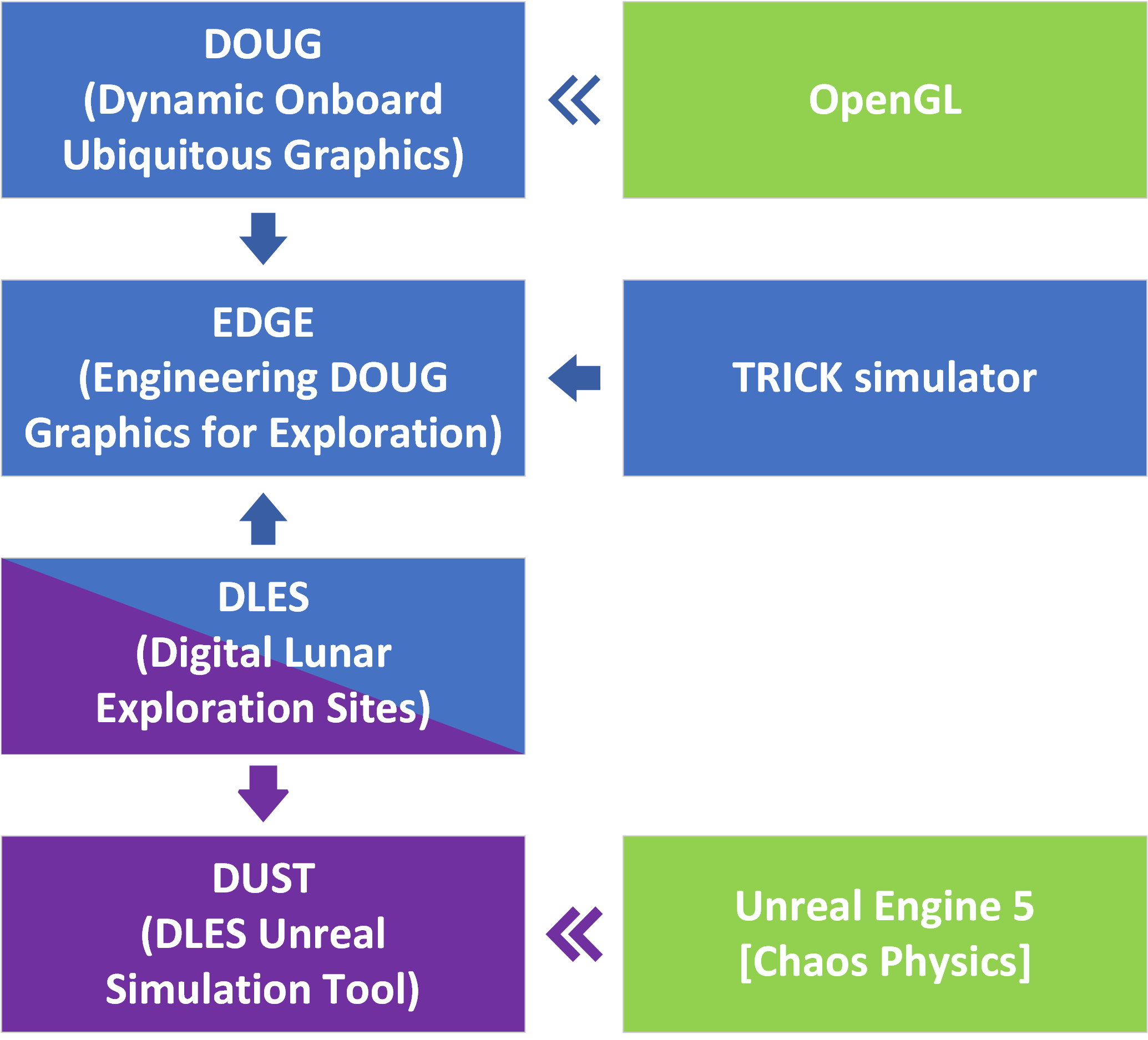
技术框架:整体架构包括物理引擎Chrono、光线追踪模块和Hapke光度函数,主要模块包括光传输模拟、地形-车辆动态交互模拟和图像生成。
关键创新:最重要的技术创新在于将物理引擎与光线追踪技术结合,能够真实模拟月球条件下的光传输和尘埃交互,显著提升了仿真图像的质量。
关键设计:在设计中,采用了Hapke光度函数来模拟月球表面的光反射特性,并通过优化参数设置来提高仿真效率和图像质量。具体的损失函数和网络结构细节在论文中进行了详细描述。
🖼️ 关键图片

📊 实验亮点
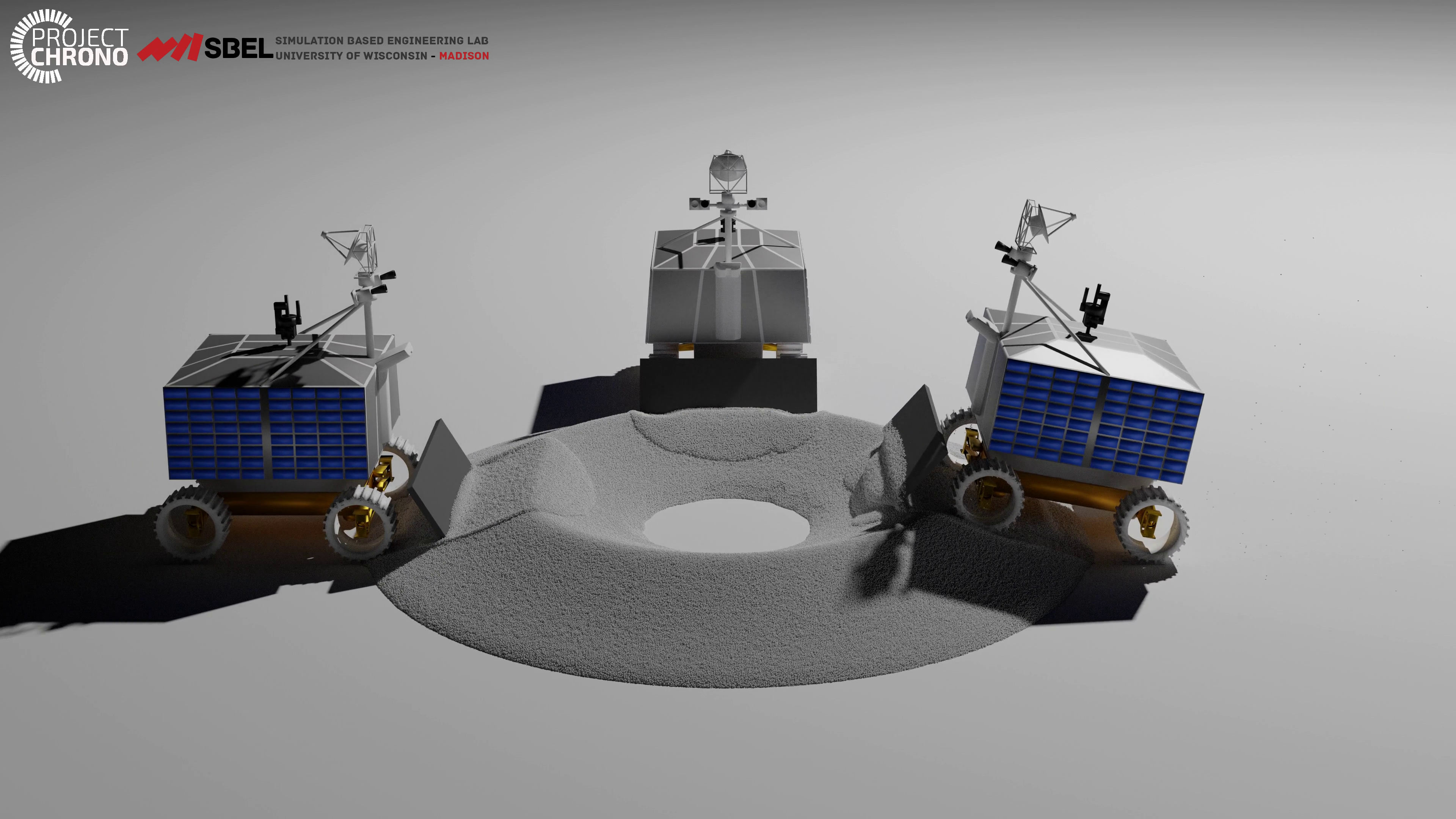
在实验中,使用NASA的VIPER探测器和RASSOR挖掘机的数字双胞胎进行验证,结果显示该仿真器能够生成与实际操作相似的图像,显著提高了对月球环境的理解和操作的有效性,为未来的月球任务提供了重要支持。
🎯 应用场景
该研究的潜在应用领域包括月球探测器的设计与测试、月球施工任务的规划以及相关的感知算法开发。通过提供高质量的仿真环境,可以有效降低实际操作中的风险和成本,推动月球探索的进程。
📄 摘要(原文)
This contribution reports on a software framework that uses physically-based rendering to simulate camera operation in lunar conditions. The focus is on generating synthetic images qualitatively similar to those produced by an actual camera operating on a vehicle traversing and/or actively interacting with lunar terrain, e.g., for construction operations. The highlights of this simulator are its ability to capture (i) light transport in lunar conditions and (ii) artifacts related to the vehicle-terrain interaction, which might include dust formation and transport. The simulation infrastructure is built within an in-house developed physics engine called Chrono, which simulates the dynamics of the deformable terrain-vehicle interaction, as well as fallout of this interaction. The Chrono::Sensor camera model draws on ray tracing and Hapke Photometric Functions. We analyze the performance of the simulator using two virtual experiments featuring digital twins of NASA's VIPER rover navigating a lunar environment, and of the NASA's RASSOR excavator engaged into a digging operation. The sensor simulation solution presented can be used for the design and testing of perception algorithms, or as a component of in-silico experiments that pertain to large lunar operations, e.g., traversability, construction tasks.