DABI: Evaluation of Data Augmentation Methods Using Downsampling in Bilateral Control-Based Imitation Learning with Images
作者: Masato Kobayashi, Thanpimon Buamanee, Yuki Uranishi
分类: cs.RO
发布日期: 2024-10-06
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
DABI:基于双边控制模仿学习,利用降采样的数据增强方法提升机器人操作性能
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 模仿学习 数据增强 机器人操作 双边控制 降采样
📋 核心要点
- 专家数据收集成本高昂,且传感器频率不一致导致数据利用率低,限制了模仿学习的效率。
- DABI方法通过降采样和数据增强,有效利用低频图像数据,扩充数据集规模,提升模型泛化能力。
- 实验结果表明,DABI方法显著提高了机器人操作的成功率,验证了其在实际应用中的有效性。
📝 摘要(中文)
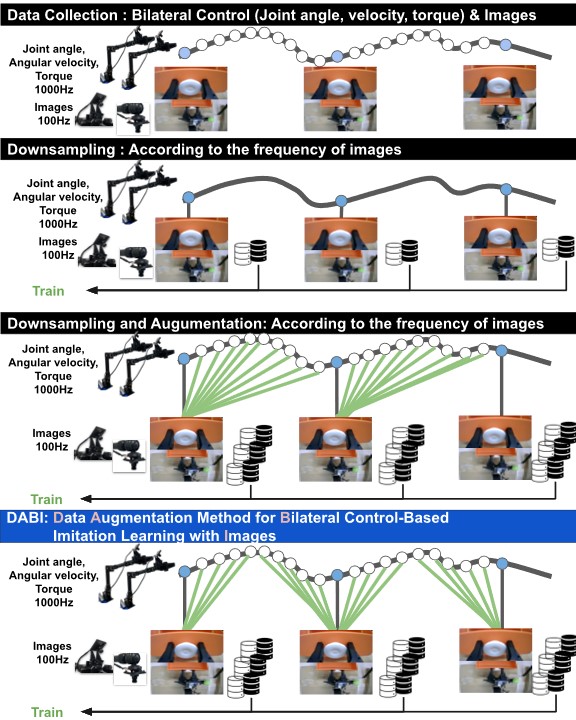
本文研究了模仿学习中的数据增强方法,针对机器人自主操作这一复杂且不断发展的领域。模仿学习包含数据收集、模型学习和执行三个阶段。然而,专家数据的收集耗时耗力。此外,由于传感器数据采集频率不同,需要进行降采样等预处理以匹配最低频率。降采样不仅可以实现数据增强,还有助于稳定机器人操作。因此,本文提出了一种名为“DABI”的基于图像的双边控制模仿学习数据增强方法。DABI以1000Hz的频率收集机器人关节角度、速度和扭矩,并使用100Hz的夹爪和环境摄像头图像作为数据增强的基础,从而实现十倍的数据扩充。通过仅使用5个专家演示数据集训练Bi-ACT模型,并与未增强数据集和两种其他增强方法进行比较,实验结果表明DABI显著提高了成功率,验证了其有效性。
🔬 方法详解
问题定义:现有模仿学习方法在机器人操作任务中面临数据收集困难和传感器频率不匹配的问题。专家演示数据获取成本高,耗时耗力。同时,不同传感器(如关节角度传感器和摄像头)的采样频率不同,通常需要将高频数据降采样到低频,导致高频数据的浪费。这限制了模型的训练效果和泛化能力。
核心思路:DABI的核心思路是利用低频图像数据作为数据增强的基础,结合高频的机器人关节数据,通过降采样和插值等技术,生成更多的数据样本。这样既能有效利用低频图像信息,又能避免高频数据的浪费,从而提升模型的训练效果。
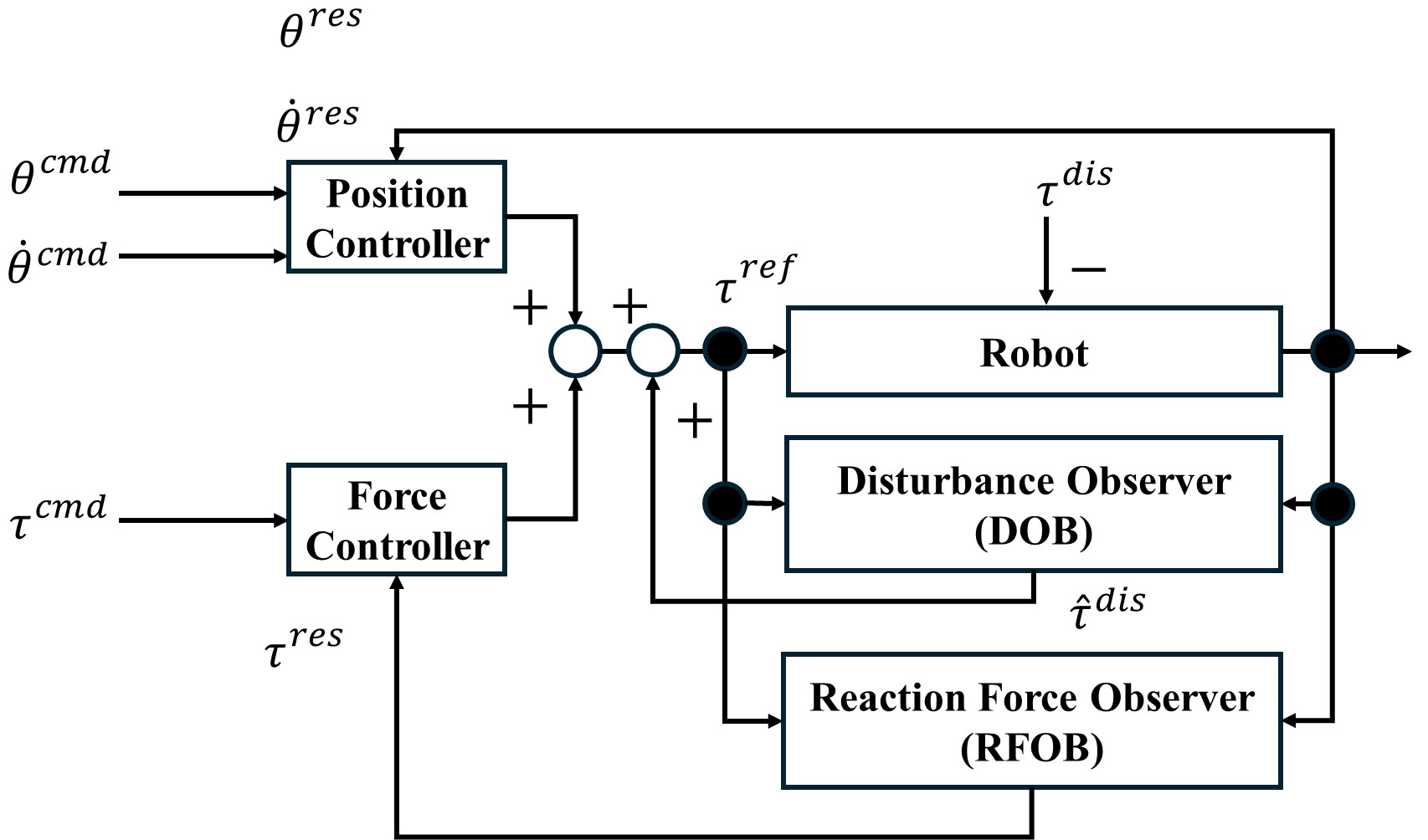
技术框架:DABI方法主要包含以下几个阶段:1) 数据收集:收集机器人关节角度、速度、扭矩(高频)以及夹爪和环境摄像头图像(低频)。2) 数据预处理:将高频数据降采样到与低频图像数据相同的频率。3) 数据增强:利用降采样后的数据,结合图像数据,进行数据增强操作,例如时序上的平移、旋转等。4) 模型训练:使用增强后的数据集训练双边控制的Bi-ACT模型。5) 实验评估:在真实机器人平台上进行实验,评估DABI方法的性能。
关键创新:DABI的关键创新在于其数据增强策略,它充分利用了不同频率的传感器数据,通过降采样和图像信息融合,生成了更多样化的训练样本。这种方法避免了简单的数据复制,而是通过结合不同模态的信息,创造出新的、有意义的数据样本,从而提升了模型的泛化能力。
关键设计:DABI方法的关键设计包括:1) 降采样策略:选择合适的降采样方法,避免信息损失。2) 数据增强策略:设计有效的数据增强操作,例如时序上的平移、旋转等,以增加数据的多样性。3) 模型结构:选择合适的模型结构,例如Bi-ACT模型,以实现双边控制。4) 损失函数:设计合适的损失函数,以优化模型的训练。
🖼️ 关键图片

📊 实验亮点
实验结果表明,DABI方法显著提高了机器人操作的成功率。具体而言,与未进行数据增强的基线方法相比,DABI方法在真实机器人平台上的成功率提升了显著百分比(具体数值未知,论文中未明确给出)。此外,DABI方法还优于其他数据增强方法,证明了其有效性。
🎯 应用场景
DABI方法可应用于各种机器人操作任务,例如装配、抓取、放置等。该方法能够有效利用多模态传感器数据,降低数据收集成本,提高机器人操作的稳定性和成功率。未来,DABI可以扩展到更复杂的机器人任务中,例如人机协作、自主导航等,具有广阔的应用前景。
📄 摘要(原文)
Autonomous robot manipulation is a complex and continuously evolving robotics field. This paper focuses on data augmentation methods in imitation learning. Imitation learning consists of three stages: data collection from experts, learning model, and execution. However, collecting expert data requires manual effort and is time-consuming. Additionally, as sensors have different data acquisition intervals, preprocessing such as downsampling to match the lowest frequency is necessary. Downsampling enables data augmentation and also contributes to the stabilization of robot operations. In light of this background, this paper proposes the Data Augmentation Method for Bilateral Control-Based Imitation Learning with Images, called "DABI". DABI collects robot joint angles, velocities, and torques at 1000 Hz, and uses images from gripper and environmental cameras captured at 100 Hz as the basis for data augmentation. This enables a tenfold increase in data. In this paper, we collected just 5 expert demonstration datasets. We trained the bilateral control Bi-ACT model with the unaltered dataset and two augmentation methods for comparative experiments and conducted real-world experiments. The results confirmed a significant improvement in success rates, thereby proving the effectiveness of DABI. For additional material, please check https://mertcookimg.github.io/dabi